Вам также может понравиться
- Sel Relay Trip CurveДокумент8 страницSel Relay Trip CurveAnonymous dH3DIEtzОценок пока нет
- Rem 615Документ5 страницRem 615Hari haran100% (1)
- Commissioning Report Alcad 110V PDFДокумент26 страницCommissioning Report Alcad 110V PDFkarakoukasОценок пока нет
- SR61CДокумент3 страницыSR61CSubramaniam NPОценок пока нет
- P 220 Testing ProcedureДокумент8 страницP 220 Testing ProcedureRanjit Rjt100% (3)
- Setting Sheet of 7UM622 For 25MW GPRДокумент16 страницSetting Sheet of 7UM622 For 25MW GPRSrini100% (1)
- Micom P211 Three-Phase Motor Protection Relay: Energy Automation & InformationДокумент10 страницMicom P211 Three-Phase Motor Protection Relay: Energy Automation & InformationAONLAОценок пока нет
- 07a Backup OCEF Relay - Tech. Data Check List CompletedДокумент6 страниц07a Backup OCEF Relay - Tech. Data Check List CompletedAnupam0103Оценок пока нет
- 7UM6 Gen Prot-Schemes EДокумент10 страниц7UM6 Gen Prot-Schemes EruslaninstОценок пока нет
- p345 Relay Test ReportДокумент23 страницыp345 Relay Test Reportbig bad wolfОценок пока нет
- Calculate Idmt PDFДокумент6 страницCalculate Idmt PDFShuvan MabuОценок пока нет
- IDMT Relay SettingДокумент1 страницаIDMT Relay SettingJeya KannanОценок пока нет
- 487E Test Current Calculator - 13JAN2010Документ3 страницы487E Test Current Calculator - 13JAN2010Eric Dondebzanga100% (1)
- Start Inhibit FunctionДокумент11 страницStart Inhibit Functionlimkokchiang809Оценок пока нет
- Distance Protection Relay of LineДокумент11 страницDistance Protection Relay of LineYahya DarОценок пока нет
- P225 TestingДокумент2 страницыP225 TestingMuthu Kumar100% (1)
- 7SK80 Protection of Medium-Power Motors A1 PDFДокумент11 страниц7SK80 Protection of Medium-Power Motors A1 PDFpothirajОценок пока нет
- Pre-Commissioning Test Report For Numerical Relay: ProjectДокумент3 страницыPre-Commissioning Test Report For Numerical Relay: ProjectHari haranОценок пока нет
- Ici-C&C/Seupptcl/A - S (Sup.) /2011-12/001: Tested by WitnessedДокумент7 страницIci-C&C/Seupptcl/A - S (Sup.) /2011-12/001: Tested by WitnessedkamarajkanОценок пока нет
- Presentación P 442 Con PSLДокумент148 страницPresentación P 442 Con PSLRichard Callo CОценок пока нет
- Spaj140c1 PDFДокумент29 страницSpaj140c1 PDFRihlesh ParlОценок пока нет
- Calculation of Stabilizing Resistor in High Impedance Differential Protection - Electrical ConceptsДокумент13 страницCalculation of Stabilizing Resistor in High Impedance Differential Protection - Electrical ConceptsABHINAV SAURAVОценок пока нет
- GVK TP For DAVRДокумент10 страницGVK TP For DAVRPankajОценок пока нет
- GT Relay Testing FormatДокумент7 страницGT Relay Testing FormatVk Sumanth100% (1)
- P 220 Testing ProcedureДокумент8 страницP 220 Testing ProcedureMuthu Kumar100% (2)
- Directional OverДокумент28 страницDirectional OverEdinson Milton Gaona BarbozaОценок пока нет
- Micom P40 Agile: Ge Grid SolutionsДокумент868 страницMicom P40 Agile: Ge Grid SolutionsNOVASKY De Paula e CarvalhoОценок пока нет
- Differential Relay SlopeДокумент6 страницDifferential Relay SlopeNADEEM KHANОценок пока нет
- Ret650 Diif 1Документ7 страницRet650 Diif 1logaknathanОценок пока нет
- Areva p343 (Oc, NPS, Thermal - Cal With Formula)Документ14 страницAreva p343 (Oc, NPS, Thermal - Cal With Formula)eswaran005Оценок пока нет
- II.2 AS-shate-Jalawiyyah Line Protn Set - 2Документ5 страницII.2 AS-shate-Jalawiyyah Line Protn Set - 2Jay WinОценок пока нет
- Testing of Relays and Detailed ProcedureДокумент30 страницTesting of Relays and Detailed Proceduresetyo nugrohoОценок пока нет
- OC SettingsДокумент2 страницыOC Settingsdkandh0% (1)
- P633 - Test - Tools Farhad Rev 01Документ4 страницыP633 - Test - Tools Farhad Rev 01Mosa Elnaid ElnaidОценок пока нет
- High Impedance Restricted Earth Fault Protection: Answers For EnergyДокумент40 страницHigh Impedance Restricted Earth Fault Protection: Answers For EnergyWildan erik77Оценок пока нет
- Project Name: Dcu Test Report For Motor Protection RelayДокумент4 страницыProject Name: Dcu Test Report For Motor Protection RelayArul Kumar100% (1)
- MiCOM IDMT Curves CalculatorДокумент2 страницыMiCOM IDMT Curves CalculatorYigit SarıkayaОценок пока нет
- Example Settings For Applying The SEL-487B To A Six-Breaker BusДокумент24 страницыExample Settings For Applying The SEL-487B To A Six-Breaker Busu2andresОценок пока нет
- Abb Rec670 Cap Bank ProtnДокумент11 страницAbb Rec670 Cap Bank ProtnRatheesh KumarОценок пока нет
- SIEMENS-7SA522 Setting CalculationДокумент20 страницSIEMENS-7SA522 Setting Calculationnaran19794735Оценок пока нет
- Knee Point Voltage Calculation: DataДокумент1 страницаKnee Point Voltage Calculation: DataPRATHAM SARANОценок пока нет
- Motor ProtectionДокумент7 страницMotor ProtectionAbhijit KumarОценок пока нет
- Motor Protection SiemensДокумент10 страницMotor Protection SiemensViviane MaiaОценок пока нет
- High Set 1 (Is-HS1) & High Set 2 (Is-HS2) and Its Calculation - Electrical ConceptsДокумент5 страницHigh Set 1 (Is-HS1) & High Set 2 (Is-HS2) and Its Calculation - Electrical ConceptsAdam AbrahamОценок пока нет
- VDT - 877 - Annexure-IAДокумент176 страницVDT - 877 - Annexure-IAprati121100% (1)
- Overload Relay Setting and CalculationДокумент2 страницыOverload Relay Setting and CalculationLaurence MalanumОценок пока нет
- JVS Manual JRP 011Документ12 страницJVS Manual JRP 011Tamilventhan_sОценок пока нет
- Testing Procedure For Transformer Differential Protection Relay Using Conventional KitДокумент14 страницTesting Procedure For Transformer Differential Protection Relay Using Conventional KitRavi MehroliyaОценок пока нет
- Ict-1 Test ReportДокумент41 страницаIct-1 Test ReportSuresh Chandra PadhyОценок пока нет
- Non Dir. O/C Relay ARGUS - 7SR1102: 1. General Data & InformationДокумент6 страницNon Dir. O/C Relay ARGUS - 7SR1102: 1. General Data & InformationAnonymous dH3DIEtzОценок пока нет
- Overcurrent and Overload Protection Using Protective Relays: Electricity and New EnergyДокумент73 страницыOvercurrent and Overload Protection Using Protective Relays: Electricity and New EnergyKaisar PrimaОценок пока нет
- Different Philosophy Used For Generator Reverse-Low Forward Power Rotection R1Документ5 страницDifferent Philosophy Used For Generator Reverse-Low Forward Power Rotection R1Yadav AkhileshОценок пока нет
- 06-Presentation Motor ProtectionДокумент47 страниц06-Presentation Motor ProtectionshanmuonmОценок пока нет
- 05-Presentation Motor ProtectionДокумент47 страниц05-Presentation Motor ProtectionRajesh Pillai100% (5)
- 1 GE Format Motor Protection - Single SessionДокумент53 страницы1 GE Format Motor Protection - Single SessionDileep GantaОценок пока нет
- Acceleration Characteristics: Torque X Speed Curve For Designs "N" and "H"Документ14 страницAcceleration Characteristics: Torque X Speed Curve For Designs "N" and "H"TrungPhamОценок пока нет
- Protection Scheme Dia: Motor Prot. RelayДокумент9 страницProtection Scheme Dia: Motor Prot. RelayPradipta Kumar MohantyОценок пока нет
- 2 Motor Protection Alstom - No Iet LogoДокумент72 страницы2 Motor Protection Alstom - No Iet LogosayedmhОценок пока нет
- TYN 682 - TYN 692: FeaturesДокумент4 страницыTYN 682 - TYN 692: FeaturesAlejandro BolañosОценок пока нет
- 97 Design PDFДокумент8 страниц97 Design PDFKhaled RabeaОценок пока нет
- Cross Limit Switch Lambda / AlphaДокумент8 страницCross Limit Switch Lambda / AlphaKhaled RabeaОценок пока нет
- Enclosure Accessories Catalog SectionДокумент52 страницыEnclosure Accessories Catalog SectionKhaled RabeaОценок пока нет
- New Technology For Control Panel DesignДокумент8 страницNew Technology For Control Panel DesignKhaled RabeaОценок пока нет
- Class C vs. Class D: TechnicalДокумент1 страницаClass C vs. Class D: TechnicalKhaled RabeaОценок пока нет
- Cross Limit Switch Series Alpha Item Code ALP006Документ3 страницыCross Limit Switch Series Alpha Item Code ALP006Khaled RabeaОценок пока нет
- Misia Overload Limiter (Grey)Документ5 страницMisia Overload Limiter (Grey)Khaled RabeaОценок пока нет
- Name Plate: Specifications:: SensorschutzbeschaltungДокумент3 страницыName Plate: Specifications:: SensorschutzbeschaltungKhaled RabeaОценок пока нет
- 15P0056B1 - Ams90 - 1 - en - R03 - Half-Controlled Acdc Single-Phase DriveДокумент20 страниц15P0056B1 - Ams90 - 1 - en - R03 - Half-Controlled Acdc Single-Phase DriveKhaled RabeaОценок пока нет
- Assembly and Operation Manual: Geared Motor, Type TPДокумент15 страницAssembly and Operation Manual: Geared Motor, Type TPKhaled Rabea0% (1)
- Electromagnets and Electropermanent Magnets For Coils HandlingДокумент2 страницыElectromagnets and Electropermanent Magnets For Coils HandlingKhaled RabeaОценок пока нет
- Static Relays: Static Relays Are Superior To Electro-Magnetic Relays in The Following AspectsДокумент7 страницStatic Relays: Static Relays Are Superior To Electro-Magnetic Relays in The Following AspectsKhaled RabeaОценок пока нет
- Electronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceДокумент29 страницElectronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceKhaled RabeaОценок пока нет
- Instruction Manual: TCR - MC TypeДокумент20 страницInstruction Manual: TCR - MC TypeKhaled RabeaОценок пока нет
- Qi-Power Meter-485-300Документ2 страницыQi-Power Meter-485-300Khaled RabeaОценок пока нет
- Chapter 7Документ15 страницChapter 7Khaled RabeaОценок пока нет
- Bus Bar: Bus Bars, Bus Duct, Cable Bus and CablesДокумент29 страницBus Bar: Bus Bars, Bus Duct, Cable Bus and CablesKhaled RabeaОценок пока нет
- Rotary Encoder PDFДокумент8 страницRotary Encoder PDFKhaled RabeaОценок пока нет
- Current Derating For Yaskawa 1000-Series DrivesДокумент16 страницCurrent Derating For Yaskawa 1000-Series DrivesKhaled RabeaОценок пока нет
- 96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Документ20 страниц96722599-B68L-54 Quick Start - (V100R001 01, En, SI, L)Marco Alejandro Flores BarrazaОценок пока нет
- Brushless DC MotorsДокумент21 страницаBrushless DC MotorsKiran KumarОценок пока нет
- Practical 8: Foundation of Engineering School of Engineering Taylor's University MalaysiaДокумент7 страницPractical 8: Foundation of Engineering School of Engineering Taylor's University Malaysiapokemon khaiОценок пока нет
- Welding TerminologyДокумент17 страницWelding TerminologyAndreea TimiserОценок пока нет
- Chang-Joon LeeДокумент1 страницаChang-Joon LeeCJ LeeОценок пока нет
- Frequency Diverse MIMO Techniques For RadarДокумент22 страницыFrequency Diverse MIMO Techniques For RadarNamith DevadigaОценок пока нет
- IEEE Guide For Array and Battery Sizing in Stand-Alone Photovoltaic (PV) SystemsДокумент34 страницыIEEE Guide For Array and Battery Sizing in Stand-Alone Photovoltaic (PV) SystemsJimmy F Hernandez100% (1)
- PosiTector 6000 Full Manual 7.1Документ30 страницPosiTector 6000 Full Manual 7.1Ctr YlОценок пока нет
- Manual: iSTAT I400 Standard TransducerДокумент62 страницыManual: iSTAT I400 Standard TransducerMehdi_Mashayekhi_172Оценок пока нет
- A Novel High-Gain DC-DC Converter Applied in Fuel Cell VehiclesДокумент13 страницA Novel High-Gain DC-DC Converter Applied in Fuel Cell Vehiclesrock starОценок пока нет
- Data Sheet MR-3Документ2 страницыData Sheet MR-3shlashmedОценок пока нет
- TC-P50C2: 50 Inch Class 720p Plasma HDTVДокумент95 страницTC-P50C2: 50 Inch Class 720p Plasma HDTVRonald CastellarОценок пока нет
- AIRIS II Standard DetailsДокумент20 страницAIRIS II Standard Detailsiqbal meerОценок пока нет
- TSX303 DS EncleanedДокумент4 страницыTSX303 DS EncleanedEduardo ToroОценок пока нет
- Burglar 2Документ6 страницBurglar 2sarbualexandruОценок пока нет
- Domekt R 300 VДокумент1 страницаDomekt R 300 Vaaaaaaa330208193Оценок пока нет
- Automated Comparator: Radian Research, IncДокумент97 страницAutomated Comparator: Radian Research, IncManuel Lavado SilvaОценок пока нет
- Lenovo SL400Документ94 страницыLenovo SL400Abhilash VamanОценок пока нет
- Datasheet 16F887Документ288 страницDatasheet 16F887thienhoang156Оценок пока нет
- 3phase TSDДокумент114 страниц3phase TSDSridhar Chigati100% (3)
- Altistart 48 ManualДокумент84 страницыAltistart 48 ManualSohaib Khalid100% (1)
- Experiment-3 30KV Insulation TesterДокумент4 страницыExperiment-3 30KV Insulation TesterAbhinav SinhaОценок пока нет
- Fa Lambda Zup3612Документ56 страницFa Lambda Zup3612doce12Оценок пока нет
- Voice Over IP (VoIP)Документ54 страницыVoice Over IP (VoIP)Peter R. Egli100% (1)
- Reference Manual: ModelДокумент162 страницыReference Manual: ModelrassesОценок пока нет
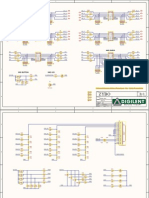
- PG 3 ZYBO - SCHДокумент13 страницPG 3 ZYBO - SCHanuptonemeОценок пока нет
- A History of The Invention of The Transistor and Where It Will Lead UsДокумент9 страницA History of The Invention of The Transistor and Where It Will Lead UstthenryОценок пока нет
- Installers Manual Sliding Door AutomationДокумент55 страницInstallers Manual Sliding Door AutomationSidney Moraes AlvesОценок пока нет
- P30series (메뉴얼)Документ72 страницыP30series (메뉴얼)Luân ThànhОценок пока нет
- RGMO Frequency Influence SchemeДокумент1 страницаRGMO Frequency Influence SchemeJitendra SharmaОценок пока нет