Вам также может понравиться
- SimulationДокумент13 страницSimulationGojjam LibayОценок пока нет
- 2002-Development of A Mechanism For Transplanting Rice Seedlings-ThomasДокумент16 страниц2002-Development of A Mechanism For Transplanting Rice Seedlings-ThomasHari Simha100% (2)
- International Journal of Engineering Research and Development (IJERD)Документ9 страницInternational Journal of Engineering Research and Development (IJERD)IJERDОценок пока нет
- Coco Yam HarvesterДокумент8 страницCoco Yam HarvesterTANKO BAKOОценок пока нет
- Wa0028Документ8 страницWa0028vikalpОценок пока нет
- Development of Design and Investigation of Operation Processes of Small-Scale Root Crop and Potato HarvestersДокумент10 страницDevelopment of Design and Investigation of Operation Processes of Small-Scale Root Crop and Potato HarvestersKenn MendozaОценок пока нет
- Design of Power Weeder For Low Land Paddy Cultivation PDFДокумент8 страницDesign of Power Weeder For Low Land Paddy Cultivation PDFBOSS BOSS100% (1)
- Prototype Grading Cereal CorpsДокумент16 страницPrototype Grading Cereal Corpstaufiq hidОценок пока нет
- Literature Review On Automatic Seed FeederДокумент4 страницыLiterature Review On Automatic Seed FeederMani KarthikeyanОценок пока нет
- Design of Rice Transplanting Machine For Local Farmers in North CotabatoДокумент5 страницDesign of Rice Transplanting Machine For Local Farmers in North CotabatoJosafat BaylosisОценок пока нет
- Thesis Final Proposal PresentationДокумент25 страницThesis Final Proposal Presentationkibromkb100% (1)
- Design Construction and Evaluation of Potato DiggeДокумент10 страницDesign Construction and Evaluation of Potato DiggeAmeer BA-faiadhОценок пока нет
- 9th Agricultural Engineering Scientists Meet 2021Документ62 страницы9th Agricultural Engineering Scientists Meet 2021gsuresh40Оценок пока нет
- .Design and Fabrication of Multipurpose Agriculture VehicleДокумент6 страниц.Design and Fabrication of Multipurpose Agriculture VehicleAbhishek SharmaОценок пока нет
- Energies 12 02774Документ14 страницEnergies 12 02774beselamuОценок пока нет
- Design and Development of Cassava Planting MachineДокумент6 страницDesign and Development of Cassava Planting Machinejohn lester benignoОценок пока нет
- On An Automated Headland Turn of Wide Width Air Seeders: Conference PaperДокумент9 страницOn An Automated Headland Turn of Wide Width Air Seeders: Conference PaperhenrengОценок пока нет
- Development and Performance Evaluation of Carrot WДокумент5 страницDevelopment and Performance Evaluation of Carrot WRafael SantosОценок пока нет
- Cocoyam HarvesterДокумент10 страницCocoyam HarvesterZewdu AbdiОценок пока нет
- Pengembangan Mesin Penanam Dan Pemupuk Jagung Terintegrasi Dengan Pengolahan Tanah Alur PDFДокумент8 страницPengembangan Mesin Penanam Dan Pemupuk Jagung Terintegrasi Dengan Pengolahan Tanah Alur PDFarfandiОценок пока нет
- Vol 3 No 2 2015 PDFДокумент80 страницVol 3 No 2 2015 PDFAbd Hakim MakassarОценок пока нет
- A New Thresher ArticleДокумент12 страницA New Thresher ArticleAdil KhawajaОценок пока нет
- Agricultural Machinery and Farm Power Engineering Case Team: OromiaДокумент14 страницAgricultural Machinery and Farm Power Engineering Case Team: OromiaRebira W AgaОценок пока нет
- Design Analysis of A Mechanical Rice TransplanterДокумент7 страницDesign Analysis of A Mechanical Rice TransplanterSaif KhanОценок пока нет
- Design and Analysis of Automatic Seed Sowing MachineДокумент64 страницыDesign and Analysis of Automatic Seed Sowing MachinePENTAMALLA HARIHARANОценок пока нет
- Development and Performance Evaluation of Animal Drawn Manure Spreader For Organic FarmingДокумент16 страницDevelopment and Performance Evaluation of Animal Drawn Manure Spreader For Organic Farmingnikhil moreОценок пока нет
- Report Tapioca HarvestingДокумент42 страницыReport Tapioca HarvestingAmal NirmalОценок пока нет
- Rice Seeder Development (For Research)Документ12 страницRice Seeder Development (For Research)MACLIОценок пока нет
- Agriculture 11 00088 v3Документ14 страницAgriculture 11 00088 v3Gojjam LibayОценок пока нет
- Performance Evaluation of New Sugarcane Peeling Machine PrototypeДокумент10 страницPerformance Evaluation of New Sugarcane Peeling Machine PrototypeOdior EmmanuelОценок пока нет
- Development of A Portable Pneumatic Grain Broadcasting Unit: Ahmad, M. CДокумент8 страницDevelopment of A Portable Pneumatic Grain Broadcasting Unit: Ahmad, M. CMariana VictoriaОценок пока нет
- Perbaikan Desain Mesin Penanam Dan Pemupuk Jagung Bertenaga Traktor TanganДокумент10 страницPerbaikan Desain Mesin Penanam Dan Pemupuk Jagung Bertenaga Traktor TanganazizahОценок пока нет
- IJASR - Field and Economic Studies of Tractor Operated Manure SpreadeДокумент10 страницIJASR - Field and Economic Studies of Tractor Operated Manure SpreadeTJPRC PublicationsОценок пока нет
- Vol20No4 OltДокумент13 страницVol20No4 OltAkiraKurusu69Оценок пока нет
- Seed Growing 1Документ18 страницSeed Growing 1Sandeep ArduОценок пока нет
- G6 Proposal UpdatedДокумент12 страницG6 Proposal Updated20013122-001Оценок пока нет
- Optimization of Picker-Husker Harvesting Losses in Corn Seed Pplication of Response Surface Methodology ForДокумент9 страницOptimization of Picker-Husker Harvesting Losses in Corn Seed Pplication of Response Surface Methodology ForChristian M. MortelОценок пока нет
- Department of Mechanical Engineering, Sait, Bangalore - 560 097Документ9 страницDepartment of Mechanical Engineering, Sait, Bangalore - 560 097Bruno Joe KenОценок пока нет
- Development A Feeding Mechanism of Chopper For Chopping Sugarcane BagasseДокумент19 страницDevelopment A Feeding Mechanism of Chopper For Chopping Sugarcane BagassedansihОценок пока нет
- ScreeningДокумент16 страницScreeningMohammed AlnasharОценок пока нет
- Vinayak PDFДокумент5 страницVinayak PDFrajput sunilОценок пока нет
- Litrature ReviewДокумент5 страницLitrature ReviewHAIMANOTОценок пока нет
- Evaluation Hammer Mill MaizeДокумент25 страницEvaluation Hammer Mill MaizeAntonio MoncayoОценок пока нет
- Soil Dynamics in TillageДокумент14 страницSoil Dynamics in Tillagerevange2112Оценок пока нет
- A Mini Rice Processing Machine For Nigerian Farmers: I.K. Adegun, S.A. Adepoju and J.A. AwedaДокумент10 страницA Mini Rice Processing Machine For Nigerian Farmers: I.K. Adegun, S.A. Adepoju and J.A. AwedavishalmechieОценок пока нет
- Development and Evaluation of Small-Scale Power Weeder: Misr Journal of Agricultural Engineering July 2014Документ27 страницDevelopment and Evaluation of Small-Scale Power Weeder: Misr Journal of Agricultural Engineering July 2014Raval DhruvОценок пока нет
- Modification and Analysis of Crop Cultivating MachineДокумент11 страницModification and Analysis of Crop Cultivating MachinesingamОценок пока нет
- Agricultural Robot: SmallpoxДокумент116 страницAgricultural Robot: SmallpoxSundas SoomroОценок пока нет
- Thresher-Literature ReviewДокумент37 страницThresher-Literature ReviewAdil Khawaja80% (5)
- Development and Performance Evaluation of A Three Rollers Acha (Digitaria Exilis) Dehusking MachineДокумент11 страницDevelopment and Performance Evaluation of A Three Rollers Acha (Digitaria Exilis) Dehusking MachineAZOJETE100% (1)
- Development and Evaluation of Pick Positioner For Fruit Harvesting and Tree PruningДокумент5 страницDevelopment and Evaluation of Pick Positioner For Fruit Harvesting and Tree PruningAnkitОценок пока нет
- Agriculture 07 00100 v2Документ9 страницAgriculture 07 00100 v2hamed soleymaniОценок пока нет
- Planters Performance During A Very Short Rotation Coppice PlantingДокумент5 страницPlanters Performance During A Very Short Rotation Coppice PlantingsantiagoОценок пока нет
- Design and Evaluation of Crushing Hammer Mill: January 2019Документ25 страницDesign and Evaluation of Crushing Hammer Mill: January 2019ppd9890Оценок пока нет
- Development and Performance Evaluation of A Two-Row Mechanical Paddy TransplanterДокумент6 страницDevelopment and Performance Evaluation of A Two-Row Mechanical Paddy TransplanterSapuniiОценок пока нет
- Development and Evaluation of Small-Scale Power Weeder: R. A. Hegazy I. A. Abdelmotaleb Z. M. Imara M. H. OkashaДокумент26 страницDevelopment and Evaluation of Small-Scale Power Weeder: R. A. Hegazy I. A. Abdelmotaleb Z. M. Imara M. H. OkashaRamesh SahniОценок пока нет
- 207Документ7 страниц207varshitОценок пока нет
- The Machinery of Grain Production - With Information on Threshing, Seeding and Repairing the Machinery of Grain Production on the FarmОт EverandThe Machinery of Grain Production - With Information on Threshing, Seeding and Repairing the Machinery of Grain Production on the FarmОценок пока нет
- Conservation Agriculture: Training Guide for Extension Agents and Farmers in Eastern Europe and Central AsiaОт EverandConservation Agriculture: Training Guide for Extension Agents and Farmers in Eastern Europe and Central AsiaОценок пока нет
- Farm Machinery and Equipment : Improving Productivity in the FieldОт EverandFarm Machinery and Equipment : Improving Productivity in the FieldОценок пока нет
- Solar Panels Cleaning System ReportДокумент26 страницSolar Panels Cleaning System Reportpramo_dass0% (2)
- Disc Brake-ReportДокумент51 страницаDisc Brake-Reportpramo_dass100% (2)
- 4 - Stresses Due To Shrink Fit Between 2 CylindersДокумент4 страницы4 - Stresses Due To Shrink Fit Between 2 Cylinderspramo_dassОценок пока нет
- Project Report On Robotic ArmДокумент8 страницProject Report On Robotic Armpramo_dassОценок пока нет
- Background of The StudyДокумент17 страницBackground of The Studypramo_dassОценок пока нет
- Connecting RodДокумент36 страницConnecting Rodpramo_dass0% (1)
- Clutch Palte - 1Документ48 страницClutch Palte - 1pramo_dassОценок пока нет
- Arm Move FixedДокумент45 страницArm Move Fixedpramo_dassОценок пока нет
- Wiper Motor SensorДокумент68 страницWiper Motor Sensorpramo_dassОценок пока нет
- Comparative Study Of"Connecting Rod by Finite Element Analysis Using Composite Materials"Документ38 страницComparative Study Of"Connecting Rod by Finite Element Analysis Using Composite Materials"pramo_dassОценок пока нет
- Advanced Android Controlled Pick and Place Robotic ARM Using Bluetooth TechnologyДокумент9 страницAdvanced Android Controlled Pick and Place Robotic ARM Using Bluetooth Technologypramo_dassОценок пока нет
- 360 Degree Fire Fighting Protection SystemДокумент20 страниц360 Degree Fire Fighting Protection Systempramo_dass100% (5)
- Group 7 Robotic ArmДокумент39 страницGroup 7 Robotic Armpramo_dassОценок пока нет
- Plagiarism Checker X Originality Report: Similarity Found: 30%Документ7 страницPlagiarism Checker X Originality Report: Similarity Found: 30%pramo_dassОценок пока нет
- Wheel MachineДокумент114 страницWheel Machinepramo_dassОценок пока нет
- Design and Fabrication of An Automatic Window Cleaning RobotДокумент6 страницDesign and Fabrication of An Automatic Window Cleaning Robotpramo_dassОценок пока нет
- ProjectarsДокумент36 страницProjectarspramo_dassОценок пока нет
- Vrtical ImpellerДокумент63 страницыVrtical Impellerpramo_dassОценок пока нет
- Study On Mechanical Behaviour of Banana Fiber Reinforced Epoxy CompositesДокумент30 страницStudy On Mechanical Behaviour of Banana Fiber Reinforced Epoxy Compositespramo_dassОценок пока нет
- Design and Development of A Tomato Slicing MachineДокумент7 страницDesign and Development of A Tomato Slicing Machinepramo_dassОценок пока нет
- Planning Analysis and Designing of ShoppДокумент63 страницыPlanning Analysis and Designing of Shopppramo_dass100% (1)
- Al - Metal MatrixДокумент38 страницAl - Metal Matrixpramo_dassОценок пока нет
- Report 1Документ50 страницReport 1pramo_dassОценок пока нет
- New Concept of WheelchairДокумент32 страницыNew Concept of Wheelchairpramo_dassОценок пока нет
- Rim Design CompositeДокумент28 страницRim Design Compositepramo_dassОценок пока нет
- Finite Element Analysis On Hybrid Composite Wheel RimДокумент11 страницFinite Element Analysis On Hybrid Composite Wheel Rimpramo_dassОценок пока нет
- Cleaning and PainitngДокумент36 страницCleaning and Painitngpramo_dassОценок пока нет
- Experimental and Numerical Analysis of Different Aerodynamic Properties of Circular CylinderДокумент6 страницExperimental and Numerical Analysis of Different Aerodynamic Properties of Circular Cylinderpramo_dassОценок пока нет
- Chapter-1: Automatic Rain Wiper SystemДокумент54 страницыChapter-1: Automatic Rain Wiper Systempramo_dassОценок пока нет
- Checklist: I. Q & A II. Ôn tập QuizzesДокумент19 страницChecklist: I. Q & A II. Ôn tập QuizzesLê Hoàng Minh ThưОценок пока нет
- New Product Development ProcessДокумент12 страницNew Product Development ProcessAyushi SinghОценок пока нет
- Licture 1 - Urban DevelopmentДокумент22 страницыLicture 1 - Urban DevelopmentSemira HusenОценок пока нет
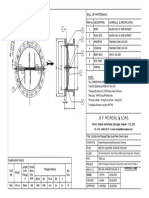
- Dual Plate 800 NB-ModelДокумент1 страницаDual Plate 800 NB-ModelTanmoy DuttaОценок пока нет
- Pump Control (Main Hydraulic) - Main Pump RegulatorДокумент13 страницPump Control (Main Hydraulic) - Main Pump RegulatorThein Htoon lwin100% (1)
- A Systematic Review of The Clinical Effectiveness and Cost-Effectiveness of Sensory, Psychological and Behavioural Interventions For Managing Agitation in Older Adults With DementiaДокумент256 страницA Systematic Review of The Clinical Effectiveness and Cost-Effectiveness of Sensory, Psychological and Behavioural Interventions For Managing Agitation in Older Adults With DementiaastrogliaОценок пока нет
- Working With ComplexityДокумент7 страницWorking With ComplexitychoileoОценок пока нет
- Predominance Area DiagramДокумент5 страницPredominance Area Diagramnaresh naikОценок пока нет
- Asm International: Fall / Winter 2019 - 2020 CATALOGДокумент32 страницыAsm International: Fall / Winter 2019 - 2020 CATALOGChoice OrganoОценок пока нет
- Participatory Irrigation Sector Project (Pisp)Документ35 страницParticipatory Irrigation Sector Project (Pisp)Maman Rustaman100% (1)
- 4) Findings and Recommendations and Conclusions-OkkДокумент15 страниц4) Findings and Recommendations and Conclusions-OkkAshiqur RahmanОценок пока нет
- The Mindset of Focusing For Success - Jane HolderДокумент19 страницThe Mindset of Focusing For Success - Jane HoldermehtavinОценок пока нет
- Anaximenes (D. 528 BCE) : 1. Doctrine of AirДокумент6 страницAnaximenes (D. 528 BCE) : 1. Doctrine of AirEvoline LimОценок пока нет
- Aeronautics: Aeronautical Calculations: What's With All Those Coefficients Anyway?Документ2 страницыAeronautics: Aeronautical Calculations: What's With All Those Coefficients Anyway?Baldev RamОценок пока нет
- Lyapunov Function - Dynamical SystemsДокумент4 страницыLyapunov Function - Dynamical SystemsmCmAlОценок пока нет
- Pengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Документ8 страницPengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Adi IndraОценок пока нет
- 985 AIME ProblemsДокумент10 страниц985 AIME ProblemsSarah Joy ManimtimОценок пока нет
- Employee Quality Awareness Training: Presented byДокумент11 страницEmployee Quality Awareness Training: Presented byJayant Kumar JhaОценок пока нет
- Position, Velocity and AccelerationДокумент12 страницPosition, Velocity and AccelerationawbОценок пока нет
- Aa - Spec - 538011 Medium Voltage Induction MotorsДокумент32 страницыAa - Spec - 538011 Medium Voltage Induction Motorsjonodo89Оценок пока нет
- Data Science Assignment 01Документ4 страницыData Science Assignment 01Abdul MAalikОценок пока нет
- Aria Soho Fdom Is02Документ213 страницAria Soho Fdom Is02cipcigan danutОценок пока нет
- SGFL MCQ Part SolutionДокумент2 страницыSGFL MCQ Part SolutionSudipto RoyОценок пока нет
- Cygnet Corporate Profile 2019Документ18 страницCygnet Corporate Profile 2019AkashОценок пока нет
- Power Imbalance Issues in AdvertisingДокумент22 страницыPower Imbalance Issues in AdvertisingIonut IugaОценок пока нет
- Scope and Sequence: Let's Start With ArtДокумент4 страницыScope and Sequence: Let's Start With ArtPhương MaiОценок пока нет
- Digital Communication Lab Report: Experiment Number 7Документ9 страницDigital Communication Lab Report: Experiment Number 7Saketh RaviralaОценок пока нет
- Podcast ProjectДокумент10 страницPodcast Projectmiskinmusic123Оценок пока нет
- Finrl: Deep Reinforcement Learning Framework To Automate Trading in Quantitative FinanceДокумент9 страницFinrl: Deep Reinforcement Learning Framework To Automate Trading in Quantitative FinancegyhtujrtyОценок пока нет
- SalomeMeca AsterODactyleДокумент161 страницаSalomeMeca AsterODactyleIwan Sanjaya AwaluddinОценок пока нет