Вам также может понравиться
- Engineering DrawingДокумент738 страницEngineering DrawingArnab Saha100% (1)
- How To Steal Wifi - Wifi Password 2Документ11 страницHow To Steal Wifi - Wifi Password 2Anonymous C7H7wS60% (1)
- LTSpice HelpДокумент135 страницLTSpice HelpSpiros LoutridisОценок пока нет
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОт EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОценок пока нет
- Flame Scanner Sensor PDFДокумент36 страницFlame Scanner Sensor PDFGhuna UcihaОценок пока нет
- GeneralДокумент50 страницGeneralwaleedyehia100% (2)
- Advanced Computer Architecture - Unit 1 - WWW - Rgpvnotes.inДокумент20 страницAdvanced Computer Architecture - Unit 1 - WWW - Rgpvnotes.inAyushi AgarwalОценок пока нет
- On DcsДокумент36 страницOn DcsAnkit Meena100% (1)
- Reduced Instruction Set Computer (Risc) 32bit Processor On Field Programmable Gate Arrays (Fpgas) ImplementationДокумент5 страницReduced Instruction Set Computer (Risc) 32bit Processor On Field Programmable Gate Arrays (Fpgas) ImplementationDr. Krishna N. SharmaОценок пока нет
- Co Unit2 Part2Документ10 страницCo Unit2 Part2Manjushree N.SОценок пока нет
- Unit III Control Unit DesignДокумент45 страницUnit III Control Unit DesigntsangwanОценок пока нет
- 2.1 CU CPU Control Unit DesignДокумент49 страниц2.1 CU CPU Control Unit Designprakuld04Оценок пока нет
- Control UnitДокумент4 страницыControl Unitdivine iyawaОценок пока нет
- Unit No: III: Micro Programmed ControlДокумент7 страницUnit No: III: Micro Programmed ControlbhargaviОценок пока нет
- Unit III NotesДокумент12 страницUnit III NotesLakshmi Narayana PОценок пока нет
- Logic: Digital CircuitДокумент12 страницLogic: Digital Circuitاحمد عباسОценок пока нет
- COA Chapter 4 NotesДокумент4 страницыCOA Chapter 4 Notesanand kumarОценок пока нет
- HenzonzzzzДокумент5 страницHenzonzzzzapi-548516280Оценок пока нет
- Micro Program Control UnitДокумент27 страницMicro Program Control UnitNaman GuptaОценок пока нет
- CO2: 1. Concept of Program Execution/InterpretationДокумент22 страницыCO2: 1. Concept of Program Execution/InterpretationYasmeen SyedОценок пока нет
- ARM Processor Fundamentals: (Note: MAC Multiply-Accumulate Unit)Документ18 страницARM Processor Fundamentals: (Note: MAC Multiply-Accumulate Unit)Amy OliverОценок пока нет
- Chapter 03Документ4 страницыChapter 03John doeОценок пока нет
- Glossary of Terminology: (Mark IV, Mark V Gas Turbine Control System)Документ12 страницGlossary of Terminology: (Mark IV, Mark V Gas Turbine Control System)Vignesh SvОценок пока нет
- Lecture 2 - Typical Embedded SystemДокумент5 страницLecture 2 - Typical Embedded SystemrhodonelduatinОценок пока нет
- 32 Bit Risc ProcessorДокумент60 страниц32 Bit Risc ProcessorMuruganantham MuthusamyОценок пока нет
- 10th Lecture: Multiple-Issue Processors: Please Recall: Branch PredictionДокумент28 страниц10th Lecture: Multiple-Issue Processors: Please Recall: Branch PredictionSohei LaОценок пока нет
- 10.define Embedded SystemsДокумент4 страницы10.define Embedded Systems20EUMT047 NARENDRAN M SОценок пока нет
- Toaz - Info Project On Honeywell Tdc3000 Dcs PRДокумент77 страницToaz - Info Project On Honeywell Tdc3000 Dcs PRMorad MouradОценок пока нет
- Module 5Документ7 страницModule 5cosmiclove7353Оценок пока нет
- The Design of SVPWM Waveform Generator Based On CPLD - DSP: Software EngineeringДокумент7 страницThe Design of SVPWM Waveform Generator Based On CPLD - DSP: Software EngineeringAshagre MekuriaОценок пока нет
- Coa Unit-3Документ35 страницCoa Unit-3Revanth RavikantiОценок пока нет
- 5 PipelineДокумент63 страницы5 Pipeline1352 : NEEBESH PADHYОценок пока нет
- 6MB Telecontrol System: 6MB552 Compact Remote Terminal UnitДокумент12 страниц6MB Telecontrol System: 6MB552 Compact Remote Terminal Unitfayssal salvadorОценок пока нет
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.От EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Оценок пока нет
- Chapter1 DEK3133Документ67 страницChapter1 DEK3133dgkanade72Оценок пока нет
- Control Unit: The Control Unit Is A Sequential Circuit Which Initiates All Micro-Operations in The Data ProcessorДокумент14 страницControl Unit: The Control Unit Is A Sequential Circuit Which Initiates All Micro-Operations in The Data ProcessormarahimruОценок пока нет
- Unit III Part 1 Microprogramming NotesДокумент10 страницUnit III Part 1 Microprogramming NotesKiranmai KonduruОценок пока нет
- Low-Cost FPGA Based Antenna Pattern Measurement SystemДокумент4 страницыLow-Cost FPGA Based Antenna Pattern Measurement SystemErkut YumrukayaОценок пока нет
- Department of Computer Science & Engineering and Information TechnologyДокумент8 страницDepartment of Computer Science & Engineering and Information Technology22- Aakriti guptaОценок пока нет
- Computer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaДокумент40 страницComputer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaFredy F RОценок пока нет
- Embedded SystemДокумент24 страницыEmbedded Systemmai elsayedОценок пока нет
- Unit 2 - Computer System Organisation - WWW - Rgpvnotes.inДокумент8 страницUnit 2 - Computer System Organisation - WWW - Rgpvnotes.inmukulgrd1Оценок пока нет
- Chapter 1 Microcomputer System - Peripheral DesignДокумент70 страницChapter 1 Microcomputer System - Peripheral DesignJevithaОценок пока нет
- Unit 1 - Computer System Organisation - WWW - Rgpvnotes.inДокумент13 страницUnit 1 - Computer System Organisation - WWW - Rgpvnotes.inmukulgrd1Оценок пока нет
- Srmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BДокумент8 страницSrmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BPandiaraj RajОценок пока нет
- COA Unit 3Документ31 страницаCOA Unit 3O ParvezОценок пока нет
- Cpen ReviewerДокумент8 страницCpen Reviewerkeithleene trinidadОценок пока нет
- Continuation 4TH Unit DpacoДокумент18 страницContinuation 4TH Unit DpacoSANJAY KASI VISVANATHANОценок пока нет
- Data Manipulation: Computer Science: An Overview Tenth Edition by Kai-Lung HuaДокумент30 страницData Manipulation: Computer Science: An Overview Tenth Edition by Kai-Lung Hua廖涵語Оценок пока нет
- Chapter 5Документ48 страницChapter 5hub23Оценок пока нет
- COA Lecture 16 17Документ20 страницCOA Lecture 16 17Chhaveesh AgnihotriОценок пока нет
- So-It-Chapter-3-Computer Architecture PDFДокумент35 страницSo-It-Chapter-3-Computer Architecture PDFSumit SoniОценок пока нет
- Computer Organization Module 5Документ27 страницComputer Organization Module 51RN19CS033 Chidwan RameshОценок пока нет
- Lecture 11Документ74 страницыLecture 11hiệp nguyễnОценок пока нет
- Unit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inДокумент6 страницUnit 4 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONОценок пока нет
- CAG216D - Slides - 01 Microcomputer Systems 13sДокумент12 страницCAG216D - Slides - 01 Microcomputer Systems 13sBee Jon CeeОценок пока нет
- Lecture 3-Hardware Architecture (Part 2)Документ17 страницLecture 3-Hardware Architecture (Part 2)Huy NguyễnОценок пока нет
- Microprogrammed PDFДокумент9 страницMicroprogrammed PDFNANUVALA TIRUPATHIОценок пока нет
- Final COA-CO1-MODIFIEDДокумент83 страницыFinal COA-CO1-MODIFIEDAswith ReddyОценок пока нет
- Wa0017.Документ29 страницWa0017.R ChanduОценок пока нет
- Chapter TwoДокумент14 страницChapter TwoAbdissaTadeseОценок пока нет
- Module 3 NotesДокумент10 страницModule 3 NotesAmal MonichanОценок пока нет
- Micro Programmed ControlДокумент24 страницыMicro Programmed Controlapi-26870484100% (8)
- Unit 2 - Computer Organization and Architecture - WWW - Rgpvnotes.inДокумент25 страницUnit 2 - Computer Organization and Architecture - WWW - Rgpvnotes.inrk.chakrawartiОценок пока нет
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsОт EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsОценок пока нет
- MLPerf - Vision Behind MLPerfДокумент62 страницыMLPerf - Vision Behind MLPerfJack PurcherОценок пока нет
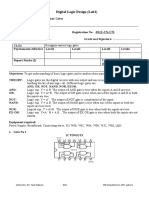
- DLD Lab 1Документ5 страницDLD Lab 1tm tigerОценок пока нет
- (Specification Book) SMART Hospitality Display - Middle East&AfricaДокумент52 страницы(Specification Book) SMART Hospitality Display - Middle East&AfricaAsifОценок пока нет
- Aspire 5580 SpecificationsДокумент5 страницAspire 5580 SpecificationsElena Piniano VipinosaОценок пока нет
- Service Manual SM17 - 002 - 083.00: Latching Boom Mechanism RetrofitДокумент24 страницыService Manual SM17 - 002 - 083.00: Latching Boom Mechanism RetrofitErissonОценок пока нет
- Device ManagementДокумент57 страницDevice Managementjobster1967Оценок пока нет
- User Manual IPS-2042PДокумент44 страницыUser Manual IPS-2042Poring2012Оценок пока нет
- PM0019l - Explosion-Proof LAK Series BeaconsДокумент2 страницыPM0019l - Explosion-Proof LAK Series BeaconsImran TajОценок пока нет
- ADMC201Документ15 страницADMC201Ariana Ribeiro LameirinhasОценок пока нет
- GVN 53 Series Product Specifications 4-12-07Документ3 страницыGVN 53 Series Product Specifications 4-12-07Vincent Chua100% (1)
- Sepam Series 80 UndervoltageДокумент3 страницыSepam Series 80 Undervoltagedinakaran2020Оценок пока нет
- Trailer Roadtrain Module - Y095620-EN-001Документ4 страницыTrailer Roadtrain Module - Y095620-EN-001SAABОценок пока нет
- Oil Dielectric Test Sets: 0-60 Kvac and 0-100 KvacДокумент3 страницыOil Dielectric Test Sets: 0-60 Kvac and 0-100 KvacNurhadi SukmanaОценок пока нет
- CPAP - Applications - Medical - Microchip Technology Inc - PDFДокумент3 страницыCPAP - Applications - Medical - Microchip Technology Inc - PDFRene Gonzales Vasquez100% (1)
- Axioo Tripio Laptop Dell Vaio Avita BisaДокумент1 страницаAxioo Tripio Laptop Dell Vaio Avita BisamakhsusОценок пока нет
- Loops, File, and Random NumbersДокумент32 страницыLoops, File, and Random NumbersWeeHong NgeoОценок пока нет
- Pub088 001 00 - 0515Документ16 страницPub088 001 00 - 0515Lorenzo GabrielliОценок пока нет
- Sony Ericsson z770 Service ManualДокумент71 страницаSony Ericsson z770 Service ManualvinegereОценок пока нет
- IPTVДокумент18 страницIPTVSarvesh PatelОценок пока нет
- Ub Cam Pro ManualДокумент18 страницUb Cam Pro ManualSlađa ObradovićОценок пока нет
- AOTS Company Profile - 2023Документ21 страницаAOTS Company Profile - 2023Nicki Susan AlexОценок пока нет
- GS Orakom - M3Документ16 страницGS Orakom - M3kuro inuОценок пока нет
- Product Manual 26659 (Revision C, 6/2016) : Proact™ P-Series FL Position ControllerДокумент110 страницProduct Manual 26659 (Revision C, 6/2016) : Proact™ P-Series FL Position ControllernachoborjasОценок пока нет
- Red Hat Enterprise Linux-6-Storage Administration Guide-En-USДокумент209 страницRed Hat Enterprise Linux-6-Storage Administration Guide-En-UScresmakОценок пока нет
- Q250 SM Pneumatic Spinning WrenchДокумент11 страницQ250 SM Pneumatic Spinning WrenchGianna FrolaОценок пока нет