Вам также может понравиться
- CHAPITRE IV Archi Syst. ProgrammésДокумент40 страницCHAPITRE IV Archi Syst. ProgrammésTimble PuteurОценок пока нет
- Qu'est Que L'informatique Industrielle?: - Les Domaines D'application: Systèmes EmbarquésДокумент43 страницыQu'est Que L'informatique Industrielle?: - Les Domaines D'application: Systèmes Embarquésfazfrito lacaviataОценок пока нет
- chapitre1_licence MicroprocesseurДокумент19 страницchapitre1_licence MicroprocesseurAbdallah RehabОценок пока нет
- Corrtd 1Документ7 страницCorrtd 1wafa wafaОценок пока нет
- Chapitre 1 - Généralités Sur Les Systèmes A Microprocesseur (2017-2018)Документ7 страницChapitre 1 - Généralités Sur Les Systèmes A Microprocesseur (2017-2018)Ali OuattaraОценок пока нет
- Traitement de L'information PDFДокумент6 страницTraitement de L'information PDFFarid AfifiОценок пока нет
- Cours Microprocesseur Et MicrocontroleursimplДокумент171 страницаCours Microprocesseur Et MicrocontroleursimplAbdou Super100% (1)
- Chapitre I Introduction Et RappelsДокумент14 страницChapitre I Introduction Et RappelsSanae BOUNOUAОценок пока нет
- Chapitre 1Документ16 страницChapitre 1YOUCEF BOUHARAOUAОценок пока нет
- Architecture Des Ordinateurs Cours-1Документ14 страницArchitecture Des Ordinateurs Cours-1Louis KouassiОценок пока нет
- TD1 19corrДокумент5 страницTD1 19corrSaid ReganiОценок пока нет
- Arch Des OrdДокумент6 страницArch Des Ordmayssemzinoubi610Оценок пока нет
- Cours Micro Controleur Architecture STSДокумент7 страницCours Micro Controleur Architecture STSMAHAMADOU TOUNGARAОценок пока нет
- Systemes Microcontroleurs Chap.1 Chap.2Документ15 страницSystemes Microcontroleurs Chap.1 Chap.2MENANI ZineddineОценок пока нет
- Chapitre1 Architecture - Ordinateurs - 2019 - 2020Документ13 страницChapitre1 Architecture - Ordinateurs - 2019 - 2020Bessem BessemОценок пока нет
- Microprocesseur 6800 Chap1Документ6 страницMicroprocesseur 6800 Chap1Mountasser KhalОценок пока нет
- Les Composants DordinateurДокумент11 страницLes Composants DordinateurMamoudou DiengОценок пока нет
- Moto 6809Документ46 страницMoto 6809Kawtar FelkiОценок пока нет
- Cours-Architectures Des Processeurs-Mr Nizar TOUJANIДокумент115 страницCours-Architectures Des Processeurs-Mr Nizar TOUJANIIbtihel MechleouiОценок пока нет
- SAM - Chapitre 2Документ7 страницSAM - Chapitre 2الشاب المسلمОценок пока нет
- Historique Et Structure MachineДокумент13 страницHistorique Et Structure MachineMi MaОценок пока нет
- Architecture de BaseДокумент7 страницArchitecture de BaseDivin BoudzoumouОценок пока нет
- Chapitre 2.AДокумент15 страницChapitre 2.Aabdou adelОценок пока нет
- TD Sup-1Документ3 страницыTD Sup-1khallah CherifОценок пока нет
- Info TristanДокумент14 страницInfo TristanEulerОценок пока нет
- Cours Presentation D Un Micro OrdinateurДокумент8 страницCours Presentation D Un Micro OrdinateurNadia Kefif100% (3)
- InformatiqueДокумент15 страницInformatiqueDiakaridia CoulibalyОценок пока нет
- Wa0011Документ41 страницаWa0011Naima MekОценок пока нет
- Microsoft PowerPoint - Cours de PIC GénéralitésДокумент17 страницMicrosoft PowerPoint - Cours de PIC GénéralitésNor AlhoudaОценок пока нет
- Architecture de Base ChapiДокумент5 страницArchitecture de Base ChapiMoTaALОценок пока нет
- Mini-Projet Microprocesseur KIT MC09Документ19 страницMini-Projet Microprocesseur KIT MC09hamza booba100% (2)
- TD1Документ2 страницыTD1hamza messaadiaОценок пока нет
- Architecture D - Un OrdinateurДокумент29 страницArchitecture D - Un OrdinateurProfbizerte BizerteОценок пока нет
- QCM Généralités InformatiquesДокумент11 страницQCM Généralités InformatiquesGhislaine REMONDO100% (1)
- Informatique s2 Fini PDFДокумент9 страницInformatique s2 Fini PDFMstr Belkac100% (1)
- Chapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Документ29 страницChapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Karym ElhoussineОценок пока нет
- Partie1 Introduction Cours PДокумент15 страницPartie1 Introduction Cours PKhadija HtОценок пока нет
- QCM Corro Architecture - 123325Документ6 страницQCM Corro Architecture - 123325Grâce AudreyОценок пока нет
- Architecture OrdinateurДокумент14 страницArchitecture OrdinateurmedkhamОценок пока нет
- Cours de PIC Généralités PDFДокумент18 страницCours de PIC Généralités PDFAhmed FeradjiОценок пока нет
- TP 1 Info Indus07Документ15 страницTP 1 Info Indus07MOHAMED TAMZAITIОценок пока нет
- Leçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleДокумент120 страницLeçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleFulbert FissouОценок пока нет
- C2 - Structure Generale D'un Micro-OrdinateurДокумент4 страницыC2 - Structure Generale D'un Micro-OrdinateurMahrez DerdoumОценок пока нет
- Informatique IndustrielleДокумент16 страницInformatique IndustrielleNo RayaОценок пока нет
- Chap 2Документ5 страницChap 2INESОценок пока нет
- Chapitre 1-2Документ37 страницChapitre 1-2BadjoОценок пока нет
- Examen ATOДокумент2 страницыExamen ATOAdos AgbidinoukounОценок пока нет
- Chapitre 3 DSP 2020-2021Документ33 страницыChapitre 3 DSP 2020-2021M'hamed Saadi BachirОценок пока нет
- Culture Et Techniques Du Numérique EI101Документ14 страницCulture Et Techniques Du Numérique EI101aminachebihi5Оценок пока нет
- Cours No 01 Approche Des Systèmes A Microprocesseurs.Документ4 страницыCours No 01 Approche Des Systèmes A Microprocesseurs.MAROUA TWALBIAОценок пока нет
- Un - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurДокумент11 страницUn - Syst - Me - Microprocesseur - PDF Filename - UTF-8''Un Système À MicroprocesseurLynda MOKRANIОценок пока нет
- CHAPITRE 7 Architecture Des Mémoires Et Des ProcesseursДокумент14 страницCHAPITRE 7 Architecture Des Mémoires Et Des ProcesseursHappy lifeОценок пока нет
- Cours MP - ELECT4Документ124 страницыCours MP - ELECT4MoundherNasmlahe100% (1)
- Cours Architecture Matérielle de L'ordinateurqsdfqДокумент22 страницыCours Architecture Matérielle de L'ordinateurqsdfqjedipi7523Оценок пока нет
- Exposé Le MicroprocesseurДокумент8 страницExposé Le MicroprocesseurMamadou Seydou Diallo67% (6)
- Ite Clientwin 1Документ1 страницаIte Clientwin 1El Amrani Laila100% (1)
- Chapitre 1Документ17 страницChapitre 1louizini abderahmaneОценок пока нет
- CH2 - Architecture Des OrdinateursДокумент5 страницCH2 - Architecture Des OrdinateursJean LucОценок пока нет
- Machines de Jeux: Architecture des Consoles de Jeux VidéoОт EverandMachines de Jeux: Architecture des Consoles de Jeux VidéoРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLОт EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLОценок пока нет
- CHAPITRE I Circuits Logiq Combinatoires PDFДокумент28 страницCHAPITRE I Circuits Logiq Combinatoires PDFTimble Puteur100% (1)
- Contenu EN - L2 PDFДокумент1 страницаContenu EN - L2 PDFTimble PuteurОценок пока нет
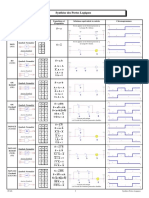
- PDF - Synthese Portes Logiq PDFДокумент2 страницыPDF - Synthese Portes Logiq PDFTimble PuteurОценок пока нет
- CHAPITRE II Circuits Séquentiels PDFДокумент35 страницCHAPITRE II Circuits Séquentiels PDFTimble PuteurОценок пока нет
- Travaux Dirigés D'electronique Numérique Licence2Документ6 страницTravaux Dirigés D'electronique Numérique Licence2Timble Puteur100% (1)
- TD N°1 en L2 PDFДокумент6 страницTD N°1 en L2 PDFTimble PuteurОценок пока нет
- CHAPITRE III Monost - Astabl PDFДокумент6 страницCHAPITRE III Monost - Astabl PDFTimble PuteurОценок пока нет
- TD - N°2 - EN - Systèmes À MicroprocesseurДокумент7 страницTD - N°2 - EN - Systèmes À MicroprocesseurTimble Puteur100% (2)
- TD - N°2 - EN - Systèmes À Microprocesseur PDFДокумент7 страницTD - N°2 - EN - Systèmes À Microprocesseur PDFTimble Puteur100% (1)
- PDF - Synthese Portes Logiq PDFДокумент2 страницыPDF - Synthese Portes Logiq PDFTimble PuteurОценок пока нет
- Contenu EN - L2Документ1 страницаContenu EN - L2Timble PuteurОценок пока нет
- CHAPITRE I Circuits Logiq Combinatoires PDFДокумент28 страницCHAPITRE I Circuits Logiq Combinatoires PDFTimble PuteurОценок пока нет
- CHAPITRE II Circuits SéquentielsДокумент35 страницCHAPITRE II Circuits SéquentielsTimble PuteurОценок пока нет
- CHAPITRE III Monost - Astabl.Документ6 страницCHAPITRE III Monost - Astabl.Timble PuteurОценок пока нет
- Annexe1 - Technologie Des Circuits Integres NumeriquesДокумент4 страницыAnnexe1 - Technologie Des Circuits Integres NumeriquesTimble PuteurОценок пока нет
- CHAPITRE I Circuits Logiq Combinatoires PDFДокумент28 страницCHAPITRE I Circuits Logiq Combinatoires PDFTimble Puteur100% (1)
- Annexe1 - Technologie Des Circuits Integres Numeriques PDFДокумент4 страницыAnnexe1 - Technologie Des Circuits Integres Numeriques PDFTimble PuteurОценок пока нет
- Cours Generalite InformatiqueДокумент40 страницCours Generalite InformatiqueSaid Sunghour Sunghour100% (1)
- TP N°1 M1 Embarqué MicrocontrôleurДокумент2 страницыTP N°1 M1 Embarqué Microcontrôleurعمر الفاروقОценок пока нет
- Ue Inf302 FSS - Seance 3Документ8 страницUe Inf302 FSS - Seance 3Elie DjiedjomОценок пока нет
- Storage 4Документ1 страницаStorage 4Ayoub ZahRaouiОценок пока нет
- Memoire de Master: Ministere de L'Enseignement Superieur Et de La Recherche ScientifiqueДокумент103 страницыMemoire de Master: Ministere de L'Enseignement Superieur Et de La Recherche ScientifiqueDiana AugustinaeОценок пока нет
- TD 3 SolutionДокумент3 страницыTD 3 SolutionabdellatifОценок пока нет
- Installation en MonoposteДокумент44 страницыInstallation en MonoposteNabila TouisiОценок пока нет
- Document 16Документ6 страницDocument 16Yassine ShimiОценок пока нет
- L'informatique de A À Z PDFДокумент713 страницL'informatique de A À Z PDFMamison RandriamalalaОценок пока нет
- Cours Sur La Carte MèreДокумент120 страницCours Sur La Carte Mèreimad voukhiar100% (2)
- BureautiqueДокумент5 страницBureautiqueMaster CIL100% (1)
- Devoir de Contrôle #1 - Informatique - 7ème (2007-2008)Документ2 страницыDevoir de Contrôle #1 - Informatique - 7ème (2007-2008)Abdelhak TaziОценок пока нет
- Devoir N°01 PLDДокумент2 страницыDevoir N°01 PLDsaviorОценок пока нет
- Assemblage D'un OrdinateurДокумент41 страницаAssemblage D'un OrdinateurAMINE BEN100% (2)
- La Configuration Monoposte 2019Документ3 страницыLa Configuration Monoposte 2019Yanis MalkiОценок пока нет
- Document Sur La Carte Esp32Документ10 страницDocument Sur La Carte Esp32Khawla AmeurОценок пока нет
- Conception de Systèmes EmbarquésДокумент60 страницConception de Systèmes EmbarquésHamdane BensenaneОценок пока нет
- Cours 2 Les MémoiresДокумент6 страницCours 2 Les MémoiresBELHOUSSINEОценок пока нет
- Travail PDFДокумент2 страницыTravail PDFFarok RamosОценок пока нет
- ECF 1loukiaДокумент7 страницECF 1loukiaLeila KararОценок пока нет
- 2-La Carte MereДокумент12 страниц2-La Carte MereTahar GFОценок пока нет
- Informatique GeneralДокумент205 страницInformatique Generalmejriadem911Оценок пока нет
- Cours 2 - Archtecure Du PIC 16F84Документ31 страницаCours 2 - Archtecure Du PIC 16F84KhadidjaОценок пока нет
- Corrction Orrection de 3Документ8 страницCorrction Orrection de 3Nidal LaatabОценок пока нет
- 38 Corrige13Документ2 страницы38 Corrige13Didier Tchaleu100% (1)
- Xx-Carte 4635H J VPU5-01Документ20 страницXx-Carte 4635H J VPU5-01Abderahmane DjebaliОценок пока нет
- Flex-Tech InformatiqueДокумент2 страницыFlex-Tech InformatiquePatrice GoutonОценок пока нет
- Micro CArduino EI31819 Deuxieme PartieДокумент41 страницаMicro CArduino EI31819 Deuxieme Partieclément valleyОценок пока нет
- QCM Ite 6.0 N°1Документ5 страницQCM Ite 6.0 N°1loffy hacker100% (1)
- A L'intérieur de L'ordinateurДокумент10 страницA L'intérieur de L'ordinateurHocine BeОценок пока нет