Вам также может понравиться
- Acrolinx: Tone of VoiceДокумент12 страницAcrolinx: Tone of VoiceMark OwenОценок пока нет
- Otherhardware Updated Js2019 Clo1 Week3Документ54 страницыOtherhardware Updated Js2019 Clo1 Week3somerandomhedgehog100% (1)
- 12-2 Head CilinderДокумент8 страниц12-2 Head CilinderMilthon Solano CastroОценок пока нет
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsОт EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsРейтинг: 3.5 из 5 звезд3.5/5 (3)
- 10% Sangguniang Kabataan Youth Development Plan Barangay Guisguis 10% SK Supplemental FundДокумент3 страницы10% Sangguniang Kabataan Youth Development Plan Barangay Guisguis 10% SK Supplemental FundJan Alleana FernandezОценок пока нет
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Документ28 страницPid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- C18 OM Manual PDFДокумент116 страницC18 OM Manual PDFMommy Mimma100% (3)
- 5 Process ControlДокумент79 страниц5 Process ControlGurunath EpiliОценок пока нет
- CB Testing SCOPE Compatibility ModeДокумент58 страницCB Testing SCOPE Compatibility ModeVepty whoops100% (1)
- L3 Actuator PDFДокумент23 страницыL3 Actuator PDFharishcsharmaОценок пока нет
- Commissioning Test Auto Reclosing Paper IPTS 2013 Buayaem ENU PDFДокумент9 страницCommissioning Test Auto Reclosing Paper IPTS 2013 Buayaem ENU PDFnassarkiОценок пока нет
- Model Reference Adaptive ControlДокумент57 страницModel Reference Adaptive ControlmervebayrakОценок пока нет
- PG Maturity ModelsДокумент32 страницыPG Maturity ModelsWaleedОценок пока нет
- APC Furnace CompДокумент95 страницAPC Furnace Companju_2718Оценок пока нет
- ControlДокумент54 страницыControlaread moelОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- Basic Governer ControlsДокумент14 страницBasic Governer ControlspankajОценок пока нет
- Datta Meghe College of Engineering, AiroliДокумент39 страницDatta Meghe College of Engineering, AiroliMayuri patilОценок пока нет
- Final Ihrm AssignmentДокумент31 страницаFinal Ihrm Assignmentvidansha87% (15)
- Process Dynamics and ControlДокумент31 страницаProcess Dynamics and ControlKim Joon sungОценок пока нет
- PCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFДокумент110 страницPCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFhiralalnhpc100% (1)
- PMC 02 Process Control Fundamentals Control Loop PDFДокумент29 страницPMC 02 Process Control Fundamentals Control Loop PDFPrince PrashanthОценок пока нет
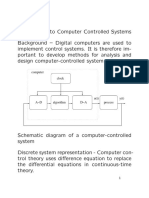
- Intro To Process ControlДокумент19 страницIntro To Process Controlenigmaticmind23Оценок пока нет
- An Introduction To Automatic ControlsДокумент43 страницыAn Introduction To Automatic ControlsPrudhvi RajОценок пока нет
- Process Dynamics and ControlДокумент32 страницыProcess Dynamics and ControlJohn Ray Clarin100% (1)
- Chapter 1 - IntroductionДокумент33 страницыChapter 1 - IntroductionHuy Nguyen LuongОценок пока нет
- PID Tuning MethodsДокумент52 страницыPID Tuning Methodsarash esfahanОценок пока нет
- I - Process-ControlДокумент79 страницI - Process-Controlenge.aqeelОценок пока нет
- Control Loop Control Loop Control Loop Control Loop: Process ProcessДокумент22 страницыControl Loop Control Loop Control Loop Control Loop: Process ProcessRonald ChavezОценок пока нет
- Chemical Process ControlДокумент36 страницChemical Process ControlWidhiyantoОценок пока нет
- Introduction To InstrumentationДокумент5 страницIntroduction To InstrumentationalijadoonОценок пока нет
- Time Response Analysis SlideДокумент13 страницTime Response Analysis SlidezahidОценок пока нет
- 5 Process Control Dec 8Документ61 страница5 Process Control Dec 8heroОценок пока нет
- Chemical and Bio-Process Control: James B. Riggs M. Nazmul KarimДокумент44 страницыChemical and Bio-Process Control: James B. Riggs M. Nazmul KarimS M Julhasnaain Jewel14% (7)
- ChE170 Lecture 9 (Control Tuning) PDFДокумент27 страницChE170 Lecture 9 (Control Tuning) PDFRowieОценок пока нет
- Unitvi Control SystemsДокумент47 страницUnitvi Control SystemsVishal SharmaОценок пока нет
- Testing FlierДокумент2 страницыTesting FlierVojaОценок пока нет
- D.C. Position ControlДокумент2 страницыD.C. Position ControlYellaji AllipilliОценок пока нет
- RT 674 Flow Level Control Demonstration Unit Gunt 1241 PDF - 1 - en GBДокумент3 страницыRT 674 Flow Level Control Demonstration Unit Gunt 1241 PDF - 1 - en GBAmarОценок пока нет
- (2016) PID Controller For Automatic Voltage Regulator Using Teaching-Learning Based Optimization TechniqueДокумент12 страниц(2016) PID Controller For Automatic Voltage Regulator Using Teaching-Learning Based Optimization Techniqueiraj FarajiОценок пока нет
- Please Give Me Your Comment in This Presentation 1639101925Документ79 страницPlease Give Me Your Comment in This Presentation 1639101925Adith Wiendar P PutraОценок пока нет
- Chapter 3 IPCДокумент53 страницыChapter 3 IPCkirubelОценок пока нет
- Process Control in Chemical Engineering by Using MatlabДокумент67 страницProcess Control in Chemical Engineering by Using MatlabedelmandalaОценок пока нет
- Final ElementДокумент17 страницFinal ElementReza SalimiОценок пока нет
- Control Chapter 7Документ33 страницыControl Chapter 7Luis GuzmánОценок пока нет
- Chapter EightДокумент35 страницChapter EightMusaabОценок пока нет
- © Career Avenues A1Документ160 страниц© Career Avenues A1Nomee PatelОценок пока нет
- Process Reaction CurveДокумент6 страницProcess Reaction Curveindra100% (1)
- Flotation Process ControlДокумент12 страницFlotation Process ControlJai Prakash PatelОценок пока нет
- Routh-Hurwitz Stability CriterionДокумент37 страницRouth-Hurwitz Stability CriterionNagajyothiVirivintiОценок пока нет
- Control Chapter 7 - RemoteДокумент47 страницControl Chapter 7 - RemoteWilliam Alejandro Contreras MaestreОценок пока нет
- PLC and Its ApplicationДокумент19 страницPLC and Its ApplicationAasshimaa TanejaОценок пока нет
- Process Reaction Curve PDFДокумент6 страницProcess Reaction Curve PDFVikalp SagarОценок пока нет
- 2&3. Digital Controller DesignДокумент75 страниц2&3. Digital Controller Design243942821Оценок пока нет
- Commissioning Numerical RelaysДокумент24 страницыCommissioning Numerical RelaysVHMANOHARОценок пока нет
- Computer ClockДокумент13 страницComputer ClockGlan DevadhasОценок пока нет
- Perform Pick Up Drop Off Test of Relay: Prepared By: B.R.PrajapatiДокумент4 страницыPerform Pick Up Drop Off Test of Relay: Prepared By: B.R.PrajapatiBhavik PrajapatiОценок пока нет
- InterfacesДокумент10 страницInterfacesManoloОценок пока нет
- Lecture1 PDFДокумент9 страницLecture1 PDFLokesh JenaОценок пока нет
- ME 475 Mechatronics: Semester: July 2015Документ13 страницME 475 Mechatronics: Semester: July 2015ফারহান আহমেদ আবীরОценок пока нет
- 38-001 Datasheet Level Flow Control ESPIAL 10 2013Документ3 страницы38-001 Datasheet Level Flow Control ESPIAL 10 2013mubashirfareedОценок пока нет
- Chapter Two: Controller PrinciplesДокумент34 страницыChapter Two: Controller PrinciplesBekaluОценок пока нет
- Control Valve Selection Guide - Valve Selection - Valve HandbookДокумент21 страницаControl Valve Selection Guide - Valve Selection - Valve Handbook2g2qscbv5pОценок пока нет
- Open Loop and Closed Loop Systems of DC MotorДокумент9 страницOpen Loop and Closed Loop Systems of DC MotorZEUS GAMINGОценок пока нет
- Che821 - Lecture NineДокумент36 страницChe821 - Lecture Nineprof.kess.unibenОценок пока нет
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsОт EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsРейтинг: 1 из 5 звезд1/5 (1)
- Efficient Optimization of BOF-dedusting: October 2014Документ12 страницEfficient Optimization of BOF-dedusting: October 2014Marcelo GuerraОценок пока нет
- Procurement Manager - Jobs SectionДокумент2 страницыProcurement Manager - Jobs Sectionxia leaderisbОценок пока нет
- Lang Ch2Документ18 страницLang Ch2Fakhir ShaheenОценок пока нет
- JDK UpgradeДокумент11 страницJDK UpgradeBhavani Ommi100% (1)
- dc7cbdbb-2a42-4703-85f0-7724d7bfb617Документ9 страницdc7cbdbb-2a42-4703-85f0-7724d7bfb617inckuxiОценок пока нет
- Annex I - Functional Requirements - Digital KioskДокумент18 страницAnnex I - Functional Requirements - Digital KioskGisela DuarteОценок пока нет
- IV B. TECH (Chemical Engineering) I SemesterДокумент14 страницIV B. TECH (Chemical Engineering) I SemesterPiyush AmbulgekarОценок пока нет
- MAKAUT 2020-2021 ODD Sem Theory Exam Schedule - All B.Tech BSC BCA and MTechДокумент84 страницыMAKAUT 2020-2021 ODD Sem Theory Exam Schedule - All B.Tech BSC BCA and MTechArpan DasОценок пока нет
- Main Relief Valve and Waste Cone - : Submittal DrawingДокумент2 страницыMain Relief Valve and Waste Cone - : Submittal Drawingumair186Оценок пока нет
- The Encyclopedia of Archival ScienceДокумент772 страницыThe Encyclopedia of Archival ScienceAfiqah NdutОценок пока нет
- Chapter27-Flight ControlДокумент84 страницыChapter27-Flight ControlIman GhОценок пока нет
- Ce Drawing QuestionsДокумент6 страницCe Drawing Questionsসন্দীপ চন্দ্রОценок пока нет
- The ROI of 3D Printing: Ultimaker White PaperДокумент13 страницThe ROI of 3D Printing: Ultimaker White PaperDarko LesoskiОценок пока нет
- Broyce Product Information V2 - 0 PDFДокумент164 страницыBroyce Product Information V2 - 0 PDFcallmenuandagmail.comОценок пока нет
- Induction Machines and Synchronous Machines Lab - Cycle 1Документ20 страницInduction Machines and Synchronous Machines Lab - Cycle 1SalmanОценок пока нет
- DSA - Ch13 - 14 - GraphДокумент83 страницыDSA - Ch13 - 14 - GraphHùng NguyễnОценок пока нет
- 5 - Network Flow ProblemsДокумент30 страниц5 - Network Flow ProblemsKaran KumarОценок пока нет
- The BBC Research Labs Frequency Shift PA Stabaliser: A Field ReportДокумент2 страницыThe BBC Research Labs Frequency Shift PA Stabaliser: A Field ReportMiftmanОценок пока нет
- The Best Printable Congratulation Certificate TemplateДокумент4 страницыThe Best Printable Congratulation Certificate TemplateMas Joe KonsultanОценок пока нет
- MI LJ24 IA DatasheetДокумент1 страницаMI LJ24 IA DatasheetFco Javier Del ÁlamoОценок пока нет
- Single Chip Karaoke Processor: DescriptionДокумент28 страницSingle Chip Karaoke Processor: DescriptionahmedОценок пока нет
- GPK2 PN 500: 2-Way High Pressure Ball ValvesДокумент4 страницыGPK2 PN 500: 2-Way High Pressure Ball ValvesRolando Jara YoungОценок пока нет
- Chapter 4 Introduction To Microwave Amplifier DesignДокумент35 страницChapter 4 Introduction To Microwave Amplifier DesignNguyễn Thái NguyênОценок пока нет