Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Novel Method PMDC Motor Speed ControlДокумент15 страницNovel Method PMDC Motor Speed ControlTravis WoodОценок пока нет
- DC Motor ControlДокумент16 страницDC Motor Controlthatchaphan norkhamОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Fpga Based BLDC Motor ControlДокумент20 страницFpga Based BLDC Motor ControlPreeti Mishra100% (1)
- Linear Functional Analysis: Joan CerdàДокумент26 страницLinear Functional Analysis: Joan CerdàRonan GoisОценок пока нет
- PLC Manual FinalДокумент32 страницыPLC Manual FinalMuhammad Usama Muhammad SaleemОценок пока нет
- PID Speed Control of DC Motor Using MicrocontrollerДокумент7 страницPID Speed Control of DC Motor Using MicrocontrollerGias NawariОценок пока нет
- DC Motor Speed Control Using C++Документ23 страницыDC Motor Speed Control Using C++eraditya200150% (2)
- AISI 8620 SteelДокумент2 страницыAISI 8620 SteelVinit AhluwaliaОценок пока нет
- DC Motor Bidirectional Speed Control Using PWM PDFДокумент5 страницDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- DC Motor Speed ControlДокумент7 страницDC Motor Speed ControlBiyadglgne Eskezia AyalewОценок пока нет
- DC Motor Speed Control Part I: Open-Loop CommandДокумент5 страницDC Motor Speed Control Part I: Open-Loop CommandEbd RahmanОценок пока нет
- Microcontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarДокумент4 страницыMicrocontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarJagdish PatankarОценок пока нет
- Speed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)Документ4 страницыSpeed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)IJSTEОценок пока нет
- DC Motor Control: Jacob FainguelerntДокумент30 страницDC Motor Control: Jacob Fainguelerntcontrol 4uonlyОценок пока нет
- Projects Based On Audino DC Motor ControlДокумент15 страницProjects Based On Audino DC Motor Controlnagasaikiran ponnapalli0% (1)
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Документ30 страницDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाОценок пока нет
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Документ7 страницHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Speed Control of A DC Motor Using Hand GestureДокумент4 страницыSpeed Control of A DC Motor Using Hand GestureArka Prava LahiriОценок пока нет
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerДокумент12 страницFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaОценок пока нет
- Speed Control of DC Motor Using Pulse Width ModulationДокумент5 страницSpeed Control of DC Motor Using Pulse Width ModulationSyed muhammad zaidi100% (1)
- Digital Signal Processing Project Report: Ihtisham Ul HaqДокумент9 страницDigital Signal Processing Project Report: Ihtisham Ul Haqihtishamul HaqОценок пока нет
- Result Paper: (TMS320 F 28027) Microcontroller Based PWM Signal Generation For Speed Control of DC MotorДокумент3 страницыResult Paper: (TMS320 F 28027) Microcontroller Based PWM Signal Generation For Speed Control of DC MotorEditor IJRITCCОценок пока нет
- Fast PWM Mode. DC Motor. Servo MotorДокумент21 страницаFast PWM Mode. DC Motor. Servo MotorAya Adel Gouma AbdElGaidОценок пока нет
- 00718a - Brush-DC Servomotor Implementation Using PIC17C756AДокумент33 страницы00718a - Brush-DC Servomotor Implementation Using PIC17C756AadisaksОценок пока нет
- Arduino DC Motor ControlДокумент4 страницыArduino DC Motor ControlKathryn WorkmanОценок пока нет
- MSD Exp2Документ5 страницMSD Exp2ngolos247Оценок пока нет
- (212142518) Stepper Motor Control Using MicrocontrollerДокумент4 страницы(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiОценок пока нет
- AN025-DC Motor Control With TMC4671Документ11 страницAN025-DC Motor Control With TMC4671Roland von KurnatowskiОценок пока нет
- Speed Control of DC Motor Using Pulse Width ModulationДокумент30 страницSpeed Control of DC Motor Using Pulse Width ModulationRatul SarkarОценок пока нет
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareДокумент7 страницMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumОценок пока нет
- Erii21 Motor Control PWMДокумент12 страницErii21 Motor Control PWMpallinalvitesОценок пока нет
- CS328 DSPДокумент4 страницыCS328 DSPMohammed BenbrahimОценок пока нет
- Brushless DC Electric Motor Control by CPLDДокумент6 страницBrushless DC Electric Motor Control by CPLDIonela100% (3)
- MCES - 18CS44 - Unit4 PWM - DCMotorДокумент9 страницMCES - 18CS44 - Unit4 PWM - DCMotorSAKSHAM PRASADОценок пока нет
- Mini Project DC MotorДокумент20 страницMini Project DC MotorDeepanshu patelОценок пока нет
- DC Motor Control LabДокумент10 страницDC Motor Control LabShankarSridharОценок пока нет
- Microcontroller Based DC Motor Speed Control Using PWM TechniqueДокумент5 страницMicrocontroller Based DC Motor Speed Control Using PWM TechniqueswetaОценок пока нет
- Vehicle Speed Control System Using RF CommunicationДокумент80 страницVehicle Speed Control System Using RF CommunicationSaheb Amrinder100% (6)
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Документ63 страницыChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanОценок пока нет
- DC Motor Control LabДокумент5 страницDC Motor Control Labdks697bvhcОценок пока нет
- Experiment 7 PWMДокумент3 страницыExperiment 7 PWMABHISHEK SHARMAОценок пока нет
- Doc-Speed Control of A DC Motor Using Micro Controller 8051Документ21 страницаDoc-Speed Control of A DC Motor Using Micro Controller 8051Mohit Keshri100% (1)
- Servo Motor Control by Using Microcontroller PIC16F877AДокумент12 страницServo Motor Control by Using Microcontroller PIC16F877Aeeindustrial100% (1)
- Railway Accident Monitoring System: A Project Report ONДокумент13 страницRailway Accident Monitoring System: A Project Report ONPrateek SrivastavОценок пока нет
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaДокумент5 страницSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarОценок пока нет
- Tip23 e PDFДокумент4 страницыTip23 e PDFThanh BaronОценок пока нет
- AnotherДокумент51 страницаAnotherRoopam AmborОценок пока нет
- PID Practical PDFДокумент18 страницPID Practical PDFJose Luis HurtadoОценок пока нет
- Final Report Acs 12Документ36 страницFinal Report Acs 12Abhishek SinghОценок пока нет
- Four - Quadrant Control SystemsДокумент4 страницыFour - Quadrant Control SystemsRICHARDОценок пока нет
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerДокумент12 страниц16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsОценок пока нет
- Arduino DC Motor Control Using L298N Motor DriverДокумент3 страницыArduino DC Motor Control Using L298N Motor DriverSONA100% (1)
- Control of Automated Guided Vehicle With PLC Simatic Et200S CpuДокумент6 страницControl of Automated Guided Vehicle With PLC Simatic Et200S CpuHo Van RoiОценок пока нет
- Arm Cortex (LPC 2148) Based Motor Speed ControlДокумент25 страницArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (1)
- DC Motor Speed Control With PIC MicrocontrollerДокумент4 страницыDC Motor Speed Control With PIC MicrocontrollerEngr Jawad Ali100% (1)
- PWM Based DC Motor Speed Control Using MicrocontrollerДокумент8 страницPWM Based DC Motor Speed Control Using MicrocontrollertazebОценок пока нет
- Advanced Three Phase PWM Inverter Control Using MicrocontrollerДокумент8 страницAdvanced Three Phase PWM Inverter Control Using MicrocontrollerAbdur Rehman TayyabОценок пока нет
- Power Systems-On-Chip: Practical Aspects of DesignОт EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardОценок пока нет
- EE 205 Circuit Theory Lab 4 3-Phase Balanced Circuit AnalysisДокумент3 страницыEE 205 Circuit Theory Lab 4 3-Phase Balanced Circuit AnalysisGürhan BekarОценок пока нет
- TOK Sample Essay 2Документ4 страницыTOK Sample Essay 2Michael SmithОценок пока нет
- Horizontal Curves: - IssueДокумент27 страницHorizontal Curves: - IssueOreonel PerezОценок пока нет
- Zone 4 - 1VB3a RC Beam Analysis & Design (EN1992)Документ18 страницZone 4 - 1VB3a RC Beam Analysis & Design (EN1992)jasekanОценок пока нет
- Class 8 - Maths - CH 12 - Exponents and PowersДокумент10 страницClass 8 - Maths - CH 12 - Exponents and PowersJitheshОценок пока нет
- Elias, Habtamu and HunegnawДокумент28 страницElias, Habtamu and HunegnaweliasОценок пока нет
- ASTM D627 07 - Standard Test Methods For Rubber Property-Heat Generation and Flexing Fatigue in CompressionДокумент7 страницASTM D627 07 - Standard Test Methods For Rubber Property-Heat Generation and Flexing Fatigue in CompressionAndre Rodriguez SpirimОценок пока нет
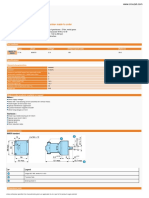
- 5 NM RC65 10 and 17 Watts 17 W Part Number Made To OrderДокумент3 страницы5 NM RC65 10 and 17 Watts 17 W Part Number Made To OrderasdasdghtОценок пока нет
- 4893-Article Text-18187-1-10-20220930 - 012751Документ7 страниц4893-Article Text-18187-1-10-20220930 - 012751Tokiwa SougoОценок пока нет
- Installation and Operations Manual: 6700 Liquid Level IndicatorДокумент52 страницыInstallation and Operations Manual: 6700 Liquid Level IndicatorjosОценок пока нет
- 12A ''Metallic Bonding & Giant Metallic Structures'Документ31 страница12A ''Metallic Bonding & Giant Metallic Structures'Uncharted FireОценок пока нет
- Electro ChemistryДокумент25 страницElectro Chemistrytpvv sreenivasaraoОценок пока нет
- Auto Selection of Any Available Phase, in 3 Phase Supply SystemДокумент9 страницAuto Selection of Any Available Phase, in 3 Phase Supply Systemmosub fudolОценок пока нет
- EHV AC & DC TRANSMISSION MCQ Unit - 2 - Math TradersДокумент5 страницEHV AC & DC TRANSMISSION MCQ Unit - 2 - Math TradersRit100% (1)
- WS2 GP2 Q3 Pelina JTДокумент11 страницWS2 GP2 Q3 Pelina JTJohn Tristan HilaОценок пока нет
- Lesson 1: Illustrating The Different Types of Conic Sections, Defining A Circle and Determining The Equation of A Circle in Standard FormДокумент6 страницLesson 1: Illustrating The Different Types of Conic Sections, Defining A Circle and Determining The Equation of A Circle in Standard FormanneОценок пока нет
- Advanced-Chem Q1Документ100 страницAdvanced-Chem Q1Julie Ann CotaraОценок пока нет
- Virtual Lecture - 1-Introduction-TurbomachineДокумент48 страницVirtual Lecture - 1-Introduction-TurbomachineRukmani Devi100% (2)
- Parker Chomerics CHO-FOIL-CHO-FAB Conductive TapeДокумент2 страницыParker Chomerics CHO-FOIL-CHO-FAB Conductive TapeAlexandreОценок пока нет
- Norgren 05regulators PDFДокумент19 страницNorgren 05regulators PDFTta EngineeringОценок пока нет
- For NA EU WB37 Intelligent Battery Safety Guidelines v1.0Документ27 страницFor NA EU WB37 Intelligent Battery Safety Guidelines v1.0ramon romahnОценок пока нет
- Acoustics Report: Evaluation and Mitigation of Airborne and Structure-Borne Noise Emitted by 3D PrinterДокумент34 страницыAcoustics Report: Evaluation and Mitigation of Airborne and Structure-Borne Noise Emitted by 3D PrinterAwan AJaОценок пока нет
- EPM - 07 - 07S - Manual - ENTESДокумент4 страницыEPM - 07 - 07S - Manual - ENTESAhmed Mohamed Kamal El-DeenОценок пока нет
- Applications of The Definite Integral in Geometry, Science, and EngineeringДокумент9 страницApplications of The Definite Integral in Geometry, Science, and EngineeringZain MohammedОценок пока нет
- Solution ChemistryДокумент27 страницSolution ChemistryZarahbeth Claire G. ArcederaОценок пока нет
- Pipe Calculations PDFДокумент11 страницPipe Calculations PDFomar mahmoudОценок пока нет
- HTTPSCDN - Savemyexams.co - Ukuploads201806June 2017 2PR Rms IGCSE Edexcel Physics PDFДокумент12 страницHTTPSCDN - Savemyexams.co - Ukuploads201806June 2017 2PR Rms IGCSE Edexcel Physics PDFLeman KasapОценок пока нет
- Tutorial 3 Q&A-1Документ30 страницTutorial 3 Q&A-1Hilb KelbОценок пока нет