Вам также может понравиться
- Posições Relativas Entre Duas RetasДокумент16 страницPosições Relativas Entre Duas RetasIt's PedrowОценок пока нет
- Laboratório 1 de Física - Medidas, Erros e Incertezas - MesaДокумент12 страницLaboratório 1 de Física - Medidas, Erros e Incertezas - MesaLeanne AlvesОценок пока нет
- Produto Vetorial e Tensor LeviCivitaДокумент3 страницыProduto Vetorial e Tensor LeviCivitaHelisioОценок пока нет
- 01 FisicaДокумент185 страниц01 FisicaAntônio Leote NetoОценок пока нет
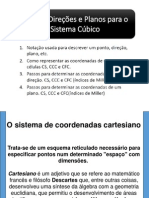
- Aula 7 - Planos e Direções CristalográficasДокумент57 страницAula 7 - Planos e Direções CristalográficasEberson Julio Magalhães100% (1)
- FÍSICA APOSTILA 1 INTRODUÇÃO À FÍSICA E TERMOLOGIA. Prof . - LUCIANA LESSA PDFДокумент29 страницFÍSICA APOSTILA 1 INTRODUÇÃO À FÍSICA E TERMOLOGIA. Prof . - LUCIANA LESSA PDFADRIANO DE CARVALHO DUARTE0% (1)
- Estrutura Cristalina - Cap 3Документ130 страницEstrutura Cristalina - Cap 3LorenaОценок пока нет
- Apoio 10 - Álgebra Linear IДокумент22 страницыApoio 10 - Álgebra Linear IvalesternoОценок пока нет
- A História Da Geometria: Da Plana A Espacial e Suas TecnologiasДокумент13 страницA História Da Geometria: Da Plana A Espacial e Suas TecnologiasRicardo LedurОценок пока нет
- Aulas de Análise MatemáticaДокумент396 страницAulas de Análise MatemáticaRafa BenitezОценок пока нет
- 1 Lista de Termodinâmica - 2019.2 PDFДокумент10 страниц1 Lista de Termodinâmica - 2019.2 PDFkaio tavaresОценок пока нет
- ObmepДокумент2 840 страницObmepJoão Pedro LainoОценок пока нет
- VetoresДокумент4 страницыVetoresArthur Heitor da motta tenórioОценок пока нет
- REMA - Aula 9 - Características Geométricas Das Figuras Planas PDFДокумент6 страницREMA - Aula 9 - Características Geométricas Das Figuras Planas PDFGuilhermeCarmoОценок пока нет
- Movimento Harmônico Simples (MHS)Документ13 страницMovimento Harmônico Simples (MHS)Dias DiasОценок пока нет
- Comprimento de Arco IДокумент3 страницыComprimento de Arco IdrianqueirozОценок пока нет
- Ação de Campos Magnéticos Sobre Cargas em MovimentoДокумент20 страницAção de Campos Magnéticos Sobre Cargas em MovimentodОценок пока нет
- Aula05 Capitulo3 AnaliseVetorial - 2021Документ18 страницAula05 Capitulo3 AnaliseVetorial - 2021Iago Tsukayama100% (1)
- m6 Campo GravíticoДокумент29 страницm6 Campo GravíticoJosé CoelhoОценок пока нет
- Retas e Planos PDFДокумент60 страницRetas e Planos PDFrock640Оценок пока нет
- Pendulo SimplesДокумент1 страницаPendulo SimplesYamba António Mfulu QIОценок пока нет
- Cronograma Fuvest 2021Документ65 страницCronograma Fuvest 2021Nicoly MoretoОценок пока нет
- Historia Dos LogaritmosДокумент17 страницHistoria Dos LogaritmosErika FloresОценок пока нет
- AnaliseMatematica1 20122013 Albuquerque PDFДокумент23 страницыAnaliseMatematica1 20122013 Albuquerque PDFEdmilson PedroОценок пока нет
- Raizes Quadrada e Cubica RESUMOДокумент5 страницRaizes Quadrada e Cubica RESUMOAnita CordeiroОценок пока нет
- Aula 16. Comprimento e Área Do CírculoДокумент8 страницAula 16. Comprimento e Área Do CírculosgtleonardoОценок пока нет
- Fisica PriДокумент4 страницыFisica PriSoso MuitasОценок пока нет
- Campos EscalaresДокумент13 страницCampos EscalaresolafpalmerОценок пока нет
- Resumo de Superfícies Quádricas e ExercíciosДокумент3 страницыResumo de Superfícies Quádricas e Exercícioskimtostes50% (2)
- Sugestão de Sequência Didática para Ensino de Vetores - 9º AnoДокумент48 страницSugestão de Sequência Didática para Ensino de Vetores - 9º AnoAdeilde Correia Souza0% (1)
- Relatório 7Документ7 страницRelatório 7MatheusОценок пока нет
- Dedução Da Lei Snell-Descartes e Equação Das LentesДокумент3 страницыDedução Da Lei Snell-Descartes e Equação Das LentesDiogo Buss0% (1)
- 2-Principios Da EletrostaticaДокумент8 страниц2-Principios Da Eletrostatica8dori19100% (1)
- Magnetismo e OndulatóriaДокумент14 страницMagnetismo e OndulatóriaLeonardo MardeganОценок пока нет
- Apostila de Lab. de Física Moderna IIДокумент31 страницаApostila de Lab. de Física Moderna IIMarco Aurélio Da SilvaОценок пока нет
- A Notação de DiracДокумент5 страницA Notação de DiracrobertofigueiraОценок пока нет
- Leis de NewtonДокумент29 страницLeis de NewtonFernanda SalesОценок пока нет
- Pendulo Simples RoteiroДокумент4 страницыPendulo Simples RoteiroAugusto NeresОценок пока нет
- 01 - Relatório - Reta em Papel Milimetrado, Monolog e DilogДокумент9 страниц01 - Relatório - Reta em Papel Milimetrado, Monolog e DilogFelipe Portilho SilvaОценок пока нет
- Exercícios Resolvidos Fisíca I - RotaçãoДокумент9 страницExercícios Resolvidos Fisíca I - RotaçãoLarissa PОценок пока нет
- 150074-LISTA 4 - Movimento em Duas e Três DimensõesДокумент3 страницы150074-LISTA 4 - Movimento em Duas e Três DimensõesGabriela nauarОценок пока нет
- Relatorio de Fisica 3 - Medida de Tensão Contínua - NILTONДокумент8 страницRelatorio de Fisica 3 - Medida de Tensão Contínua - NILTONAlexandre Carvalho BuenoОценок пока нет
- Trabalho de Fisica Equações de Maxwell PDFДокумент13 страницTrabalho de Fisica Equações de Maxwell PDFÉrica VictorОценок пока нет
- Produto Vetorial e Produto EscalarДокумент5 страницProduto Vetorial e Produto EscalarBrian I. Kate100% (1)
- 02 - Aula Turma 203 - Progressão Aritmética (PA)Документ5 страниц02 - Aula Turma 203 - Progressão Aritmética (PA)maxyОценок пока нет
- EletromagnetismoДокумент26 страницEletromagnetismoEduardoОценок пока нет
- Aula 11 Carga AxialДокумент31 страницаAula 11 Carga AxialMarcelo LiraОценок пока нет
- VetoresДокумент8 страницVetoresValdiélio Menezes100% (1)
- Fisica Moderna Exercicios Renato BritoДокумент2 страницыFisica Moderna Exercicios Renato Britopepeu908Оценок пока нет
- Lista 2 MGT 2020 2Документ3 страницыLista 2 MGT 2020 2Ueverton FreireОценок пока нет
- Plano Anual de Física - 2º AnoДокумент7 страницPlano Anual de Física - 2º AnoJoão Filho100% (3)
- Lista - Estatística DescritivaДокумент8 страницLista - Estatística DescritivaPitaccus LoreОценок пока нет
- Físic 2 Acs 2020 PDFДокумент20 страницFísic 2 Acs 2020 PDFPedro Rafael Afonso AfonsoОценок пока нет
- Matemática - Aula 35 - CircunferênciaДокумент12 страницMatemática - Aula 35 - Circunferênciaapi-3713096Оценок пока нет
- Apostila - Constituição Das Ligas MetálicasДокумент9 страницApostila - Constituição Das Ligas MetálicasJulio cesarОценок пока нет
- Diagrama Trajeto PassoДокумент4 страницыDiagrama Trajeto PassoJulio cesarОценок пока нет
- Usinabilidade Dos AcosДокумент12 страницUsinabilidade Dos AcosJulio cesarОценок пока нет
- Caract Usinagem Torneamento CompletoДокумент137 страницCaract Usinagem Torneamento CompletoJulio cesarОценок пока нет
- Apostila - Diagramas de FasesДокумент14 страницApostila - Diagramas de FasesJulio cesarОценок пока нет
- Analise Critica - Projeto de HidraulicaДокумент2 страницыAnalise Critica - Projeto de HidraulicaJulio cesarОценок пока нет
- Apostila - Propriedades e Ensaios DiversosДокумент14 страницApostila - Propriedades e Ensaios DiversosJulio cesarОценок пока нет
- Apostila - Análise de Estruturas CristalinasДокумент11 страницApostila - Análise de Estruturas CristalinasJulio cesarОценок пока нет
- Apostila - Plasticidade Dos Metais PDFДокумент31 страницаApostila - Plasticidade Dos Metais PDFJulio cesarОценок пока нет
- Apostila - Coordenação AtomicaДокумент7 страницApostila - Coordenação AtomicaJulio cesarОценок пока нет
- Apostila - Estruturas Cristalinas PDFДокумент19 страницApostila - Estruturas Cristalinas PDFJulio cesarОценок пока нет
- Apostila - Exercicios - Tração - ResoluçãoДокумент6 страницApostila - Exercicios - Tração - ResoluçãoJulio cesarОценок пока нет
- Apostila - Plasticidade Dos Metais PDFДокумент31 страницаApostila - Plasticidade Dos Metais PDFJulio cesarОценок пока нет
- Apostila - Ligações QuímicasДокумент7 страницApostila - Ligações QuímicasJulio cesarОценок пока нет
- Apostila - DurezaДокумент14 страницApostila - DurezaJulio cesarОценок пока нет
- Apostila - Estrutura AtomicaДокумент5 страницApostila - Estrutura AtomicaJulio cesarОценок пока нет
- Apostila - Estrutura AtomicaДокумент5 страницApostila - Estrutura AtomicaJulio cesarОценок пока нет
- Apostila - DurezaДокумент14 страницApostila - DurezaJulio cesarОценок пока нет
- Apostila - Choque e Tenacidade Ao ChoqueДокумент11 страницApostila - Choque e Tenacidade Ao ChoqueJulio cesarОценок пока нет
- Apostila - Propriedades e Ensaios DiversosДокумент14 страницApostila - Propriedades e Ensaios DiversosJulio cesarОценок пока нет
- Apostila - DobramentoДокумент8 страницApostila - DobramentoJulio cesarОценок пока нет
- Apostila - CompressãoДокумент4 страницыApostila - CompressãoJulio cesarОценок пока нет
- Apostila - Choque e Tenacidade Ao ChoqueДокумент11 страницApostila - Choque e Tenacidade Ao ChoqueJulio cesarОценок пока нет
- Apostila - Ligações QuímicasДокумент7 страницApostila - Ligações QuímicasJulio cesarОценок пока нет
- Apostila - Exercicios - TraçãoДокумент3 страницыApostila - Exercicios - TraçãoJulio cesarОценок пока нет
- Apostila - TraçãoДокумент16 страницApostila - TraçãoJulio cesarОценок пока нет
- Apostila - Propriedades Dos MateriaisДокумент7 страницApostila - Propriedades Dos MateriaisJulio cesarОценок пока нет
- Apostila - Introdução Ao Estudo Dos MateriaisДокумент18 страницApostila - Introdução Ao Estudo Dos MateriaisJulio cesarОценок пока нет
- Apostila - Propriedades MecânicasДокумент5 страницApostila - Propriedades MecânicasJulio cesarОценок пока нет
- Lista de Exercícios - Grandezas VetoriaisДокумент5 страницLista de Exercícios - Grandezas VetoriaisMaico Stoichicov Borges OliveiraОценок пока нет
- Georreferenciamento ApostilaДокумент35 страницGeorreferenciamento ApostilaJobeiОценок пока нет
- Vet orДокумент7 страницVet orThiago Barbosa SoaresОценок пока нет
- Noções de Cálculo Vetorial Prof. Alberto RicardoДокумент16 страницNoções de Cálculo Vetorial Prof. Alberto Ricardojamel51Оценок пока нет
- Notas de Aula - Geometria - Riemanniana - Rodney Josué BiezunerДокумент152 страницыNotas de Aula - Geometria - Riemanniana - Rodney Josué BiezunerJulioОценок пока нет
- Lista 1 - GAAL - 2017.1Документ7 страницLista 1 - GAAL - 2017.1Diêgo MarcosОценок пока нет
- Operadores Auto-AdjuntosДокумент24 страницыOperadores Auto-AdjuntossaraОценок пока нет
- Lista 04 - Vetores No Plano e No EspaçoДокумент2 страницыLista 04 - Vetores No Plano e No Espaçov7464cfwb6Оценок пока нет
- Estabilidade Lyapunov PDFДокумент92 страницыEstabilidade Lyapunov PDFSaraJorgeESilvaОценок пока нет
- Esbolço ProvaДокумент2 страницыEsbolço ProvathiagoccnunesОценок пока нет
- Capitulo 2 - Estática Dos Pontos MateriaisДокумент55 страницCapitulo 2 - Estática Dos Pontos MateriaisGuilherme OsinskiОценок пока нет
- Lista 6Документ3 страницыLista 6asdfghjkl0% (1)
- Notas Algebra Linear ApostilinhaДокумент83 страницыNotas Algebra Linear ApostilinhaSamuel JanuárioОценок пока нет
- Lista3 Solucao PDFДокумент3 страницыLista3 Solucao PDFAlexandre Junior0% (1)
- Curso 11183 Aula 04 v1Документ57 страницCurso 11183 Aula 04 v1Moises CorsiОценок пока нет
- Exercc3adcios Movimento e Forc3a7a Resultante1Документ2 страницыExercc3adcios Movimento e Forc3a7a Resultante1Hyderaldo PachellyОценок пока нет
- SlidesДокумент52 страницыSlidesWillian Ricardo RitterОценок пока нет
- Fisica Semana 2-GabaritoДокумент4 страницыFisica Semana 2-Gabaritorosanagomes78Оценок пока нет
- Ometrica Analítica e Algebra LinearДокумент7 страницOmetrica Analítica e Algebra LinearIsabel PaivaОценок пока нет
- Tese 8 Ano VectoresДокумент6 страницTese 8 Ano VectoresNeuza FonsecaОценок пока нет
- Aula 11 - Resultante de Um Sistema de Forças PDFДокумент18 страницAula 11 - Resultante de Um Sistema de Forças PDFcarlosОценок пока нет
- Cálculo A Várias Variáveis IДокумент4 страницыCálculo A Várias Variáveis ILucas GuerreiroОценок пока нет
- Física 1 - Lista Ex.2Документ3 страницыFísica 1 - Lista Ex.2Amanda BartolomeusОценок пока нет
- Produto Escalar de 2 VectoresДокумент10 страницProduto Escalar de 2 VectoresTeresaCastelo-grandeОценок пока нет
- Solid Works 2007 - Moldes e MatrizesДокумент76 страницSolid Works 2007 - Moldes e MatrizesRoberto Carlos Teixeira100% (2)
- Livro Glossario de Engenharia ProducaoДокумент163 страницыLivro Glossario de Engenharia ProducaoMarcelo XavierОценок пока нет
- Mec 2Документ84 страницыMec 2Rafaela Oliveira100% (1)
- Ficha Exploratória-VetoresДокумент9 страницFicha Exploratória-VetoresGoncalo AmorimОценок пока нет
- FISICAДокумент43 страницыFISICAMonica AraujoОценок пока нет