Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- CignalДокумент5 страницCignalJared DanqueОценок пока нет
- IMC Pertemuan 1Документ33 страницыIMC Pertemuan 1bubble blueОценок пока нет
- Content Analysis On TV AdsДокумент5 страницContent Analysis On TV AdsAli NadeemОценок пока нет
- Sworn Statement SampleДокумент1 страницаSworn Statement SampleEnule EnuleОценок пока нет
- InstaPDF - in Aadhaar Card Address Change Form 470Документ1 страницаInstaPDF - in Aadhaar Card Address Change Form 470Toyesh Mondal100% (2)
- Online Marketing Strategy For: Aci Foods LTD BDДокумент40 страницOnline Marketing Strategy For: Aci Foods LTD BDSanatan SikderОценок пока нет
- SOC345 Chapter Summary 6Документ4 страницыSOC345 Chapter Summary 6Jacov SmithОценок пока нет
- Bharti Airtel Services LTD.: Your Account Summary This Month'S ChargesДокумент4 страницыBharti Airtel Services LTD.: Your Account Summary This Month'S ChargesVinesh SinghОценок пока нет
- Instructional Media: Presented By: Claire Anne CleofasДокумент7 страницInstructional Media: Presented By: Claire Anne CleofasKean KimОценок пока нет
- MAU FILE EXCEL KE HOACH MARKETING - XLSMДокумент15 страницMAU FILE EXCEL KE HOACH MARKETING - XLSMDo ManhОценок пока нет
- ĐÁP ÁN ĐỀ THI THỬ ĐẠI HỌC SỐ 12Документ11 страницĐÁP ÁN ĐỀ THI THỬ ĐẠI HỌC SỐ 12Ngọc Thảo100% (1)
- TemplatesДокумент3 страницыTemplatesJAYDIPVDОценок пока нет
- Salesmap Update 21 September 2022Документ737 страницSalesmap Update 21 September 2022Erafone BanyuwangiОценок пока нет
- TX-32PK20F D Serv - Manual 2 PDFДокумент47 страницTX-32PK20F D Serv - Manual 2 PDFTodor BojidarovОценок пока нет
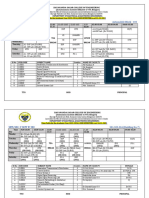
- V SEMESTER Class TT - 2023-24Документ2 страницыV SEMESTER Class TT - 2023-24Pranjal singhОценок пока нет
- BA2022 Morth JanaДокумент7 страницBA2022 Morth JanaTriesna SUdewaОценок пока нет
- Dimensionamento LongarinaДокумент12 страницDimensionamento LongarinaLarissa BianchiniОценок пока нет
- ROLE PLAY, Quiz-4Документ5 страницROLE PLAY, Quiz-4ismail malikОценок пока нет
- Agenda Training For PWD/ WWD On SRH and Advocacy ObjectivesДокумент2 страницыAgenda Training For PWD/ WWD On SRH and Advocacy ObjectivesAmaka CeciliaОценок пока нет
- Pitching Features To Observer's Imogen CarterДокумент12 страницPitching Features To Observer's Imogen CarterCulture Comms0% (1)
- Evantage - Architecting On AWS 5.4 (EN) - Lab GuideДокумент81 страницаEvantage - Architecting On AWS 5.4 (EN) - Lab Guidewalter alzateОценок пока нет
- Passionist Sisters' School Upper Cahilsot Calumpang General Santos CityДокумент6 страницPassionist Sisters' School Upper Cahilsot Calumpang General Santos Cityfranz anthonyОценок пока нет
- Grila DigitalДокумент1 страницаGrila DigitalOctavian BobesiuОценок пока нет
- Oral Communication-Types of Speech ContextsДокумент2 страницыOral Communication-Types of Speech ContextsJOVIE GABUTANОценок пока нет
- Law of Attraction Scripting Template: Detailed Instructions and More Ideas: FREE 60-Second Quiz (Very Insightful!)Документ4 страницыLaw of Attraction Scripting Template: Detailed Instructions and More Ideas: FREE 60-Second Quiz (Very Insightful!)Ana MОценок пока нет
- Amanda Brooks - The Internet Escort's Handbook Book 2 - Advertising and Marketing - Successfully Creating and Selling Your Image Online-Golden Girl Press, LLC (2009)Документ1 335 страницAmanda Brooks - The Internet Escort's Handbook Book 2 - Advertising and Marketing - Successfully Creating and Selling Your Image Online-Golden Girl Press, LLC (2009)Claudia Horeanu100% (1)
- CV Vincent BuitelaarДокумент2 страницыCV Vincent BuitelaarVincent BuitelaarОценок пока нет
- The Business Model Canvas: Key Partners Key ActivitiesДокумент2 страницыThe Business Model Canvas: Key Partners Key ActivitiesHarjot SinghОценок пока нет
- CAE Prep Course (C1) - Writing - Part 2 - LetterДокумент22 страницыCAE Prep Course (C1) - Writing - Part 2 - LetterBeatriz Blanco RossiОценок пока нет
- Colorful Pastel Cute Creative Kids Zone PresentationДокумент7 страницColorful Pastel Cute Creative Kids Zone PresentationMaulidatul HusnaОценок пока нет