Вам также может понравиться
- Ejercicios de Funciones de Varias VariablesДокумент5 страницEjercicios de Funciones de Varias VariablesKleberpОценок пока нет
- Distribuciones Continuas de ProbabilidadДокумент12 страницDistribuciones Continuas de ProbabilidadPABLO GARCIA BELLOОценок пока нет
- DERIVADAДокумент38 страницDERIVADAJoel Zegarra DelgadoОценок пока нет
- Metodo de Jacobi - Gauss SeidelДокумент9 страницMetodo de Jacobi - Gauss SeidelMaribel RomeroОценок пока нет
- Entalpías normales o estándar de formación, ∆Hof, en kJ/molДокумент1 страницаEntalpías normales o estándar de formación, ∆Hof, en kJ/molMargarita Gomez Ortega0% (2)
- La ecuación general de segundo grado en dos y tres variablesОт EverandLa ecuación general de segundo grado en dos y tres variablesОценок пока нет
- Tabla de Derivadas-1Документ3 страницыTabla de Derivadas-1Luis Alberto Zapata OjedaОценок пока нет
- Derivadas de Funciones VectorialesДокумент5 страницDerivadas de Funciones VectorialesMedin Alexander BarrosoОценок пока нет
- Formulario 2-P PDFДокумент4 страницыFormulario 2-P PDFCarla FloresОценок пока нет
- DS 005-2012-TR Reglamento Ley 29783 LSSTДокумент20 страницDS 005-2012-TR Reglamento Ley 29783 LSSTJhon MoralesОценок пока нет
- Plano Tangente y DiferencialДокумент70 страницPlano Tangente y DiferencialLevi L'RojasОценок пока нет
- Derivadas parciales de funciones de varias variablesДокумент35 страницDerivadas parciales de funciones de varias variablesFrancisco JuarezОценок пока нет
- Reglas y Ejemplos de DerivadasДокумент4 страницыReglas y Ejemplos de Derivadasjhon alexander ramirez aponteОценок пока нет
- Formulario de DerivadasДокумент2 страницыFormulario de Derivadasjulio asencioОценок пока нет
- Examen Resuelto de Septiembre 2012 IndustrialesДокумент5 страницExamen Resuelto de Septiembre 2012 Industrialesrafael hidalgoОценок пока нет
- La Derivada InterpretacionДокумент14 страницLa Derivada InterpretacionJose Luis T SОценок пока нет
- Guía de Problemas Propuestos Ejercicios de Ecuaciones DiferencialesДокумент2 страницыGuía de Problemas Propuestos Ejercicios de Ecuaciones Diferencialesjolis1796Оценок пока нет
- Formulario de Derivadas - AdmДокумент1 страницаFormulario de Derivadas - AdmCarlos Medrano GalvezОценок пока нет
- Funciones de Varias Variables 2019-1 PDFДокумент5 страницFunciones de Varias Variables 2019-1 PDFLuis Fernando ReymundoОценок пока нет
- Lista 05 FMДокумент2 страницыLista 05 FMCarlos CapelliniОценок пока нет
- TP 0Документ2 страницыTP 0Frann ValloneОценок пока нет
- Conduccion Bidimensional EstacionariaДокумент11 страницConduccion Bidimensional Estacionarialedyta1550% (2)
- Representación de funciones y cálculo de límitesДокумент5 страницRepresentación de funciones y cálculo de límitesCristofer ApazaОценок пока нет
- Taller 4 Matemáticas Especiales ecuaciones calor barra cilíndricaДокумент2 страницыTaller 4 Matemáticas Especiales ecuaciones calor barra cilíndricaPaola Rueda DuarteОценок пока нет
- Formulario Reglas de DerivacionДокумент2 страницыFormulario Reglas de DerivacionGianpier Pier FloresОценок пока нет
- ResumenEjecutivoCap 3Документ6 страницResumenEjecutivoCap 3Ramón Antonio Zelaya MolinaОценок пока нет
- Examen Febrero 2012 CivilesДокумент7 страницExamen Febrero 2012 Civilesrafael hidalgoОценок пока нет
- Presentación9 TEMA 9Документ27 страницPresentación9 TEMA 9Bladimir charcaОценок пока нет
- LA TEORIA DE LIE PARA EDO S DE PRIMER OR PDFДокумент7 страницLA TEORIA DE LIE PARA EDO S DE PRIMER OR PDFNeverОценок пока нет
- Guía N. 04. Derivadas de Funciones Reales de Variable Real - YHSДокумент7 страницGuía N. 04. Derivadas de Funciones Reales de Variable Real - YHSJhonny HernandezОценок пока нет
- Formulas DerivadasДокумент1 страницаFormulas DerivadasIsmael SánchezОценок пока нет
- Tema IvДокумент23 страницыTema Ivfrancisco arquesОценок пока нет
- Tarea 9Документ2 страницыTarea 9Ramon Moreno LealОценок пока нет
- Maximos y Minimos Con RestrincionesДокумент7 страницMaximos y Minimos Con RestrincionesAmalex AbdiОценок пока нет
- 735 MTPS1 20-1Документ20 страниц735 MTPS1 20-1Antonio HernándezОценок пока нет
- Clase9 Funciones Variables Aleatorias Unidimensional EPM 2022 IIДокумент7 страницClase9 Funciones Variables Aleatorias Unidimensional EPM 2022 IIRomildo Silva CuadrosОценок пока нет
- Eva 1 AAAAДокумент8 страницEva 1 AAAAOscar MarineroОценок пока нет
- Clase ODE NoHomog VCДокумент13 страницClase ODE NoHomog VCyanara mozóОценок пока нет
- Ejercicios 2do ParcialДокумент4 страницыEjercicios 2do Parcialyenired montillaОценок пока нет
- Taula de DerivadesДокумент2 страницыTaula de DerivadesLucía FernándezОценок пока нет
- Trabajo Matemática Grupo 3 PDFДокумент92 страницыTrabajo Matemática Grupo 3 PDFFabrizio ReyesОценок пока нет
- Trabajo campo fuerza elipseДокумент4 страницыTrabajo campo fuerza elipseGONZALO AYCA TICONAОценок пока нет
- Primer Informe - Primera UnidadДокумент2 страницыPrimer Informe - Primera UnidadMatematica Fisica EstadisticaОценок пока нет
- Practica Calificada NДокумент7 страницPractica Calificada NIsac Anderson UsucachiОценок пока нет
- 990Документ13 страниц990Chuch Garcia IbarraОценок пока нет
- S7 Funciones PDFДокумент2 страницыS7 Funciones PDFMaria Cerquin MedinaОценок пока нет
- IS03 S11084277 Practicade FVVДокумент3 страницыIS03 S11084277 Practicade FVVARIAN ERICK SEVILLANO COLINAОценок пока нет
- S7 Antiderivada - Integral IndefinidaДокумент18 страницS7 Antiderivada - Integral IndefinidaPedro PalaciosОценок пока нет
- Derivada Direccional y GradienteДокумент17 страницDerivada Direccional y GradienteAmalex AbdiОценок пока нет
- AMGFUN2VAR5Документ6 страницAMGFUN2VAR5isabelОценок пока нет
- Tarea Mate 0 - 220623 - 202605Документ2 страницыTarea Mate 0 - 220623 - 202605MELANY MIRELLA FLORES RODRIGUEZОценок пока нет
- Aplica Geo PDFДокумент44 страницыAplica Geo PDFJean P Carrillo GonzalesОценок пока нет
- U2 MovimientoOndulatorio PDFДокумент101 страницаU2 MovimientoOndulatorio PDFJesus Arturo Coronado PortaОценок пока нет
- Aplazados 2019Документ5 страницAplazados 2019Javier Rodriguez CruzОценок пока нет
- Cuadricas: X y Z A B CДокумент4 страницыCuadricas: X y Z A B CRonald QuispeОценок пока нет
- Derivación de funciones de varias variables: conceptos clave y ejemplosДокумент35 страницDerivación de funciones de varias variables: conceptos clave y ejemploscxhxb777Оценок пока нет
- EjrciciosДокумент5 страницEjrcicioskedinОценок пока нет
- Clase5 Momentos Esperanza Matematica FCM 2022 IIДокумент7 страницClase5 Momentos Esperanza Matematica FCM 2022 IIRomildo Silva CuadrosОценок пока нет
- Análisis de elipses de error en distribuciones normales bidimensionalesДокумент27 страницAnálisis de elipses de error en distribuciones normales bidimensionalesSantiPrietoОценок пока нет
- Tablas de DerivadasДокумент1 страницаTablas de Derivadasacontreras68Оценок пока нет
- Actividad Derivadas ParcialesДокумент2 страницыActividad Derivadas ParcialesMayi RuizОценок пока нет
- Metodo GraficoДокумент6 страницMetodo Graficojuan lixisОценок пока нет
- Metodo GraficoДокумент6 страницMetodo Graficojuan lixisОценок пока нет
- PI S PHOS 13Документ2 страницыPI S PHOS 13juan lixisОценок пока нет
- Ejercicio de AbsorcionДокумент9 страницEjercicio de Absorcionjuan lixisОценок пока нет
- ContenidoДокумент111 страницContenidojuan lixisОценок пока нет
- Trabajo de EdoДокумент10 страницTrabajo de Edojuan lixisОценок пока нет
- Fundamentos de Quimica Analitica: SinopsisДокумент2 страницыFundamentos de Quimica Analitica: Sinopsisjuan lixisОценок пока нет
- Informe de Aletas - FenomenosДокумент19 страницInforme de Aletas - Fenomenosjuan lixisОценок пока нет
- Implantación de una planta para la producción de café de cebada en filtro con steviaДокумент8 страницImplantación de una planta para la producción de café de cebada en filtro con steviajuan lixisОценок пока нет
- 05 - Articulo Docente Problema CINETICA QUIMICA ArrheniusДокумент5 страниц05 - Articulo Docente Problema CINETICA QUIMICA ArrheniusQuimica TecnologiaОценок пока нет
- BesselДокумент1 страницаBesseljuan lixisОценок пока нет
- Panel Solar - TeoriaДокумент15 страницPanel Solar - TeoriaSambya Naysa Cardenas Candiotti0% (1)
- Fabricacion Del ModuloДокумент1 страницаFabricacion Del Modulojuan lixisОценок пока нет
- Informe de Laboratorio #2 de Fenomenos de TransporteДокумент29 страницInforme de Laboratorio #2 de Fenomenos de Transportejuan lixisОценок пока нет
- Informe FinДокумент29 страницInforme Finjuan lixisОценок пока нет
- Trabajo Academico SemanaДокумент1 страницаTrabajo Academico Semanajuan lixisОценок пока нет
- Balance energía mecánicaДокумент12 страницBalance energía mecánicaMoises Alcocer100% (1)
- CompresorasДокумент19 страницCompresorasjuan lixisОценок пока нет
- Analisis Numerico BasicoДокумент256 страницAnalisis Numerico BasicoJuniorOrtizОценок пока нет
- Metodos NumericosДокумент1 страницаMetodos Numericosjuan lixisОценок пока нет
- 2Документ94 страницы2LuckskyrОценок пока нет
- SimulacionДокумент15 страницSimulacionjuan lixisОценок пока нет
- Funcexcel PDFДокумент30 страницFuncexcel PDFMarcos GonzalezОценок пока нет
- Tiempo de descarga de un líquido en un tanque cilíndricoДокумент16 страницTiempo de descarga de un líquido en un tanque cilíndricojuan lixisОценок пока нет
- Apuntes de Clases 01 PDFДокумент58 страницApuntes de Clases 01 PDFjuan lixisОценок пока нет
- PlanosДокумент7 страницPlanosjuan lixisОценок пока нет
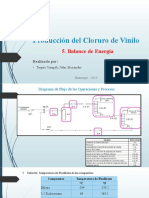
- Balance de EnergíaДокумент20 страницBalance de Energíajuan lixisОценок пока нет
- Apendice - Tarea 2 (1) (2) .Документ3 страницыApendice - Tarea 2 (1) (2) .HelenaescoОценок пока нет
- 2.4 Sistemas de Ecuaciones No LinealesДокумент30 страниц2.4 Sistemas de Ecuaciones No LinealesGui Do EspОценок пока нет
- Eje 2 Actividad GrupalДокумент1 страницаEje 2 Actividad GrupalMarlon Perez AndradeОценок пока нет
- Regla de Simpson: Aproximación cuadráticaДокумент4 страницыRegla de Simpson: Aproximación cuadráticaFranciscoLaraОценок пока нет
- Solución de Problemas de Transporte y AsignacionДокумент52 страницыSolución de Problemas de Transporte y Asignaciondany riveraОценок пока нет
- Función Cuadrática 2023Документ18 страницFunción Cuadrática 2023Daniel Archila AleyОценок пока нет
- Solucionario Unidad 04 - Matemáticas EdebéДокумент8 страницSolucionario Unidad 04 - Matemáticas EdebéAntonio LMОценок пока нет
- UNIDAD3Документ72 страницыUNIDAD3OsielОценок пока нет
- Ecuaciones Fraccionarias de Primer GradoДокумент14 страницEcuaciones Fraccionarias de Primer GradoAdriana AlmironОценок пока нет
- Problemas Tema 5Документ6 страницProblemas Tema 5DiegoОценок пока нет
- Lección 01 - PolinomiosДокумент10 страницLección 01 - PolinomiosthvОценок пока нет
- ReglasДокумент1 страницаReglaskarenthola 71153460Оценок пока нет
- Examen Final - Semana 8 - METODOS NUMERICOSДокумент7 страницExamen Final - Semana 8 - METODOS NUMERICOSJUAN JOSE CAMACHO MARTINEZОценок пока нет
- 2 Examen Semanal - ÁlgebraДокумент1 страница2 Examen Semanal - ÁlgebraWalter Torres QuiñonesОценок пока нет
- Regla de Simpson FinalДокумент14 страницRegla de Simpson FinalRoimer Rojas NuñezОценок пока нет
- Crucigrama Algebra 3rДокумент2 страницыCrucigrama Algebra 3rFelisa JoverОценок пока нет
- Investigacion de Operaciones - Eje 2Документ6 страницInvestigacion de Operaciones - Eje 2Fabio RubioОценок пока нет
- PolinomiosДокумент3 страницыPolinomiosKevin TtitoОценок пока нет
- Cap II y III RESOLUCIONДокумент30 страницCap II y III RESOLUCIONAnonymous UkRjK6Оценок пока нет
- TP Integrador P Final Calculo NumericoДокумент7 страницTP Integrador P Final Calculo NumericoZoe BetazzaОценок пока нет
- Expresiones AlgebraicasДокумент2 страницыExpresiones AlgebraicasMauricio MauОценок пока нет
- Ecuaciones-PolinomiosДокумент20 страницEcuaciones-PolinomiosCrisEr ParrChiОценок пока нет
- Corrección Haunted Castle Identidades NotablesДокумент4 страницыCorrección Haunted Castle Identidades NotablesEnder 8Оценок пока нет
- Actividad 2 AlgebraДокумент5 страницActividad 2 AlgebraSergio VazquezОценок пока нет
- Tarea 1 Clasificacion de PolinomiosДокумент3 страницыTarea 1 Clasificacion de PolinomiosJavierFloresОценок пока нет
- AlgebraДокумент63 страницыAlgebraDiego BendezuОценок пока нет
- SPLINEДокумент16 страницSPLINECesar VeraОценок пока нет
- Minimos CuadradosДокумент13 страницMinimos CuadradosBlanca Symmes LopeteguiОценок пока нет
- 3 Polinomios A UnoДокумент17 страниц3 Polinomios A UnoAlvaro PedrazaОценок пока нет