Вам также может понравиться
- Tarea Examen Individual. Espacios Vectoriales - Ala1 - Uam - 21iДокумент3 страницыTarea Examen Individual. Espacios Vectoriales - Ala1 - Uam - 21iMarco MarkovnikovОценок пока нет
- Ilovepdf MergedДокумент19 страницIlovepdf MergedAdriana AmrОценок пока нет
- FuncionesДокумент64 страницыFuncionesWilliam SaaОценок пока нет
- BrachoДокумент2 страницыBrachoUriel OsvaldoОценок пока нет
- 02 - Algebra (Rectas y Planos) (Respuestas)Документ19 страниц02 - Algebra (Rectas y Planos) (Respuestas)Miguel Enrique Márquez CorreaОценок пока нет
- Calculo Vectorial. EjemplosДокумент7 страницCalculo Vectorial. EjemplosPaola Juliethe BurgosОценок пока нет
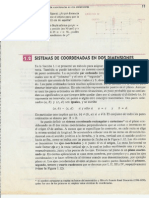
- Sec 1.2 Sistemas Coordenados en Dos DimensionesДокумент10 страницSec 1.2 Sistemas Coordenados en Dos DimensionesElena SantaОценок пока нет
- 3.1 Rectas en El EspacioДокумент14 страниц3.1 Rectas en El Espacio2021 Act HERNANDEZ MOTA LUIS FERNANDOОценок пока нет
- A Rectas y Planos PDFДокумент8 страницA Rectas y Planos PDFFernando F CabezasОценок пока нет
- Ejercicios Complementarios Cap 5 Vectores R 2 y R 3Документ10 страницEjercicios Complementarios Cap 5 Vectores R 2 y R 3josebadillasОценок пока нет
- Taller 3 GAV 2023-I PDFДокумент5 страницTaller 3 GAV 2023-I PDFMarcelo NoeОценок пока нет
- Not. Geo.a Ing2Документ3 страницыNot. Geo.a Ing2Areli OrtizОценок пока нет
- Fase 4 - Tarea 2 Algebra LinealДокумент8 страницFase 4 - Tarea 2 Algebra Linealmayra uchimaОценок пока нет
- Lectura 1Документ44 страницыLectura 1Richard MoralesОценок пока нет
- Guia Mat-Rectas y Planos en El EspacioДокумент8 страницGuia Mat-Rectas y Planos en El EspacioMariana ArévaloОценок пока нет
- Ejercicios Vectorial Lista 1 y 2Документ32 страницыEjercicios Vectorial Lista 1 y 2Obed Ramales100% (1)
- Ejercicios de Álgebra (Respuestas)Документ19 страницEjercicios de Álgebra (Respuestas)FrancoОценок пока нет
- Vectores en - R3Документ19 страницVectores en - R3franfigeac3094Оценок пока нет
- Recta en PlanoДокумент11 страницRecta en PlanoMiguel Angel Cornejo AriasОценок пока нет
- Sistemas de Coordenadas y LugaresДокумент12 страницSistemas de Coordenadas y LugaresAmIn20122Оценок пока нет
- Taller 3 Vectores R2 y R3Документ4 страницыTaller 3 Vectores R2 y R3Yimi Camilo Hurtado OliverosОценок пока нет
- Ecuación ParamétricaДокумент24 страницыEcuación ParamétricaMagda De LeonОценок пока нет
- Parametrizacion CurvasДокумент12 страницParametrizacion CurvasMANUEL ARIZAОценок пока нет
- Evidenciamate 3Документ23 страницыEvidenciamate 3daniel salazarОценок пока нет
- Tarea2 100408 234Документ28 страницTarea2 100408 234Jerikson Acero100% (1)
- Geometría Analítica Del EspacioДокумент34 страницыGeometría Analítica Del EspacioAMYNNXXXXОценок пока нет
- Actividad 2 Calculo MultivariadoДокумент7 страницActividad 2 Calculo MultivariadoAndres Fernando100% (1)
- Distancias - Deducciones de FórmulasДокумент6 страницDistancias - Deducciones de FórmulasGiuliana PérezОценок пока нет
- Clase21 El Plano CartesianoДокумент4 страницыClase21 El Plano Cartesianonicolas dionisio ordonez barrueta100% (1)
- Sentencias OCTAVEДокумент3 страницыSentencias OCTAVEEder Coronado DinarteОценок пока нет
- Algebra RespuestasДокумент10 страницAlgebra RespuestasposeidonОценок пока нет
- Geometria Analitica EspacialДокумент8 страницGeometria Analitica EspacialXavier PilcoОценок пока нет
- Ejercicio 4 y 5 Ejercicio EcuacionesДокумент3 страницыEjercicio 4 y 5 Ejercicio EcuacionesViviana maria Bolivar barrancoОценок пока нет
- Geometría Del EspacioДокумент8 страницGeometría Del Espacioana yicelaОценок пока нет
- Relacion01 PDFДокумент10 страницRelacion01 PDFAvilezDannyОценок пока нет
- Introducción A Vectores en R3Документ21 страницаIntroducción A Vectores en R3Guillermo Delgado CastilloОценок пока нет
- Matematica VectorialДокумент99 страницMatematica VectorialGuido Paredes MurielОценок пока нет
- TP 43 (R)Документ11 страницTP 43 (R)Fabian PazОценок пока нет
- SuperficiesДокумент43 страницыSuperficiesMauricio MoralesОценок пока нет
- Ejercicios P4 - GAV - 2021 - II - SoluciónДокумент25 страницEjercicios P4 - GAV - 2021 - II - SoluciónErica Acjuta CasquinoОценок пока нет
- Conceptos Importantes Semanas 4 5 6 2021 2Документ12 страницConceptos Importantes Semanas 4 5 6 2021 2Josue MorenoОценок пока нет
- Mapa Conceptual Fase 2Документ14 страницMapa Conceptual Fase 2pablo auxОценок пока нет
- de Práctica Semana 02Документ18 страницde Práctica Semana 02Jordy Aquino LopezОценок пока нет
- Espacio Vectorial Tridimensional y Lineas RectasДокумент9 страницEspacio Vectorial Tridimensional y Lineas RectasJBCristopherОценок пока нет
- LinealДокумент7 страницLinealArbey PalechorОценок пока нет
- de Práctica Semana 04Документ18 страницde Práctica Semana 04Jhoan Eliseo Mendoza VásquezОценок пока нет
- 90 Vectores Ejercicios ResueltosДокумент19 страниц90 Vectores Ejercicios Resueltosartur1930Оценок пока нет
- Unidad I, As IIIДокумент26 страницUnidad I, As IIICoseki CosmeОценок пока нет
- Geometria 2 Bachiller PDFДокумент9 страницGeometria 2 Bachiller PDFSole NietoОценок пока нет
- 12Документ3 страницы12Martín BustamanteОценок пока нет
- Tema 9 Ecuaciones de Rectas y PlanosДокумент5 страницTema 9 Ecuaciones de Rectas y PlanosPablo MuñozОценок пока нет
- VECTORES1Документ59 страницVECTORES1Ayrton Estrada SotoОценок пока нет
- Matematica - TaareaДокумент13 страницMatematica - TaareaMaricielo Saravia F.Оценок пока нет
- Sistema de Coordenadas CartesianasДокумент52 страницыSistema de Coordenadas CartesianasAmIn20122Оценок пока нет
- Matematicas para Ingenieros - Planos en El Espacio Parte 2Документ4 страницыMatematicas para Ingenieros - Planos en El Espacio Parte 2cosmofloydОценок пока нет
- Operaciones y Procesos UnitariosДокумент273 страницыOperaciones y Procesos UnitariosIngrid Vega67% (3)
- Diseño de Puentes Tesis Ing Guzman PDFДокумент98 страницDiseño de Puentes Tesis Ing Guzman PDFCarlos GuzmanОценок пока нет
- Diseño EstructuralДокумент160 страницDiseño EstructuralMilton MaldonadoОценок пока нет
- Tesis Diseño de Edificio Zapata Combinada y GradasДокумент227 страницTesis Diseño de Edificio Zapata Combinada y GradasMilton MaldonadoОценок пока нет
- Folleto 46Документ199 страницFolleto 46pescanova2Оценок пока нет
- Infraestructura Vial en GuatemalaДокумент126 страницInfraestructura Vial en GuatemalaMilton MaldonadoОценок пока нет
- Analisis de Edificios A Base de Marcos Rigidos de Concreto Reforzado en Zonas SismicasДокумент266 страницAnalisis de Edificios A Base de Marcos Rigidos de Concreto Reforzado en Zonas SismicasMilton MaldonadoОценок пока нет
- Ingeniería Vial I Escrito Por Hugo Andrés Morales SosaДокумент46 страницIngeniería Vial I Escrito Por Hugo Andrés Morales SosaMamani Luque Oscar86% (7)
- ACI 352RS-2002 Diseño de Conexiones Viga-Columna en Estructuras Monolíticas de Concreto ReforzadoДокумент64 страницыACI 352RS-2002 Diseño de Conexiones Viga-Columna en Estructuras Monolíticas de Concreto ReforzadoMilton Maldonado100% (2)
- Diseño EstructuralДокумент160 страницDiseño EstructuralMilton MaldonadoОценок пока нет
- Columnas de Concreto Armado Segun ACIДокумент122 страницыColumnas de Concreto Armado Segun ACIMilton MaldonadoОценок пока нет
- CementoДокумент10 страницCementoMilton MaldonadoОценок пока нет
- Geometria Proyectiva 1Документ21 страницаGeometria Proyectiva 1unmundoagradableОценок пока нет
- DEFINICIÓN DE VectoresДокумент11 страницDEFINICIÓN DE Vectoresdante jovani gonzalez lopezОценок пока нет
- Guía Concepción Espacial 16 17Документ10 страницGuía Concepción Espacial 16 17Monica Gil NogalesОценок пока нет
- TP N°3Документ3 страницыTP N°3Matias ChuquelОценок пока нет
- Informe DilerДокумент27 страницInforme DilerEmanecers Cardenas OrtegaОценок пока нет
- Examen Selectividad Pau Dibujo Tecnico 2004 Jun PDFДокумент6 страницExamen Selectividad Pau Dibujo Tecnico 2004 Jun PDFJuan AlberolaОценок пока нет
- GUIA PTA No 8 Matematica Grado 9. Distancia Entre Dos Puntos.-2Документ3 страницыGUIA PTA No 8 Matematica Grado 9. Distancia Entre Dos Puntos.-2eliana palenciaОценок пока нет
- 4to. Año - GEOM - Guía 1 - Nociones Básicas de GeomДокумент9 страниц4to. Año - GEOM - Guía 1 - Nociones Básicas de GeomnoeliaОценок пока нет
- Malla Matematicas QuintoДокумент8 страницMalla Matematicas QuintoGabriela LlanosОценок пока нет
- GMETSISREP - Geometría Métrica y Sistemas de RepresentaciónДокумент11 страницGMETSISREP - Geometría Métrica y Sistemas de RepresentaciónAlmircar Sanchez PeredoОценок пока нет
- 2.2 Vectores y Geometria. Problemas Repaso.Документ18 страниц2.2 Vectores y Geometria. Problemas Repaso.Kevin Tapia RagasОценок пока нет
- Sesión 5Документ19 страницSesión 5Anghelly MirandaОценок пока нет
- Numeros ComplejosДокумент16 страницNumeros ComplejosCarlos EafОценок пока нет
- BMA03 Álgebra Lineal PDFДокумент3 страницыBMA03 Álgebra Lineal PDFTonny Aspur CuadrosОценок пока нет
- Vectores en Sistemas de CoordenadasДокумент8 страницVectores en Sistemas de CoordenadasAlvaro Matias Lapi MoreiraОценок пока нет
- Equilibrio de Sistema General de Las Fuerzas en El PlanoДокумент6 страницEquilibrio de Sistema General de Las Fuerzas en El PlanoMáac Ángel Miguel Alarcón CruzОценок пока нет
- Origen y Desarrollo de La GeometríaДокумент12 страницOrigen y Desarrollo de La GeometríamarjorieОценок пока нет
- Geometria 3456Документ5 страницGeometria 3456diegoОценок пока нет
- 2.estructura Cristalina y Amorfa PDFДокумент28 страниц2.estructura Cristalina y Amorfa PDFSergioA-tОценок пока нет
- Informe Tecnico Pedagogico Final 2019Документ13 страницInforme Tecnico Pedagogico Final 2019Marcelino PrudencioОценок пока нет
- Representaciones OrtograficasДокумент5 страницRepresentaciones OrtograficasJunior HuancaОценок пока нет
- Orientación en Un Pozo VerticalДокумент5 страницOrientación en Un Pozo VerticalJuan Francisco CabreraОценок пока нет
- Diagrama de Flujo GenericoДокумент119 страницDiagrama de Flujo GenericoJose G Lopez100% (1)
- Cantidad EscalarДокумент6 страницCantidad EscalarNathan Drake100% (2)
- Tolerencias Geometricas IntroДокумент8 страницTolerencias Geometricas IntroDaved storiesОценок пока нет
- Normas IRAM 2009 de Dibujo TécnicoДокумент373 страницыNormas IRAM 2009 de Dibujo TécnicoFacundo Nahuel Carrizo Vizzoni100% (6)
- Ejes y Centros de SimetriaДокумент4 страницыEjes y Centros de Simetriaarquimedes68Оценок пока нет
- Geometria Traslacion RotacionДокумент5 страницGeometria Traslacion RotacionSebastian Gutierrez Ramayo100% (1)
- Cifras SignificativasДокумент4 страницыCifras SignificativasEmanuel CalderonОценок пока нет
- Semana 4 Automatizacion Plantilla Del VideoДокумент17 страницSemana 4 Automatizacion Plantilla Del VideoIvan Arnulfo Buitrago LozanoОценок пока нет