Вам также может понравиться
- Statics Lecture No 1 & 2 PDFДокумент57 страницStatics Lecture No 1 & 2 PDFAli AhmadОценок пока нет
- Engineering Mechanics: StaticsДокумент31 страницаEngineering Mechanics: StaticsMuhammad Fazeel KhanОценок пока нет
- Dynamics Lecture No 1 & 2 NewwДокумент60 страницDynamics Lecture No 1 & 2 NewwLeo KhanОценок пока нет
- ME211: Engineering Mechanics: Dynamics: InstructorДокумент60 страницME211: Engineering Mechanics: Dynamics: InstructorUsama Bin Zahid Muhammad ZahidОценок пока нет
- ME101: Engineering Mechanics: Statics: InstructorДокумент51 страницаME101: Engineering Mechanics: Statics: InstructorSalman HaideriiОценок пока нет
- Engineering Mechanics PDFДокумент78 страницEngineering Mechanics PDFSanthosh Mahesh100% (1)
- EEE - 2105 - L1 To 3 - UploadДокумент78 страницEEE - 2105 - L1 To 3 - UploadKISAKYE MOSESОценок пока нет
- Engg-Mechanics IntroductionДокумент79 страницEngg-Mechanics IntroductionDr. Pankaj KumarОценок пока нет
- Numerical SДокумент82 страницыNumerical Smuhammad adilОценок пока нет
- CES2104 Lecture 1 - Introduction To Statics PDFДокумент23 страницыCES2104 Lecture 1 - Introduction To Statics PDFCarlitos AdarnaОценок пока нет
- Engineering Mechanics For Civil Engr.Документ112 страницEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- MEC420 Chapter 1 - Part 1 - StudentДокумент31 страницаMEC420 Chapter 1 - Part 1 - StudentMuhammad Azizi bin Abd AzizОценок пока нет
- StaticsДокумент95 страницStaticsJohn SmithОценок пока нет
- Applied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreДокумент82 страницыApplied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreUmer RazaqОценок пока нет
- Chapter 1Документ121 страницаChapter 1f_manyalОценок пока нет
- M1-Unit - 2 Civil Introduction 2018-19Документ46 страницM1-Unit - 2 Civil Introduction 2018-19Arjun Sharma VОценок пока нет
- EEE - 2105 - L1 To 2Документ20 страницEEE - 2105 - L1 To 2KISAKYE MOSESОценок пока нет
- Lecture 1 Statics. Basic Concepts and AxiomsДокумент38 страницLecture 1 Statics. Basic Concepts and AxiomsДана Қарасайқызы100% (1)
- Introduciton To Engineering Statics Mechanics.Документ33 страницыIntroduciton To Engineering Statics Mechanics.Fawad KhanОценок пока нет
- Principles of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesДокумент34 страницыPrinciples of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesDaniella SabacОценок пока нет
- EM PPT II SemДокумент398 страницEM PPT II SemsridharanОценок пока нет
- Engineering MechanicsДокумент76 страницEngineering MechanicsGophop HdudОценок пока нет
- Module IДокумент27 страницModule IManikandan SriramОценок пока нет
- Engineering Mechanics ME 231: Lets Wait For 5 MinutesДокумент119 страницEngineering Mechanics ME 231: Lets Wait For 5 Minutesroger12 soiОценок пока нет
- Two Dimensional Force SystemДокумент50 страницTwo Dimensional Force SystemLinux WorldОценок пока нет
- Engineering MechanicsДокумент112 страницEngineering Mechanicsch pavan kumarОценок пока нет
- ME211 Week1Документ14 страницME211 Week1bm7gyygjtfОценок пока нет
- Mecánica de Cuerpos Rígidos (Introducción A La Estática)Документ24 страницыMecánica de Cuerpos Rígidos (Introducción A La Estática)Kevin RodriguezОценок пока нет
- Mecánica de Cuerpos Rígidos (Introducción A La Estática)Документ24 страницыMecánica de Cuerpos Rígidos (Introducción A La Estática)Kevin RodriguezОценок пока нет
- 1-Basic ConceptsДокумент47 страниц1-Basic Conceptsjaved hussainОценок пока нет
- 18ENG15 - Module 02Документ49 страниц18ENG15 - Module 02Prasidh Umesh ShettyОценок пока нет
- Engineering MechanicsДокумент18 страницEngineering MechanicsRaj ManovaОценок пока нет
- Applied Mechanics Chapter1Документ35 страницApplied Mechanics Chapter1Mohan Babu YadavОценок пока нет
- Physics Definitions, Laws and PrinciplesДокумент22 страницыPhysics Definitions, Laws and Principleskaziba stephen100% (1)
- Mechanics of Solids by Crandall, Dahl, Lardner, 1st ChapterДокумент121 страницаMechanics of Solids by Crandall, Dahl, Lardner, 1st Chapterpurijatin100% (2)
- Chapter 1 Basic of StaticsДокумент42 страницыChapter 1 Basic of StaticsTewodros AliОценок пока нет
- Lecture 1Документ37 страницLecture 1Ayush SinghОценок пока нет
- Unit-1&2 Engineering MechanicsДокумент15 страницUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanОценок пока нет
- COE 2001 Statics - Lecture 1 - IntroductionДокумент22 страницыCOE 2001 Statics - Lecture 1 - Introductionremino1Оценок пока нет
- Unit I Engineering Mechanics - StaticsДокумент17 страницUnit I Engineering Mechanics - Staticsbpal1970Оценок пока нет
- Ch00 Introduction To DynamicsДокумент25 страницCh00 Introduction To Dynamicsjose antonio villena medina100% (1)
- SKAA 1213 - Engineering Mechanics: Rosli Anang Dr. Mohd Yunus Ishak DR. Tan Cher SiangДокумент5 страницSKAA 1213 - Engineering Mechanics: Rosli Anang Dr. Mohd Yunus Ishak DR. Tan Cher Siangizyannn8950Оценок пока нет
- ME1222 - 1. Background & Basic KnowledgeДокумент21 страницаME1222 - 1. Background & Basic KnowledgeNidushan NethsaraОценок пока нет
- Engineering Mechanics I (Stat) Handout-1-14Документ14 страницEngineering Mechanics I (Stat) Handout-1-14Hamlity SaintataОценок пока нет
- FME IntroductionsДокумент9 страницFME IntroductionsBUTEX YEОценок пока нет
- Chapter 1 6. 1 - Introduction PDFДокумент8 страницChapter 1 6. 1 - Introduction PDFecercОценок пока нет
- Chapter 1 - Introduction To MechanicsДокумент14 страницChapter 1 - Introduction To MechanicsrushdiОценок пока нет
- IntroductionДокумент11 страницIntroductionvinodh159Оценок пока нет
- Final Unit-1A (EME-151,152)Документ17 страницFinal Unit-1A (EME-151,152)guptakrish330Оценок пока нет
- Rigid Body DynamicsДокумент86 страницRigid Body Dynamicssureshkumarga100% (1)
- Ch01-9thintroduction4 (E-Learning)Документ25 страницCh01-9thintroduction4 (E-Learning)Đỗ Văn CaoОценок пока нет
- Lecture Slides 1-2Документ30 страницLecture Slides 1-2themarvelbeastОценок пока нет
- Statics and Dynamics: Second Semester 2017-2018 Mr. Mohammed Tareq Petroleum and Mining Engineering DepartmentДокумент9 страницStatics and Dynamics: Second Semester 2017-2018 Mr. Mohammed Tareq Petroleum and Mining Engineering Departmentملاك محمدОценок пока нет
- Module 1Документ146 страницModule 1DARSAN DEVANANDОценок пока нет
- DOMM Lect4 Dynamics Fundamentals Part1Документ4 страницыDOMM Lect4 Dynamics Fundamentals Part1Ayush BhadauriaОценок пока нет
- Engineering Mechanics Lecture # 01: Engr. Waqar Ahmad M. SC Structural EngineeringДокумент28 страницEngineering Mechanics Lecture # 01: Engr. Waqar Ahmad M. SC Structural EngineeringENGR MUHAMMAD NOMANОценок пока нет
- 3 KinematicsДокумент30 страниц3 KinematicsJerry PratamaОценок пока нет
- Dynamics Week 1aДокумент7 страницDynamics Week 1adonatchangeОценок пока нет
- Itp On Indian Currency Itp Indian CurrencyДокумент84 страницыItp On Indian Currency Itp Indian Currencyapi-3819350Оценок пока нет
- BT101 - Introductory Biology (SKELETAL SYSTEM) DR - Navin Gupta Dept of BSBE, IIT GuwahatiДокумент34 страницыBT101 - Introductory Biology (SKELETAL SYSTEM) DR - Navin Gupta Dept of BSBE, IIT GuwahatiRohan MittalОценок пока нет
- 3 PDFДокумент1 страница3 PDFRohan MittalОценок пока нет
- Engineering Workshop Lab ManualДокумент74 страницыEngineering Workshop Lab ManualAnkushОценок пока нет
- BT101 - Introductory Biology (NERVOUS SYSTEM) DR - Navin Gupta Dept of BSBE, IIT GuwahatiДокумент41 страницаBT101 - Introductory Biology (NERVOUS SYSTEM) DR - Navin Gupta Dept of BSBE, IIT GuwahatiRohan MittalОценок пока нет
- BT101 - Introductory Biology (Sensory Systems-Ear/Eye) DR - Navin Gupta Dept of BSBE, IIT GuwahatiДокумент24 страницыBT101 - Introductory Biology (Sensory Systems-Ear/Eye) DR - Navin Gupta Dept of BSBE, IIT GuwahatiRohan MittalОценок пока нет
- BT101 - Introductory Biology (Sensory Systems-Ear/Eye) DR - Navin Gupta Dept of BSBE, IIT GuwahatiДокумент24 страницыBT101 - Introductory Biology (Sensory Systems-Ear/Eye) DR - Navin Gupta Dept of BSBE, IIT GuwahatiRohan MittalОценок пока нет
- ME101 Midsem 2020 PDFДокумент2 страницыME101 Midsem 2020 PDFRohan MittalОценок пока нет
- Lecture 26-28 Kinetics of Particles PDFДокумент76 страницLecture 26-28 Kinetics of Particles PDFRohan MittalОценок пока нет
- ME 101-Lecture 22-25-Kinematics of A Particle PDFДокумент67 страницME 101-Lecture 22-25-Kinematics of A Particle PDFRohan MittalОценок пока нет
- ME101 Midsem 2020 PDFДокумент2 страницыME101 Midsem 2020 PDFRohan MittalОценок пока нет
- Presentation PromptДокумент9 страницPresentation PromptRohan MittalОценок пока нет
- Grant, R - A Historical Introduction To The New TestamentДокумент11 страницGrant, R - A Historical Introduction To The New TestamentPaulo d'OliveiraОценок пока нет
- 01sample - Petition For Compulsory Recognition - rrp10182020Документ3 страницы01sample - Petition For Compulsory Recognition - rrp10182020Madam JudgerОценок пока нет
- Kajian 24 KitabДокумент2 страницыKajian 24 KitabSyauqi .tsabitaОценок пока нет
- A Choral FanfareДокумент5 страницA Choral FanfareAdão RodriguesОценок пока нет
- Tift County Board of Commissioners - Press Release July 25, 2022Документ3 страницыTift County Board of Commissioners - Press Release July 25, 2022WFXL_NewsОценок пока нет
- Rickshaw IndividualismДокумент5 страницRickshaw Individualismoakster510Оценок пока нет
- Fitzgerald TransformationOpenSource 2006Документ13 страницFitzgerald TransformationOpenSource 2006muthu.manikandan.mОценок пока нет
- Banking Sector Reforms: by Bhupinder NayyarДокумент18 страницBanking Sector Reforms: by Bhupinder NayyarPraveen SinghОценок пока нет
- Chapter 20 Mutual Fund IndustryДокумент55 страницChapter 20 Mutual Fund IndustryrohangonОценок пока нет
- Peavey Valveking 100 212Документ12 страницPeavey Valveking 100 212whitestratОценок пока нет
- 6 Kalimas of Islam With English TranslationДокумент5 страниц6 Kalimas of Islam With English TranslationAfaz RahmanОценок пока нет
- Vak Dec. '21 PDFДокумент28 страницVak Dec. '21 PDFMuralidharanОценок пока нет
- Akbayan Vs AquinoДокумент2 страницыAkbayan Vs AquinoAlyssa Clarizze MalaluanОценок пока нет
- 140933Документ86 страниц140933D27Оценок пока нет
- ADR PresentationДокумент9 страницADR PresentationAshraf AliОценок пока нет
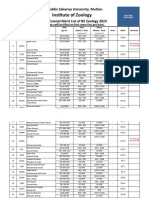
- 5953-6th Merit List BS Zool 31-8-2023Документ22 страницы5953-6th Merit List BS Zool 31-8-2023Muhammad AttiqОценок пока нет
- The Village Reporter - October 15th, 2014 PDFДокумент20 страницThe Village Reporter - October 15th, 2014 PDFthevillagereporterОценок пока нет
- PAS 7 and PAS 41 SummaryДокумент5 страницPAS 7 and PAS 41 SummaryCharles BarcelaОценок пока нет
- Candlestick Charting: Quick Reference GuideДокумент24 страницыCandlestick Charting: Quick Reference GuideelisaОценок пока нет
- MURS320: Vishay General SemiconductorДокумент5 страницMURS320: Vishay General SemiconductorAgustin DiocaОценок пока нет
- 86A141FH16-iCare InstallationДокумент26 страниц86A141FH16-iCare Installationaccel2008Оценок пока нет
- Combizell MHEC 40000 PRДокумент2 страницыCombizell MHEC 40000 PRToXiC RabbitsОценок пока нет
- Sameer Vs NLRCДокумент2 страницыSameer Vs NLRCRevz Lamoste100% (1)
- October 2010 Business Law & Taxation Final Pre-BoardДокумент11 страницOctober 2010 Business Law & Taxation Final Pre-BoardPatrick ArazoОценок пока нет
- Rent Agreement FormatДокумент2 страницыRent Agreement Formatrahul_gulrajani7615Оценок пока нет
- Request For Inspection: Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282Документ1 страницаRequest For Inspection: Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282ZaidiОценок пока нет
- Chapter 8. Griffiths-Conservation Laws 8.2Документ19 страницChapter 8. Griffiths-Conservation Laws 8.2Sami Tsegu ShewanОценок пока нет
- Create An Informational Flyer AssignmentДокумент4 страницыCreate An Informational Flyer AssignmentALEEHA BUTTОценок пока нет
- Cases NOvember 21Документ31 страницаCases NOvember 21Wilfredo Guerrero IIIОценок пока нет
- JIGL-Chapter5 (Administrative Law)Документ21 страницаJIGL-Chapter5 (Administrative Law)KHUSHBOO SHARMAОценок пока нет