Вам также может понравиться
- Mathematical Solution Unifying the Four Fundamental Forces in NatureОт EverandMathematical Solution Unifying the Four Fundamental Forces in NatureОценок пока нет
- 3.model Visco-ElasticityДокумент25 страниц3.model Visco-ElasticityopabalekeОценок пока нет
- Lecture 4 - ViscoelasticДокумент50 страницLecture 4 - ViscoelasticHani Syakira NordinОценок пока нет
- Lecture 20Документ14 страницLecture 20Martha Isabel SernaОценок пока нет
- 2010 Lecture 7 Viscoelastic Models Part2Документ6 страниц2010 Lecture 7 Viscoelastic Models Part2heartwin1Оценок пока нет
- EBB 220/3 Model For Visco-ElasticityДокумент25 страницEBB 220/3 Model For Visco-ElasticityBen MiSawoОценок пока нет
- Rheological ModelsДокумент14 страницRheological ModelsCHEENIE MAE SAGUNОценок пока нет
- Chap. 6 MSMBM Design Sem IДокумент95 страницChap. 6 MSMBM Design Sem IPrafulla PatilОценок пока нет
- ViscoelasticityДокумент11 страницViscoelasticitymchilwesaОценок пока нет
- Elements of Polymer Structure and Viscoelasticity: David M. Parks Mechanics and Materials II 2.002 February 18, 2004Документ15 страницElements of Polymer Structure and Viscoelasticity: David M. Parks Mechanics and Materials II 2.002 February 18, 2004Jeffrey GuevaraОценок пока нет
- 2016-Module 2-L5Документ16 страниц2016-Module 2-L5Gy LiawОценок пока нет
- Viscoelasticity: ReferencesДокумент21 страницаViscoelasticity: Referencesletter_ashish4444Оценок пока нет
- Mechanical Properties of Materials: Samir Fernando Castilla Acevedo Chem E., M. Eng., Ph.D. StudentДокумент21 страницаMechanical Properties of Materials: Samir Fernando Castilla Acevedo Chem E., M. Eng., Ph.D. StudentMateo PerezОценок пока нет
- Viscoelastic Behavior of Polymers PDFДокумент9 страницViscoelastic Behavior of Polymers PDFchiuchan888Оценок пока нет
- Mechanical PropertiesДокумент77 страницMechanical PropertiesGerd FreeОценок пока нет
- Dynamic Mechanical Analysis (DMA)Документ17 страницDynamic Mechanical Analysis (DMA)nervthcОценок пока нет
- Conservation of Mass, Momentum and Energy in FEAДокумент48 страницConservation of Mass, Momentum and Energy in FEAAbdul WahabОценок пока нет
- (2015) Stress Relaxation, Creep and Set Recovery of ElastomersДокумент5 страниц(2015) Stress Relaxation, Creep and Set Recovery of ElastomersPhamОценок пока нет
- MOM-I Topic-3 Mechanical PropertiesДокумент44 страницыMOM-I Topic-3 Mechanical PropertiesNoor FatimaОценок пока нет
- Chapter 08 Viscoelastic BehaviourДокумент39 страницChapter 08 Viscoelastic BehaviourNaveed AhmadОценок пока нет
- Elastic and Viscoelastic Properties of MetalsДокумент11 страницElastic and Viscoelastic Properties of MetalsgunapalshettyОценок пока нет
- Viscoelasticity and Dynamic Mechanical Testing PDFДокумент7 страницViscoelasticity and Dynamic Mechanical Testing PDFaryanОценок пока нет
- Failure Theory For Piping MaterialДокумент29 страницFailure Theory For Piping MaterialsaadvikhasОценок пока нет
- Akışkanlar MekaniğiДокумент20 страницAkışkanlar Mekaniğiinş.müh.yasin yilmazОценок пока нет
- Polymeric Implant Materials, ViscoelasticityДокумент33 страницыPolymeric Implant Materials, Viscoelasticityrg1326Оценок пока нет
- Tensile Testing 1Документ59 страницTensile Testing 1api-376413983% (6)
- Rheology Fundamentals: Lecture Notes 2Документ19 страницRheology Fundamentals: Lecture Notes 2Osama HassanОценок пока нет
- Fatigue, Endurance Limit and Its Approximate Estimation, DesignДокумент9 страницFatigue, Endurance Limit and Its Approximate Estimation, DesignMelese AschalewОценок пока нет
- Generating Line Spectra From Experimental Response1Документ19 страницGenerating Line Spectra From Experimental Response1MEHDI FARROKHIОценок пока нет
- Chapter 1 (Part 1)Документ67 страницChapter 1 (Part 1)muhammadtalhabilal6666Оценок пока нет
- DSLL1Документ53 страницыDSLL1simon maaaklaОценок пока нет
- Schematic Models of Constitutive Behavior of Solid MaterialsДокумент4 страницыSchematic Models of Constitutive Behavior of Solid MaterialschoopoОценок пока нет
- Applied Thermodynamics ME322: (03 Credit Hours)Документ67 страницApplied Thermodynamics ME322: (03 Credit Hours)zakir abbasОценок пока нет
- SOM II Lab ManualДокумент34 страницыSOM II Lab ManualharshОценок пока нет
- Fatigue Strength and The S-N Diagram Study Notes For Mechanical EngineeringДокумент13 страницFatigue Strength and The S-N Diagram Study Notes For Mechanical Engineeringaditya.1540011Оценок пока нет
- Endurance Limit - Approximate EstimationДокумент37 страницEndurance Limit - Approximate EstimationDrSatnam SinghОценок пока нет
- Note 3 - Mechanics of Hard Tissues For ClassДокумент38 страницNote 3 - Mechanics of Hard Tissues For ClassjoyyeesufОценок пока нет
- Conflong CreepДокумент31 страницаConflong CreepAnonymous LMfIjpEОценок пока нет
- Chapter 15 Kinetics of Particle - Impulse & MomentumДокумент40 страницChapter 15 Kinetics of Particle - Impulse & MomentumZeeshan HaiderОценок пока нет
- Experiment Tensile Properities of MaterialsДокумент8 страницExperiment Tensile Properities of MaterialsDr.L.V.PRASAD MeesaragandaОценок пока нет
- 15 ViscoelasticityДокумент30 страниц15 ViscoelasticityaderancОценок пока нет
- Lecture Notes Transport Phenomena CHEP 211Документ90 страницLecture Notes Transport Phenomena CHEP 211oskidtynash7Оценок пока нет
- Viscoelasticity - WikipediaДокумент43 страницыViscoelasticity - WikipediaEsraa AhmedОценок пока нет
- ME108 Lab5Документ8 страницME108 Lab5Nick Renda100% (1)
- Time-Temperature Behavior of Carbon - Epoxy Laminates PDFДокумент15 страницTime-Temperature Behavior of Carbon - Epoxy Laminates PDFShabi HadashОценок пока нет
- Material Science Lab 1Документ35 страницMaterial Science Lab 1Dokania AnishОценок пока нет
- Chemical Kinetics: Collision Theory of Reaction Rate: Emmanuel NtambiДокумент21 страницаChemical Kinetics: Collision Theory of Reaction Rate: Emmanuel NtambiMoses Umaru MwesigwaОценок пока нет
- Navier Stokes Equations For CFDДокумент31 страницаNavier Stokes Equations For CFDPFFОценок пока нет
- Deformation of Noncrystalline MaterialsДокумент25 страницDeformation of Noncrystalline Materialscynthialeo94Оценок пока нет
- Strain-Hardening of MetalsДокумент27 страницStrain-Hardening of MetalsAsadUllahОценок пока нет
- Engineering Materials MEE 110: Dr. M. Tauqeer AnwarДокумент12 страницEngineering Materials MEE 110: Dr. M. Tauqeer AnwarAli HassanОценок пока нет
- Strength of Materials - I: Chapter - IVДокумент32 страницыStrength of Materials - I: Chapter - IV1030117753Оценок пока нет
- Prof. Dr. A. Achterberg, Astronomical Dept., IMAPP, Radboud UniversiteitДокумент37 страницProf. Dr. A. Achterberg, Astronomical Dept., IMAPP, Radboud UniversiteitEnrique FloresОценок пока нет
- ME 305 Fluid Mechanics IДокумент26 страницME 305 Fluid Mechanics IEsin KahramanОценок пока нет
- Exp-1 Tension Test PDFДокумент8 страницExp-1 Tension Test PDFHanamant HunashikattiОценок пока нет
- Creep ViscoelastДокумент12 страницCreep Viscoelastlrodriguez_892566Оценок пока нет
- RRKM TheoryДокумент39 страницRRKM Theoryfarooq_bagban100% (1)
- Chap02 - 2 - Nonlinear Equs - Newton - SecantДокумент47 страницChap02 - 2 - Nonlinear Equs - Newton - SecantaliОценок пока нет
- Chapter 4Документ43 страницыChapter 4aliОценок пока нет
- Chap02 - 3 - Mult-Roots and Systems of EquationsДокумент18 страницChap02 - 3 - Mult-Roots and Systems of EquationsaliОценок пока нет
- Chap02 - 1 - Nonlinear Equs - BisectionFalse-PositionДокумент35 страницChap02 - 1 - Nonlinear Equs - BisectionFalse-PositionaliОценок пока нет
- R4 PDFДокумент30 страницR4 PDFaliОценок пока нет
- Spring15 M2108 Test2 SolnДокумент3 страницыSpring15 M2108 Test2 SolnaliОценок пока нет
- Polymer Plymerisation IonДокумент18 страницPolymer Plymerisation IonFlorendawardОценок пока нет
- R2 PDFДокумент16 страницR2 PDFaliОценок пока нет
- R3 PDFДокумент13 страницR3 PDFaliОценок пока нет
- R1 PDFДокумент15 страницR1 PDFaliОценок пока нет
- Lecture 2Документ14 страницLecture 2aliОценок пока нет
- RGA AnalysisДокумент32 страницыRGA AnalysisaliОценок пока нет
- Lecture 1 PDFДокумент34 страницыLecture 1 PDFaliОценок пока нет
- Chemical Process Control Lab Open-Loop Dynamics of Three Stirred Tanks in SeriesДокумент3 страницыChemical Process Control Lab Open-Loop Dynamics of Three Stirred Tanks in Seriesali0% (1)
- Dental CeramicsДокумент434 страницыDental Ceramicskirtiabhi100% (2)
- PDF No Bake Asweseeit - CompressДокумент132 страницыPDF No Bake Asweseeit - CompresssimphiweОценок пока нет
- Structure Property Relationships For Polyether-Based ElectrolyteДокумент9 страницStructure Property Relationships For Polyether-Based ElectrolyteYu WangОценок пока нет
- Adb Acp 1000Документ2 страницыAdb Acp 1000vietpuntocomОценок пока нет
- Aquifers of Dera Ghazi KhanДокумент12 страницAquifers of Dera Ghazi KhanArslan geoscientistОценок пока нет
- Tream Paper 2.8.editedДокумент5 страницTream Paper 2.8.editedPartho BasakОценок пока нет
- Delmars Standard Textbook of Electricity 6th Edition Herman Test BankДокумент6 страницDelmars Standard Textbook of Electricity 6th Edition Herman Test Bankphelandieuz7n100% (27)
- Chapter 8 Design For Injection MoldingДокумент94 страницыChapter 8 Design For Injection Moldingxuân quân lêОценок пока нет
- The Making Shaping and Treating of SteelДокумент198 страницThe Making Shaping and Treating of SteelJitendra SoniОценок пока нет
- 2012 Chem E Car Job Safety Form For IHLДокумент13 страниц2012 Chem E Car Job Safety Form For IHLrofiqq4Оценок пока нет
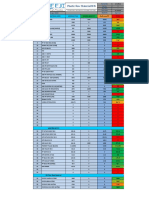
- Plastic Raw Material MIS: Date 18-Apr-2022Документ3 страницыPlastic Raw Material MIS: Date 18-Apr-2022Office atozОценок пока нет
- Bituminous (Asphalt) Road: A Summer Training ReportДокумент15 страницBituminous (Asphalt) Road: A Summer Training ReportAkhilanand Gaurav100% (1)
- Carboguard 890 PDSДокумент2 страницыCarboguard 890 PDSsalamrefighОценок пока нет
- Casing Integrity TestingДокумент1 страницаCasing Integrity TestingKim MissonОценок пока нет
- Reodata41 PDFДокумент68 страницReodata41 PDFMunzuara AktherОценок пока нет
- Heat and Mass Transfer of Single Droplet Particle DryingДокумент9 страницHeat and Mass Transfer of Single Droplet Particle DryingLiliam Teresita Manrique DelgadoОценок пока нет
- Test Certificate: Counto Microfine Products Private LimitedДокумент1 страницаTest Certificate: Counto Microfine Products Private LimitedSiddhesh Kamat MhamaiОценок пока нет
- BibliographiesДокумент2 страницыBibliographiesVa LicОценок пока нет
- Applied Catalysis B: EnvironmentalДокумент14 страницApplied Catalysis B: EnvironmentalAnonymous 2g4jKo5a7vОценок пока нет
- 7m.span SlabДокумент15 страниц7m.span SlabEngineeri TadiyosОценок пока нет
- Isoreactive Red He3bДокумент3 страницыIsoreactive Red He3bscribd_user2010Оценок пока нет
- Steel Grades According To Japanese Standards: Mechanical PropertiesДокумент2 страницыSteel Grades According To Japanese Standards: Mechanical PropertiesGANESHОценок пока нет
- Aluminium Boat BuildingДокумент6 страницAluminium Boat Buildingjohnknight000Оценок пока нет
- Waste Minimization and ManagementДокумент32 страницыWaste Minimization and ManagementNur AishaОценок пока нет
- Stainless Steel Tube Stock DataДокумент18 страницStainless Steel Tube Stock DataFU SHING STAINLESS STEEL CO.Оценок пока нет
- Chemistry Module Form 4 Complete SetДокумент197 страницChemistry Module Form 4 Complete SetDawana Nasuha100% (2)
- MgFeO4@UiO 66 NH2Документ10 страницMgFeO4@UiO 66 NH2Vương NgОценок пока нет
- Chemlube 215 229 230 501 751 822Документ2 страницыChemlube 215 229 230 501 751 822Suprastowo Bin SarinoОценок пока нет
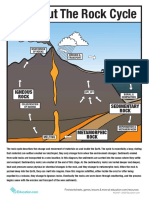
- Rock Cycle QuizДокумент2 страницыRock Cycle QuizKizzi Kye Edelweiss BalmoresОценок пока нет