Вам также может понравиться
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFОт EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Unidad I: Introducción A La Teoría de ControlДокумент14 страницUnidad I: Introducción A La Teoría de ControlGerardoJoseHerreraVelazquezОценок пока нет
- Taller MecanismosДокумент3 страницыTaller MecanismosXavier GuillenОценок пока нет
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasОценок пока нет
- Tutoria No 1 Física GeneralДокумент64 страницыTutoria No 1 Física GeneralJairo Andres Criollo LopezОценок пока нет
- 01 Analítica de Datos en MantenimientoДокумент69 страниц01 Analítica de Datos en Mantenimientodiegomois64Оценок пока нет
- Lab 6-Cilindro de Dible EfectoДокумент2 страницыLab 6-Cilindro de Dible EfectoRoxangel AdamesОценок пока нет
- Sec 1 FisicaДокумент9 страницSec 1 Fisicaangel2 beltranОценок пока нет
- Plantilla CochaspuquioДокумент12 страницPlantilla CochaspuquioLeonardo Garro EspinozaОценок пока нет
- Ingeniería Electromecánica-Linea Del TiempoДокумент5 страницIngeniería Electromecánica-Linea Del TiempoErika HernandezОценок пока нет
- Ejercicios Resueltos de DinamicaДокумент22 страницыEjercicios Resueltos de DinamicaAlejandro IponemaОценок пока нет
- 01 Conceptos PreviosДокумент29 страниц01 Conceptos PreviosACTIVIDAD CAFE ZONA NORTEОценок пока нет
- Carlos Martinez PerezДокумент39 страницCarlos Martinez Perezmonse08Оценок пока нет
- Mecanismo ProyectoДокумент6 страницMecanismo ProyectoSantiago OrtОценок пока нет
- Corrientes de Cortocircuito - RoeperДокумент86 страницCorrientes de Cortocircuito - Roeperjsantodo_2100% (1)
- Ingenieria Claudio Mataix Mecanica de Fluidos y Maquinas Hidraulicas1 OcrДокумент345 страницIngenieria Claudio Mataix Mecanica de Fluidos y Maquinas Hidraulicas1 OcrCANDELA AVILAОценок пока нет
- Historia y La Matemática Version Ofical 2.0 Actualiacion 30 MB PromaxДокумент14 страницHistoria y La Matemática Version Ofical 2.0 Actualiacion 30 MB PromaxAlex BaltazarОценок пока нет
- Clase #3 Definición de Máquina y MecanismoДокумент38 страницClase #3 Definición de Máquina y Mecanismoboletasprimaria.uecmscОценок пока нет
- Linea TiempoДокумент1 страницаLinea TiempoGabriel BermudezОценок пока нет
- Claudio Mataix-Mecánica de Fluidos y Máquinas Hidráulicas-Ediciones Del Castillo (1986) PDFДокумент345 страницClaudio Mataix-Mecánica de Fluidos y Máquinas Hidráulicas-Ediciones Del Castillo (1986) PDFAlonso SHОценок пока нет
- Mecanica de Fluidos y Maquinas HidraulicДокумент345 страницMecanica de Fluidos y Maquinas HidraulicBrenda BarrientosОценок пока нет
- Mecanica de Fluidos Y Maquinas Hidr Aulicas Segunda EdicionДокумент27 страницMecanica de Fluidos Y Maquinas Hidr Aulicas Segunda EdicionRenatoОценок пока нет
- GIMTT U4 Cristian Urias A2.Документ12 страницGIMTT U4 Cristian Urias A2.Cristian Urias100% (1)
- (M8) Mecánica Racional - (07) Dinámica DirectaДокумент15 страниц(M8) Mecánica Racional - (07) Dinámica DirectaAgustín MartinОценок пока нет
- Fluidos - Claudio Mataix - Mecanica de Fluidos y Maquinas HidraulicasДокумент345 страницFluidos - Claudio Mataix - Mecanica de Fluidos y Maquinas Hidraulicasdavidcelesco100% (11)
- LINEA DE TIEMPO INSTRUMENTACION (Autoguardado)Документ6 страницLINEA DE TIEMPO INSTRUMENTACION (Autoguardado)Enrique GonzalezОценок пока нет
- 1 Quimica IztapalapáДокумент3 страницы1 Quimica IztapalapáANGEL ORLANDO NOGUEZ GONZALEZОценок пока нет
- Glab-02-Espinoza Vasquez Jhonatan HenryДокумент9 страницGlab-02-Espinoza Vasquez Jhonatan HenryJhonatan Henry Espinoza VasquezОценок пока нет
- Linea de TiempoДокумент1 страницаLinea de TiempoMiguel PinoОценок пока нет
- Nube de PalДокумент1 страницаNube de PalBetzabeth RamirezОценок пока нет
- 124 Shakespeare Macbeth Catedra PDFДокумент70 страниц124 Shakespeare Macbeth Catedra PDF22Arianna60% (5)
- Comprobante de DomicilioДокумент1 страницаComprobante de Domiciliofrancisco fernandezОценок пока нет
- Sahop PDFДокумент206 страницSahop PDFEduardo Aquino HipólitoОценок пока нет
- Practica No 4 Fuerza CentrifugaДокумент5 страницPractica No 4 Fuerza CentrifugaBryan STОценок пока нет
- 02 MecanismosДокумент32 страницы02 MecanismosGabriel Martinez100% (1)
- Estudio de Casos C2Документ4 страницыEstudio de Casos C2Less DrcОценок пока нет
- Colegio de Bachilleres Del Estado de YucatánДокумент2 страницыColegio de Bachilleres Del Estado de YucatánalonsoОценок пока нет
- CARTOGRAFIAДокумент106 страницCARTOGRAFIARoberto NepomucenoОценок пока нет
- Problemas de Mecánica by Marcelo Rodríguez Danta, Consuelo Bellver Cebreros PDFДокумент252 страницыProblemas de Mecánica by Marcelo Rodríguez Danta, Consuelo Bellver Cebreros PDFguillermo henrry50% (2)
- Informe Theo Janse (Velocidades y Aceleraciones)Документ6 страницInforme Theo Janse (Velocidades y Aceleraciones)Bryan YaselgaОценок пока нет
- Quimica IztapalapáДокумент3 страницыQuimica IztapalapáANGEL ORLANDO NOGUEZ GONZALEZОценок пока нет
- Antecedentes Del Calculo Diferencial - Yuritzi Estefani Serrano FloresДокумент3 страницыAntecedentes Del Calculo Diferencial - Yuritzi Estefani Serrano FloresYURITZI ESTEFANI SERRANO FLORESОценок пока нет
- Planificación Curso - Mecanica de Maquinaria - Rev 1Документ1 страницаPlanificación Curso - Mecanica de Maquinaria - Rev 1Génesis MárquezОценок пока нет
- ELECTRICIDADДокумент4 страницыELECTRICIDADRoberto EchevesteОценок пока нет
- Glab S02 Ejimeno 2018 01 FДокумент9 страницGlab S02 Ejimeno 2018 01 FAnthony Joseph Flores ObandoОценок пока нет
- Escanear 0021Документ2 страницыEscanear 0021mar ncОценок пока нет
- R1 LabDin B413Документ7 страницR1 LabDin B413Ivan HerreraОценок пока нет
- Análisis Cinemático Del Mecanismo Biela Manivela CorrederaДокумент15 страницAnálisis Cinemático Del Mecanismo Biela Manivela CorrederasamОценок пока нет
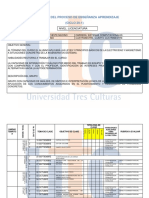
- Diseño de Procesos de ProducciónДокумент23 страницыDiseño de Procesos de ProducciónAustin OrtegaОценок пока нет
- Grupo 7 - Viernes 18-Noviembre-2021Документ36 страницGrupo 7 - Viernes 18-Noviembre-2021Austin OrtegaОценок пока нет
- Diseño Del Producto - Llamba - Montero - Ortega - Raura - Santana - VillacísДокумент35 страницDiseño Del Producto - Llamba - Montero - Ortega - Raura - Santana - VillacísAustin OrtegaОценок пока нет
- Determinacion de FallosДокумент18 страницDeterminacion de FallosAustin OrtegaОценок пока нет
- Reacciones QuimicasДокумент39 страницReacciones QuimicasAustin OrtegaОценок пока нет
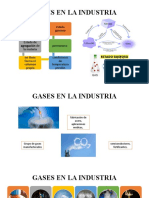
- Gases en La IndustriaДокумент3 страницыGases en La IndustriaAustin OrtegaОценок пока нет
- Formulacion y Nomenclatura QuimicaДокумент72 страницыFormulacion y Nomenclatura QuimicaAustin OrtegaОценок пока нет
- Tema-Objetivos-Marco TeóricoДокумент11 страницTema-Objetivos-Marco TeóricoAustin OrtegaОценок пока нет
- Sistema de Gestión AmbientalДокумент1 страницаSistema de Gestión AmbientalAustin OrtegaОценок пока нет
- TORQUÍMETROSДокумент3 страницыTORQUÍMETROSAustin OrtegaОценок пока нет
- Control de DesplazamientoДокумент15 страницControl de DesplazamientoAustin OrtegaОценок пока нет
- Ortega Caisaguano TERMÓMETROS-INDUSTRIALESДокумент31 страницаOrtega Caisaguano TERMÓMETROS-INDUSTRIALESAustin OrtegaОценок пока нет
- Eficiencia y EficaciaДокумент8 страницEficiencia y EficaciaThomas Cruz SalgueroОценок пока нет
- Ensayo de Traccion BiaxialДокумент19 страницEnsayo de Traccion BiaxialAlberto PertuzОценок пока нет
- Catalogo AstralloyДокумент26 страницCatalogo Astralloymekoxxx100% (1)
- Medición de Liquidos o Caudales en PetroleoДокумент14 страницMedición de Liquidos o Caudales en PetroleoValdivia FlavioОценок пока нет
- Calculo de InyectoresДокумент11 страницCalculo de InyectoresRobEllieОценок пока нет
- 95-33286-0000-ESP - 1.0 - es-ES - 2021-04 - IOM - CD, HL, and NC SeriesДокумент24 страницы95-33286-0000-ESP - 1.0 - es-ES - 2021-04 - IOM - CD, HL, and NC SeriesIvan RsОценок пока нет
- Ejercicio 9.1Документ6 страницEjercicio 9.1franz miolerОценок пока нет
- Presentacion Afex OperadoresДокумент37 страницPresentacion Afex Operadoresvictor mac conellОценок пока нет
- Chasis Suspension y Frenos Contenido 7Документ81 страницаChasis Suspension y Frenos Contenido 7Alex Méndez RojasОценок пока нет
- Exa 2018 1s Mecánica de Sólidos I 2 MejoraДокумент5 страницExa 2018 1s Mecánica de Sólidos I 2 MejoraDaniela Morocho LindaoОценок пока нет
- Resumen y SeminarioДокумент10 страницResumen y SeminarioRenato MiguelОценок пока нет
- 3632M PDFДокумент21 страница3632M PDFOdin de AsgardОценок пока нет
- Que Es Cilindrada o CilindrajeДокумент2 страницыQue Es Cilindrada o CilindrajeAngel Ortega0% (2)
- Curso Basico de Simulacion de Procesos Con Aspen Hysys PDFДокумент144 страницыCurso Basico de Simulacion de Procesos Con Aspen Hysys PDFkriko100% (2)
- Chemcad SimbologiaДокумент13 страницChemcad SimbologiaEréndira RamírezОценок пока нет
- Turbina PeltonДокумент1 страницаTurbina PeltonGerman AlexanderОценок пока нет
- SismoДокумент24 страницыSismoYolimar AcevedoОценок пока нет
- KAT Categoría (V Valores Estándar, E Valor de Ajuste, Ü Valor de Verificación) AT Fuera de Tolerancias (X Está Activo)Документ5 страницKAT Categoría (V Valores Estándar, E Valor de Ajuste, Ü Valor de Verificación) AT Fuera de Tolerancias (X Está Activo)Karen FalconesОценок пока нет
- Precios Dic 2019Документ20 страницPrecios Dic 2019ssОценок пока нет
- Actividad 1 Maquinaria PesadaДокумент12 страницActividad 1 Maquinaria PesadaLuis Ricardo Pérez ContrerasОценок пока нет
- Practica Transmision Por BandaДокумент6 страницPractica Transmision Por BandaRaúl Díaz ZárateОценок пока нет
- Física 4to I PARTEДокумент110 страницFísica 4to I PARTESahir Emanuel Zarate MamaniОценок пока нет
- Flujo Del Agua en El SueloДокумент15 страницFlujo Del Agua en El Suelojuvenalmc79439Оценок пока нет
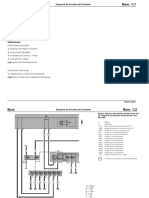
- 01 Equipo Basico Mex BoraДокумент22 страницы01 Equipo Basico Mex BoraZelva ChileОценок пока нет
- Nissan Sentra 2000 Diagrama 3Документ6 страницNissan Sentra 2000 Diagrama 3YduR ZurCОценок пока нет
- Sistemas de Refrigeración Del Amoniaco Ciclo de Refrigeración Del AmoniacoДокумент9 страницSistemas de Refrigeración Del Amoniaco Ciclo de Refrigeración Del AmoniacoangelОценок пока нет
- ActividadesДокумент6 страницActividadesReyna MirandaОценок пока нет
- Actividad Trabajo Realizado Por Una Fuerza - Fisica 10Документ2 страницыActividad Trabajo Realizado Por Una Fuerza - Fisica 10Win by the ForceОценок пока нет
- Libro Termodinamica Cap 10 Primera Ley Sistemas Abiertos Hadzich PDFДокумент17 страницLibro Termodinamica Cap 10 Primera Ley Sistemas Abiertos Hadzich PDFPedro Luis Gareca VascoОценок пока нет
- Presupuesto de Obra Formato OriginalДокумент216 страницPresupuesto de Obra Formato OriginalJose Silva Sandoval100% (1)