Вам также может понравиться
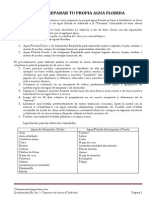
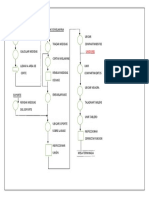
- Agua FloridaДокумент2 страницыAgua Floridaericafd100% (3)
- Portafolio PersonalДокумент8 страницPortafolio PersonalJoaquin Aguayo UrrutiaОценок пока нет
- Modelo CanvasДокумент4 страницыModelo CanvasTatiana GilОценок пока нет
- 100 Adivinanzas y AcertijosДокумент3 страницы100 Adivinanzas y AcertijoshernaldogarayОценок пока нет
- Practica 5 Q.O Aldehidos y CetonasДокумент11 страницPractica 5 Q.O Aldehidos y CetonasAnonymous uePsHU100% (6)
- Historia y Elaboración Del WhiskyДокумент6 страницHistoria y Elaboración Del WhiskyVladimir PerezОценок пока нет
- Analisis Eeff Alicorp-Taf CentrumДокумент16 страницAnalisis Eeff Alicorp-Taf CentrumCarla Bocanegra Risco100% (1)
- Cloruro de PotasioДокумент3 страницыCloruro de PotasioLuisa Francesca Bambaren MauricciОценок пока нет
- Tarificador Decesos Pago UnicoДокумент8 страницTarificador Decesos Pago UnicoLuisa Francesca Bambaren MauricciОценок пока нет
- Calidad - ISO 9001 EN PERÚДокумент15 страницCalidad - ISO 9001 EN PERÚLuisa Francesca Bambaren MauricciОценок пока нет
- Automatización y NeumáticaДокумент15 страницAutomatización y NeumáticaLuisa Francesca Bambaren MauricciОценок пока нет
- Tarificador Decesos Pago SiempreДокумент11 страницTarificador Decesos Pago SiempreLuisa Francesca Bambaren MauricciОценок пока нет
- Repercusión en El Sector EducaciónДокумент4 страницыRepercusión en El Sector EducaciónLuisa Francesca Bambaren MauricciОценок пока нет
- Alumnos para Aperturar El Curso de Manufactura Asistida Por Computadora (Malla 52)Документ1 страницаAlumnos para Aperturar El Curso de Manufactura Asistida Por Computadora (Malla 52)Luisa Francesca Bambaren MauricciОценок пока нет
- Competencia Desleal y Efectos de La PublicidadДокумент32 страницыCompetencia Desleal y Efectos de La PublicidadJessicaFarroSalcedoОценок пока нет
- SensoresДокумент15 страницSensoresLuisa Francesca Bambaren MauricciОценок пока нет
- Casa de Calidad 2.0Документ10 страницCasa de Calidad 2.0Luisa Francesca Bambaren MauricciОценок пока нет
- La Actividad Empresarial y La Proteccion Al Medio AmbienteДокумент44 страницыLa Actividad Empresarial y La Proteccion Al Medio AmbienteLuisa Francesca Bambaren MauricciОценок пока нет
- Sesion 1 - 1 Estrategia Competitiva FodaДокумент11 страницSesion 1 - 1 Estrategia Competitiva FodaLuisa Francesca Bambaren MauricciОценок пока нет
- Nocion Juridica de La Empresa. La Titularidad Empresarial. Personas Naturales y Juricas. Las AccionesДокумент39 страницNocion Juridica de La Empresa. La Titularidad Empresarial. Personas Naturales y Juricas. Las AccionesLuisa Francesca Bambaren MauricciОценок пока нет
- Sesion Ii A Marco Constitucional de La EmpresaДокумент17 страницSesion Ii A Marco Constitucional de La EmpresaJessicaFarroSalcedoОценок пока нет
- Sem 04 Industria y Lluvia ÁcidaДокумент6 страницSem 04 Industria y Lluvia ÁcidaAlexander GarciaОценок пока нет
- DOP de Una MesaДокумент1 страницаDOP de Una MesaLuisa Francesca Bambaren MauricciОценок пока нет
- Sesion 1 - OrganizacionesДокумент43 страницыSesion 1 - OrganizacionesLuisa Francesca Bambaren MauricciОценок пока нет
- Seguro de DecesosДокумент4 страницыSeguro de DecesosLuisa Francesca Bambaren MauricciОценок пока нет
- Guía Técnica de BioseguridadДокумент1 страницаGuía Técnica de BioseguridadLuisa Francesca Bambaren MauricciОценок пока нет
- Audífono y Video Bloqueado en ChromeДокумент3 страницыAudífono y Video Bloqueado en ChromeLuisa Francesca Bambaren MauricciОценок пока нет
- Presupuesto PV PPДокумент15 страницPresupuesto PV PPLuisa Francesca Bambaren MauricciОценок пока нет
- Edad Media - Corazón ValienteДокумент14 страницEdad Media - Corazón ValienteLuisa Francesca Bambaren MauricciОценок пока нет
- Presupuesto PV PPДокумент15 страницPresupuesto PV PPLuisa Francesca Bambaren MauricciОценок пока нет
- Mercado Potencial Del NegocioДокумент8 страницMercado Potencial Del NegociorosmeryОценок пока нет
- Planilla Declaracion Ingresos Brutos BlogsДокумент1 страницаPlanilla Declaracion Ingresos Brutos Blogscarlos5g.5luque100% (1)
- Ciclo Del CapitalДокумент4 страницыCiclo Del CapitalefrainОценок пока нет
- CMMI y MoprosoftДокумент11 страницCMMI y MoprosoftYoOliiz RgОценок пока нет
- 1 Normas Iso9000 Introduccion PDFДокумент12 страниц1 Normas Iso9000 Introduccion PDFMaria Marta PalmieriОценок пока нет
- Factor MultiplicadorДокумент1 страницаFactor MultiplicadorFelipe PatiñoОценок пока нет
- Programación de Servicio TUДокумент19 страницProgramación de Servicio TUPaco Trooper100% (1)
- LegislaДокумент13 страницLegislakrystelgiselleОценок пока нет
- Indicador AROPEДокумент3 страницыIndicador AROPELaura LeonОценок пока нет
- Hongos de MarayhuacaДокумент34 страницыHongos de MarayhuacaClaudia Arias100% (1)
- 14 Principios de DemingДокумент22 страницы14 Principios de DemingElvis Tineo MoralesОценок пока нет
- Taller de VideosДокумент2 страницыTaller de VideosLuis Fernando VacaОценок пока нет
- Modelos de Registro de en AuxiliaresДокумент3 страницыModelos de Registro de en AuxiliaresAlanSunétОценок пока нет
- Contrato Juan David MartinezДокумент4 страницыContrato Juan David Martinezarmando alirioОценок пока нет
- Que Es La Partida Doble Asiento ContableДокумент3 страницыQue Es La Partida Doble Asiento Contablebobaso99Оценок пока нет
- Contabilidad 2-Informacion Contable-Libros ContablesДокумент31 страницаContabilidad 2-Informacion Contable-Libros ContableslauriОценок пока нет
- Ensayo Ética ProfesionalДокумент10 страницEnsayo Ética Profesionalvero1804Оценок пока нет
- Formatos Plan de Accion SuagaplastДокумент25 страницFormatos Plan de Accion SuagaplastEvelyn MoreNoОценок пока нет
- La Importancia en La Presentacion y Formulacion de Estados FinancierosДокумент15 страницLa Importancia en La Presentacion y Formulacion de Estados FinancierosQueen-isa IsabelОценок пока нет
- Guía de Operación 2616: Conociendo El RelojДокумент5 страницGuía de Operación 2616: Conociendo El RelojVОценок пока нет
- Objetivos Del InventarioДокумент5 страницObjetivos Del InventarioJulian Gamboa MorenoОценок пока нет
- Movimiento Campesinos de 1990 Al 2000Документ11 страницMovimiento Campesinos de 1990 Al 2000ANDRES RICARDO BARRERO LUCUARAОценок пока нет
- FodaДокумент1 страницаFodaMiguel AngelОценок пока нет