Вам также может понравиться
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОт EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОценок пока нет
- Micro ActuatorsДокумент10 страницMicro ActuatorsEyad A. FeilatОценок пока нет
- Erthing TransformerДокумент8 страницErthing Transformerbpd21Оценок пока нет
- Abel Emmanuel-2Документ13 страницAbel Emmanuel-2joshbinmollel112Оценок пока нет
- Diagnosis of The Short Circuit Duty of Power TransformersДокумент6 страницDiagnosis of The Short Circuit Duty of Power TransformerscisnatelОценок пока нет
- Abel Emmanuel 1Документ13 страницAbel Emmanuel 1joshbinmollel112Оценок пока нет
- Shunt ReactorsДокумент29 страницShunt ReactorsK Vijay Bhaskar ReddyОценок пока нет
- Ijcrr: A Study On Magnetorheological Fluid (MRF) DamperДокумент8 страницIjcrr: A Study On Magnetorheological Fluid (MRF) Damperaakrit paiОценок пока нет
- STD 1100-2005 - Part1Документ9 страницSTD 1100-2005 - Part1Ankur SangwanОценок пока нет
- Mems Dielectrics Charge TrappingДокумент17 страницMems Dielectrics Charge TrappingNguyễn Viết HuyОценок пока нет
- Shunt Reactor VibrationДокумент8 страницShunt Reactor VibrationmehmeteeeОценок пока нет
- tmp1741 TMPДокумент5 страницtmp1741 TMPFrontiersОценок пока нет
- Chapter Two Literature Review: 2.1 Introduction To Fault DetectionДокумент10 страницChapter Two Literature Review: 2.1 Introduction To Fault DetectionNazmul IslamОценок пока нет
- Contactless Energy TransferДокумент34 страницыContactless Energy TransferHarshith HarshОценок пока нет
- A Lecture On Current LimiterДокумент25 страницA Lecture On Current LimiterLavanya VallbhareddyОценок пока нет
- U3 ISAДокумент26 страницU3 ISAjeyrajiОценок пока нет
- Design and Simulation of 20 MVAR Three Phase Shunt Reactor For Voltage Suppression at 230 KV Transmission Line (Kyaukpyu Primary Substation)Документ10 страницDesign and Simulation of 20 MVAR Three Phase Shunt Reactor For Voltage Suppression at 230 KV Transmission Line (Kyaukpyu Primary Substation)umerОценок пока нет
- Capacitive Power Transfer For Rotor Field Current in Synchronous MachinesДокумент8 страницCapacitive Power Transfer For Rotor Field Current in Synchronous MachinesHuong ThaoОценок пока нет
- Earthing CalculationДокумент88 страницEarthing CalculationRamesh Epili100% (17)
- Mine Electrical PowerДокумент49 страницMine Electrical PowerZeph rox100% (1)
- Full Operational Range Dynamic Modeling of Microcantilever BeamsДокумент9 страницFull Operational Range Dynamic Modeling of Microcantilever BeamsAnjireddy ThatiparthyОценок пока нет
- IET EST Marine SFCL PreprintДокумент27 страницIET EST Marine SFCL PreprintrajeevОценок пока нет
- 7225-Ichve2010 - Jankov - HVDC System Performance With A Neutral Conductor - V1Документ5 страниц7225-Ichve2010 - Jankov - HVDC System Performance With A Neutral Conductor - V1Anonymous OpLDOPОценок пока нет
- Earthing CalculationДокумент91 страницаEarthing CalculationRamji RamakrishnanОценок пока нет
- Virginia Transformer - Developments in Traction TransformersДокумент10 страницVirginia Transformer - Developments in Traction TransformersTshepo Sharky SebeОценок пока нет
- 01 - Green - Inverter Based Micro-Grids - 1 Rev1Документ14 страниц01 - Green - Inverter Based Micro-Grids - 1 Rev1ivoОценок пока нет
- Electromagnetic Acoustic Transducers (EMATs) UtДокумент3 страницыElectromagnetic Acoustic Transducers (EMATs) Utcal2_uniОценок пока нет
- Electrodynamic Suspension: Navigation SearchДокумент7 страницElectrodynamic Suspension: Navigation SearchS_PRAVINAОценок пока нет
- Impact of Power Factor Regulation On Small-Signal Stability of Power Distribution Systems With Distributed Synchronous GeneratorsДокумент18 страницImpact of Power Factor Regulation On Small-Signal Stability of Power Distribution Systems With Distributed Synchronous GeneratorsApolo FumbujaОценок пока нет
- Unit 6: Substations: Prepared By: Er. Madhav P. Nagarkoti (Visiting Faculty)Документ43 страницыUnit 6: Substations: Prepared By: Er. Madhav P. Nagarkoti (Visiting Faculty)Dipesh YadavОценок пока нет
- A Brief Review of Actuation at The Micro-Scale UsiДокумент10 страницA Brief Review of Actuation at The Micro-Scale UsiMinh TrầnОценок пока нет
- Articol 9Документ6 страницArticol 9Constantin DorinelОценок пока нет
- OoooДокумент2 страницыOoooSrinivas MurthyОценок пока нет
- PW04Документ9 страницPW04HugoОценок пока нет
- Leakage Inductance Behavior of Power Transformer Windings Under Mechanical FaultsДокумент5 страницLeakage Inductance Behavior of Power Transformer Windings Under Mechanical Faultshosein bahramian habilОценок пока нет
- Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxja Sljxlassja Short-Circuit Design Forces in Power Lines and SubstationsДокумент14 страницIweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxja Sljxlassja Short-Circuit Design Forces in Power Lines and Substationsamit77999Оценок пока нет
- ,E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxjasljxlassja Short-Circuit Design Forces in Power Lines and SubstationsДокумент28 страниц,E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxjasljxlassja Short-Circuit Design Forces in Power Lines and Substationsamit77999Оценок пока нет
- Design and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock SwitchДокумент11 страницDesign and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock Switchhmsedighi459Оценок пока нет
- Khan2020 Article IntelligentControlOfANovelTranДокумент15 страницKhan2020 Article IntelligentControlOfANovelTranPablo Omar Luz PedemonteОценок пока нет
- Okjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxjasljxlassj A Short-Circuit Design Forces in Power Lines and SubstationsДокумент28 страницOkjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjkxjasljxlassj A Short-Circuit Design Forces in Power Lines and Substationsamit77999Оценок пока нет
- MEMS Actuators Driven by Lorentz Force: Jinling Yang and Jinying ZhangДокумент16 страницMEMS Actuators Driven by Lorentz Force: Jinling Yang and Jinying ZhangraulОценок пока нет
- Sola PaperДокумент6 страницSola PaperPablo di PasquoОценок пока нет
- Variable Shunt Reactors Cigre2014 A2 211 2014Документ8 страницVariable Shunt Reactors Cigre2014 A2 211 2014StrahinjaОценок пока нет
- A Short-Circuit Design Forces in Power Lines and SubstationsДокумент28 страницA Short-Circuit Design Forces in Power Lines and Substationsamit77999Оценок пока нет
- Modelling and Analysis of Electromechanical Stress in Transformers Caused by Short-CircuitsДокумент6 страницModelling and Analysis of Electromechanical Stress in Transformers Caused by Short-CircuitsJunaid YОценок пока нет
- 10 11648 J Sjee 20200804 11Документ10 страниц10 11648 J Sjee 20200804 11Apila NiangaОценок пока нет
- A Simple Sliding-Mesh Interface Procedure and Its Application To The CFD Simulation of A Tidal-Stream TurbineДокумент20 страницA Simple Sliding-Mesh Interface Procedure and Its Application To The CFD Simulation of A Tidal-Stream TurbineMurali K oe16d017Оценок пока нет
- Martina Calais Vassilios G. Agelidis: Pcalaism9Cc - Curtin.Edu - Au Vagelidis 9 Curtin. Edu. AuДокумент6 страницMartina Calais Vassilios G. Agelidis: Pcalaism9Cc - Curtin.Edu - Au Vagelidis 9 Curtin. Edu. Auknighthood4allОценок пока нет
- Multilevel Converters For Single-Phase Grid Connected Photovoltaic Systems. An OverviewДокумент11 страницMultilevel Converters For Single-Phase Grid Connected Photovoltaic Systems. An OverviewAnand RajkumarОценок пока нет
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerДокумент78 страницTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuОценок пока нет
- Ji32Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjk Xjasljxlassja Short-Circuit Design Forces in Power Lines and SubstationsДокумент14 страницJi32Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjk Xjasljxlassja Short-Circuit Design Forces in Power Lines and Substationsamit77999Оценок пока нет
- Eddy Current Braking SystemДокумент17 страницEddy Current Braking SystemMridul Bora100% (1)
- Trans 1Документ3 страницыTrans 1sanjeevmeilОценок пока нет
- Earth Fault ProtectionДокумент5 страницEarth Fault ProtectionQasim KhanОценок пока нет
- Eaton Magnetic Acutated Circuit BreakersДокумент5 страницEaton Magnetic Acutated Circuit BreakersmajesusОценок пока нет
- Insucon DWG p54Документ5 страницInsucon DWG p54yahyaupsefОценок пока нет
- Analysis of Electrical Grounding Design of Substation and Lines - Journal PublishedДокумент10 страницAnalysis of Electrical Grounding Design of Substation and Lines - Journal PublishedJames UjamОценок пока нет
- Ee ThesisДокумент28 страницEe ThesisEarl Jay UayanОценок пока нет
- Power System Stability Improvement Using FACTS DevicesДокумент7 страницPower System Stability Improvement Using FACTS DevicesEr. Amar KumarОценок пока нет
- Linear Systems: Prof Sung-Ho HurДокумент30 страницLinear Systems: Prof Sung-Ho HurYousef BilbeisiОценок пока нет
- Design of A Wide-Swing Cascode Beta Multiplier Current Reference PDFДокумент64 страницыDesign of A Wide-Swing Cascode Beta Multiplier Current Reference PDFYousef BilbeisiОценок пока нет
- Energyconservingtransducers 1009 HOMEWORK2 CabasetersДокумент27 страницEnergyconservingtransducers 1009 HOMEWORK2 CabasetersYousef BilbeisiОценок пока нет
- Class 6 Microactuators Mohammad KilaniДокумент32 страницыClass 6 Microactuators Mohammad KilaniYousef BilbeisiОценок пока нет
- 1 s2.0 S0167931709005784 Main PDFДокумент7 страниц1 s2.0 S0167931709005784 Main PDFYousef BilbeisiОценок пока нет
- COMSOLTutorial1 (Updated) PDFДокумент18 страницCOMSOLTutorial1 (Updated) PDFYousef BilbeisiОценок пока нет
- 1 Radarbasic Parti1 150114074029 Conversion gate02MOHEM PDFДокумент195 страниц1 Radarbasic Parti1 150114074029 Conversion gate02MOHEM PDFYousef BilbeisiОценок пока нет
- May 2004 Doc.: Ieee 802.11-03/802R23 Ieee P802.11 Wireless Lans Usage ModelsДокумент46 страницMay 2004 Doc.: Ieee 802.11-03/802R23 Ieee P802.11 Wireless Lans Usage ModelsYousef BilbeisiОценок пока нет
- September, 2017 IEEE P802.15-02/277r1-SG3a IEEE P802.15 Wireless Personal Area NetworksДокумент13 страницSeptember, 2017 IEEE P802.15-02/277r1-SG3a IEEE P802.15 Wireless Personal Area NetworksYousef BilbeisiОценок пока нет
- S C M Mimo S: Patial Hannel Odel For ImulationsДокумент46 страницS C M Mimo S: Patial Hannel Odel For ImulationsYousef BilbeisiОценок пока нет
- كل التعافر المتلبهبهДокумент30 страницكل التعافر المتلبهبهYousef BilbeisiОценок пока нет
- Analyzing Frequency Response of Inertial Mems PDFДокумент5 страницAnalyzing Frequency Response of Inertial Mems PDFYousef BilbeisiОценок пока нет
- May 2004 Doc.: IEEE 802.11-03/940r: Date: AuthorsДокумент49 страницMay 2004 Doc.: IEEE 802.11-03/940r: Date: AuthorsYousef BilbeisiОценок пока нет
- Lecture 2 RFIC System Overview PDFДокумент66 страницLecture 2 RFIC System Overview PDFYousef BilbeisiОценок пока нет
- 11 03 0161 03 0wng Indoor Mimo Wlan Channel ModelsДокумент43 страницы11 03 0161 03 0wng Indoor Mimo Wlan Channel ModelsYousef BilbeisiОценок пока нет
- MicrowaveДокумент23 страницыMicrowaveYousef BilbeisiОценок пока нет
- ch07 PDFДокумент39 страницch07 PDFYousef BilbeisiОценок пока нет
- Chapter 8 Operational Amplifier As A Black BoxДокумент47 страницChapter 8 Operational Amplifier As A Black BoxYousef BilbeisiОценок пока нет
- ECE 342 Solid-State Devices & Circuits 10. MOS AmplifiersДокумент24 страницыECE 342 Solid-State Devices & Circuits 10. MOS AmplifiersYousef BilbeisiОценок пока нет
- SCM 083 SCM Text v2.1Документ35 страницSCM 083 SCM Text v2.1Yousef BilbeisiОценок пока нет
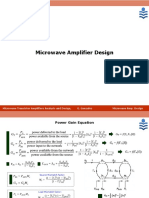
- Microwave Amplifier Design: Microwave Transistor Amplifiers Analysis and Design, G. Gonzalez Microwave Amp. DesignДокумент42 страницыMicrowave Amplifier Design: Microwave Transistor Amplifiers Analysis and Design, G. Gonzalez Microwave Amp. DesignYousef BilbeisiОценок пока нет
- Indoor MIMO WLAN Channel ModelsДокумент23 страницыIndoor MIMO WLAN Channel ModelsYousef BilbeisiОценок пока нет
- Taking A Closer Look at MIMO Radio SystemsДокумент6 страницTaking A Closer Look at MIMO Radio SystemsYousef BilbeisiОценок пока нет
- All Signals in Nature Are in Continuous TimeДокумент24 страницыAll Signals in Nature Are in Continuous TimeYousef BilbeisiОценок пока нет
- Department of Chemistry: Michael J. HynesДокумент55 страницDepartment of Chemistry: Michael J. HynesAndrés PacompíaОценок пока нет
- Acrylic PropertiesДокумент2 страницыAcrylic PropertiesMarc AlfredОценок пока нет
- Chemistry - 12Документ192 страницыChemistry - 12Gurusaran KalraОценок пока нет
- Mechanics of SolidsДокумент15 страницMechanics of Solidsselva1975Оценок пока нет
- Strain LifeДокумент11 страницStrain LifeChuoiEmОценок пока нет
- Pressure Relief ValveДокумент24 страницыPressure Relief Valvevinoth.kumarОценок пока нет
- CVR CLG Mech D Timetable 2-2nd SemДокумент2 страницыCVR CLG Mech D Timetable 2-2nd SemmohkristОценок пока нет
- AGARD-AR-323 Experimental Analytical Methods Pipe Ramjet PDFДокумент106 страницAGARD-AR-323 Experimental Analytical Methods Pipe Ramjet PDFmaurizio.desio4992Оценок пока нет
- Visually Estimating Oil Spill Thickness On Water: Standard Guide ForДокумент4 страницыVisually Estimating Oil Spill Thickness On Water: Standard Guide ForAhmad Zubair RasulyОценок пока нет
- CompressorДокумент6 страницCompressor吳晨維Оценок пока нет
- Sap ConcДокумент192 страницыSap ConcJose SanchezОценок пока нет
- STOC03 (Emissions)Документ20 страницSTOC03 (Emissions)tungluongОценок пока нет
- Recent Advances in Nanocomposite Soft Magnetic Materials A ReviewДокумент6 страницRecent Advances in Nanocomposite Soft Magnetic Materials A Reviewshameem siddiqueОценок пока нет
- Corrosion-Resistant Braze Joints: Novel, High-Chromium Containing Braze Filler MetalsДокумент4 страницыCorrosion-Resistant Braze Joints: Novel, High-Chromium Containing Braze Filler MetalsJorge Luis Olivar QuinteroОценок пока нет
- Characterization TechniquesДокумент8 страницCharacterization TechniquesAyush SinghОценок пока нет
- Tunneling-Like Wave Transmission in Non-Hermitian Lattices With Mirrored NonreciprocityДокумент6 страницTunneling-Like Wave Transmission in Non-Hermitian Lattices With Mirrored Nonreciprocitydonniedarko817Оценок пока нет
- Week 13Документ27 страницWeek 13josewilliam85Оценок пока нет
- The Causes and Effects of EarthquakesДокумент4 страницыThe Causes and Effects of EarthquakesKarma AkabaneОценок пока нет
- Acoustic Design of AuditoriumДокумент12 страницAcoustic Design of AuditoriumNur Fateha100% (2)
- Fluid Solutions World of ApplicationsДокумент4 страницыFluid Solutions World of ApplicationsMagin Idelfonso TorreblancaОценок пока нет
- The University of Nottingham: Answer ALL QuestionsДокумент15 страницThe University of Nottingham: Answer ALL QuestionsusgsusgsОценок пока нет
- QPAMBSC17Документ789 страницQPAMBSC17jonnaОценок пока нет
- Instrument Air CalculationДокумент11 страницInstrument Air CalculationMohammad Mehdi Jafari67% (3)
- Bruus H., Flensberg K. Many-Body Quantum Theory in Condensed Matter Physics (Web Draft, Kopenhagen, 2002) (352s) - PSQFTДокумент352 страницыBruus H., Flensberg K. Many-Body Quantum Theory in Condensed Matter Physics (Web Draft, Kopenhagen, 2002) (352s) - PSQFTdhancardinalОценок пока нет
- Flow Through NozzlesДокумент13 страницFlow Through NozzlesBharat SharmaОценок пока нет
- Finalversion PDFДокумент89 страницFinalversion PDFBhaskar SharmaОценок пока нет
- NASA Facts Earth Observing System Microwave Limb SounderДокумент4 страницыNASA Facts Earth Observing System Microwave Limb SounderBob AndrepontОценок пока нет
- Mil PRF 49291D PDFДокумент23 страницыMil PRF 49291D PDFMehdi RezagholipourОценок пока нет
- 3rd Q Science 2022-2023Документ2 страницы3rd Q Science 2022-2023Richard CruzОценок пока нет
- 10.1007@978 94 024 0867 6 PDFДокумент735 страниц10.1007@978 94 024 0867 6 PDFutsav_koshtiОценок пока нет