Вам также может понравиться
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- Control NEMA Amb JoystickДокумент3 страницыControl NEMA Amb JoystickSérgio PortuОценок пока нет
- Sensor Ve ESP8266Документ13 страницSensor Ve ESP8266ilker aykutОценок пока нет
- Lab06 - Smart Home Automation Using SensorsДокумент14 страницLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Microcontrolleurs: Marin IulianaДокумент11 страницMicrocontrolleurs: Marin IulianaCoop ZkuberveitОценок пока нет
- Script Arduino Motor BrushlessДокумент6 страницScript Arduino Motor BrushlessebrielОценок пока нет
- Contoh Program ArduinoДокумент29 страницContoh Program Arduinohervina kirunaОценок пока нет
- ความเร็วทดลองДокумент4 страницыความเร็วทดลองธวัชชัย ตรีศูนย์Оценок пока нет
- โค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างДокумент4 страницыโค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างธวัชชัย ตรีศูนย์Оценок пока нет
- Human Detection - InoДокумент4 страницыHuman Detection - InoAbdОценок пока нет
- Arduino Based Motor Driver: Nuudel@must - Edu.mnДокумент25 страницArduino Based Motor Driver: Nuudel@must - Edu.mnMyagmarjav NuudelОценок пока нет
- ÁdДокумент9 страницÁdvinhsogoodОценок пока нет
- Basis CodesДокумент15 страницBasis CodesJholo LopezОценок пока нет
- ทดสอบДокумент5 страницทดสอบธวัชชัย ตรีศูนย์Оценок пока нет
- TH C Hành VI X LýДокумент11 страницTH C Hành VI X Lývăn baОценок пока нет
- The Code of RobotДокумент10 страницThe Code of Robotdarshan kОценок пока нет
- UntitledДокумент6 страницUntitledMark christian LacapОценок пока нет
- Master of Computer Application: 2nd Year, Semester-3Документ8 страницMaster of Computer Application: 2nd Year, Semester-309Samrat Bikram ShahОценок пока нет
- Arduino Control Car V2 byДокумент4 страницыArduino Control Car V2 byMikaela E Ramírez HerreraОценок пока нет
- Line Follower and Obstacle Avoiding Robot - InoДокумент4 страницыLine Follower and Obstacle Avoiding Robot - Inoakuladamodhar20Оценок пока нет
- Program HeaterДокумент5 страницProgram HeaterRenraОценок пока нет
- IOT AssignmentДокумент8 страницIOT Assignment09Samrat Bikram ShahОценок пока нет
- UntitledДокумент6 страницUntitledMark christian LacapОценок пока нет
- IOT Lab ExpДокумент10 страницIOT Lab Expsri kanthОценок пока нет
- Tài liệu không có tiêu đềДокумент8 страницTài liệu không có tiêu đề21145452Оценок пока нет
- Tugas ArduinoДокумент17 страницTugas ArduinoNathaniel CrosleyОценок пока нет
- Codigo SpinnerДокумент4 страницыCodigo SpinnerCiintyaa L. CammpasОценок пока нет
- Ramping Move Same TimeДокумент6 страницRamping Move Same TimeThinh HoangОценок пока нет
- AGV Project Codes CompilationДокумент15 страницAGV Project Codes CompilationJhasper ManagyoОценок пока нет
- Obstacle Avoid RobotДокумент4 страницыObstacle Avoid RobotRobby surya f100% (1)
- ESP8266 Masina3PWM - InoДокумент10 страницESP8266 Masina3PWM - InomarinpopaОценок пока нет
- MahhanДокумент24 страницыMahhangiatrispktОценок пока нет
- Arduino PracticasДокумент10 страницArduino PracticasFrancisco David IcazaОценок пока нет
- RobocodeДокумент4 страницыRobocodeKanishka YadavОценок пока нет
- Embedded Software Os Solar Tracker Test BenchДокумент3 страницыEmbedded Software Os Solar Tracker Test BenchRodrigo Ortolá InocentiОценок пока нет
- Arduino SketchДокумент2 страницыArduino Sketchjagtar.muggoОценок пока нет
- ARDUINO Tinkercad Practices - NoДокумент116 страницARDUINO Tinkercad Practices - NoDavidОценок пока нет
- ADCДокумент6 страницADCJhon PerezОценок пока нет
- CodeДокумент5 страницCodeAbaidullah SajidОценок пока нет
- Codigo Final Al 100%Документ9 страницCodigo Final Al 100%Jose Bone MinaОценок пока нет
- Скетч от неизвестногоДокумент3 страницыСкетч от неизвестногоLaserskayaОценок пока нет
- Muntinlupa TrainingДокумент3 страницыMuntinlupa TrainingantoinnevongenesisОценок пока нет
- HC 12 Radio - EPPLДокумент12 страницHC 12 Radio - EPPLSeth Madhusudan RathiОценок пока нет
- Sample Setting Up Two or More VoidДокумент5 страницSample Setting Up Two or More VoidJade Panzo SalaspeОценок пока нет
- Obd2 Simulator - InoДокумент4 страницыObd2 Simulator - InoabdОценок пока нет
- Robot Wifi CamДокумент14 страницRobot Wifi CamjoseplinОценок пока нет
- Reglarea Vitezei La MCCДокумент10 страницReglarea Vitezei La MCCGaby AxlОценок пока нет
- Code ExplanantionДокумент4 страницыCode ExplanantionVivek JadiyaОценок пока нет
- M DetectorДокумент2 страницыM DetectorEstefanybp Bazarcito San JuanОценок пока нет
- Car ProgamДокумент4 страницыCar ProgamErlyn Joy ArlanteОценок пока нет
- Microsumo CodeДокумент8 страницMicrosumo Codeutp0143586Оценок пока нет
- Arduino CodeДокумент3 страницыArduino Codeapi-386988995Оценок пока нет
- ProjectcodeДокумент3 страницыProjectcodeRahul YadavОценок пока нет
- Proiecte ArduinoДокумент46 страницProiecte ArduinoSyad AlyОценок пока нет
- Lampiran: Foto HardwareДокумент22 страницыLampiran: Foto HardwareThomas Puri KrishanantoОценок пока нет
- Line Following Robot ProgrammingДокумент6 страницLine Following Robot ProgrammingAngelinaОценок пока нет
- Const Int FrontEchoPinДокумент6 страницConst Int FrontEchoPinNeethi LalОценок пока нет
- Enhanced Dual Axis ProgramДокумент12 страницEnhanced Dual Axis ProgramLENKAI—254Оценок пока нет
- ParkДокумент3 страницыParkpatelansh9484Оценок пока нет
- UntitledДокумент16 страницUntitledMark christian LacapОценок пока нет
- Activity 1 and Activity 2Документ7 страницActivity 1 and Activity 2Mohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
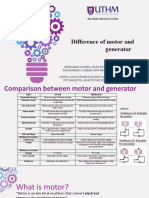
- Difference Between Motor and GeneratorДокумент11 страницDifference Between Motor and GeneratorMohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- Item Motor Generator Conversation of Energy Function of Energy How Shaft Rotated Function of Current Fleming Hand Rule EMF and Voltage FormulaДокумент1 страницаItem Motor Generator Conversation of Energy Function of Energy How Shaft Rotated Function of Current Fleming Hand Rule EMF and Voltage FormulaMohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- TutorialДокумент1 страницаTutorialMohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- List All The Types of Electrical Machines Being Presented in This Video?Документ1 страницаList All The Types of Electrical Machines Being Presented in This Video?Mohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- Uqi 10102 Pengajian Islam Laporan Aktiviti Program Daurah Ramadhan: Adab Berpuasa (Siri 2)Документ2 страницыUqi 10102 Pengajian Islam Laporan Aktiviti Program Daurah Ramadhan: Adab Berpuasa (Siri 2)Mohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- Hmelo SilverДокумент18 страницHmelo SilverMohamad Nasrul Hadi Bin Mohd AyopОценок пока нет
- Directional: 12 1/4in Sdi519 PDCДокумент1 страницаDirectional: 12 1/4in Sdi519 PDCKhairatul Nada BurhanuddinОценок пока нет
- Hydrogen Sulfide and Mercaptan Sulfur in Liquid Hydrocarbons by Potentiometric TitrationДокумент8 страницHydrogen Sulfide and Mercaptan Sulfur in Liquid Hydrocarbons by Potentiometric TitrationINOPETRO DO BRASILОценок пока нет
- Toyota Motor Manufacturing (TMM)Документ20 страницToyota Motor Manufacturing (TMM)Lekha ShahОценок пока нет
- Overcoming Obstacles To Ethical BehaviourДокумент4 страницыOvercoming Obstacles To Ethical BehaviourSimran SinghОценок пока нет
- MOEMS 2020 Questions Paper Division EДокумент20 страницMOEMS 2020 Questions Paper Division EHarleenaDivs50% (4)
- Community Policing EssaysДокумент7 страницCommunity Policing Essaysgqdknjnbf100% (2)
- Bistable Relays RXMVB 2, RXMVB 4: FeaturesДокумент4 страницыBistable Relays RXMVB 2, RXMVB 4: FeaturesGabriel Maxo PapagalloОценок пока нет
- Metalastik Type Chevron SpringsДокумент6 страницMetalastik Type Chevron SpringsBo WangОценок пока нет
- Operator'S Manual AND Set-Up Instructions For The: WDL-2070-FAДокумент49 страницOperator'S Manual AND Set-Up Instructions For The: WDL-2070-FAМаксим ЛитвинОценок пока нет
- Plaquette-Costronic en 2020Документ2 страницыPlaquette-Costronic en 2020Jun OrtizОценок пока нет
- Internship Report PDFДокумент11 страницInternship Report PDFASWIN KUMARОценок пока нет
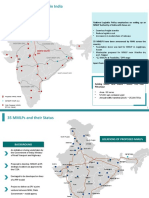
- Development of Mmlps in India: Western DFC Eastern DFCДокумент2 страницыDevelopment of Mmlps in India: Western DFC Eastern DFCsdfg100% (2)
- Super 6 Comprehension StrategiesДокумент1 страницаSuper 6 Comprehension StrategiesrosypatelОценок пока нет
- Land SurveyingДокумент174 страницыLand SurveyingArifulmakrif Hailee100% (2)
- Final Report 2Документ110 страницFinal Report 2Aftab AliОценок пока нет
- IsaqbДокумент26 страницIsaqbSyed HussainiОценок пока нет
- Introduction To Game Theory: Analysis of GamesДокумент13 страницIntroduction To Game Theory: Analysis of GamesAoiОценок пока нет
- AOC TFT-LCD Color Monitor 931Fwz Service ManualДокумент54 страницыAOC TFT-LCD Color Monitor 931Fwz Service ManualtecnosomОценок пока нет
- Breuer - Sun & Shadow (Inglés) PDFДокумент18 страницBreuer - Sun & Shadow (Inglés) PDFccorrea74Оценок пока нет
- Refinery Workbook ExerciseДокумент54 страницыRefinery Workbook ExerciseHarshit SharmaОценок пока нет
- Word Formation ListДокумент8 страницWord Formation ListpaticiaОценок пока нет
- Legislation Statutory Inspection ChecklistДокумент2 страницыLegislation Statutory Inspection ChecklistAry PutraОценок пока нет
- Rae Systems Parts List October 26 2010Документ2 страницыRae Systems Parts List October 26 2010Mike HastingsОценок пока нет
- Detector Demetales Manuel 103Документ6 страницDetector Demetales Manuel 103wilfredoОценок пока нет
- Prepared For: Assignment On Workforce DiversityДокумент28 страницPrepared For: Assignment On Workforce DiversityGolam RabbeОценок пока нет
- ISMR B-School BrochureДокумент28 страницISMR B-School Brochurerahul kantОценок пока нет
- Roman Helmet From SivacДокумент33 страницыRoman Helmet From SivacArachne DreamweaverОценок пока нет
- 3PM - Project Management Method - Sales MessagingДокумент5 страниц3PM - Project Management Method - Sales Messagingberuang kutubОценок пока нет
- Surface TensisonДокумент28 страницSurface TensisonJAWAD AHMAD BURTОценок пока нет
- Brushless MotorsДокумент20 страницBrushless Motorsbwatkins6Оценок пока нет
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОт EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceОценок пока нет
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.От EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Рейтинг: 5 из 5 звезд5/5 (34)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.От EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Рейтинг: 5 из 5 звезд5/5 (2)
- Clean Code: A Handbook of Agile Software CraftsmanshipОт EverandClean Code: A Handbook of Agile Software CraftsmanshipРейтинг: 5 из 5 звезд5/5 (13)
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekОт EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleОт EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleРейтинг: 4 из 5 звезд4/5 (16)
- Software Engineering at Google: Lessons Learned from Programming Over TimeОт EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeРейтинг: 4 из 5 звезд4/5 (11)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsОт EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsРейтинг: 4.5 из 5 звезд4.5/5 (24)
- Once Upon an Algorithm: How Stories Explain ComputingОт EverandOnce Upon an Algorithm: How Stories Explain ComputingРейтинг: 4 из 5 звезд4/5 (43)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerОт EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerРейтинг: 5 из 5 звезд5/5 (1)
- Coders at Work: Reflections on the Craft of ProgrammingОт EverandCoders at Work: Reflections on the Craft of ProgrammingРейтинг: 4 из 5 звезд4/5 (151)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersОт EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersРейтинг: 5 из 5 звезд5/5 (7)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerОт EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerРейтинг: 4.5 из 5 звезд4.5/5 (44)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionОт EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionРейтинг: 5 из 5 звезд5/5 (2)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)От EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Рейтинг: 5 из 5 звезд5/5 (1)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepОт EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepРейтинг: 4.5 из 5 звезд4.5/5 (19)
- What Algorithms Want: Imagination in the Age of ComputingОт EverandWhat Algorithms Want: Imagination in the Age of ComputingРейтинг: 3.5 из 5 звезд3.5/5 (41)
- Learn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisОт EverandLearn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisОценок пока нет