Вам также может понравиться
- Communication Interface: SD20 Series Digital IndicatorДокумент28 страницCommunication Interface: SD20 Series Digital IndicatorChristianОценок пока нет
- RS232 CommunicationsДокумент37 страницRS232 CommunicationsNoor Kareem100% (1)
- Vc34 Kompend Kap084 eДокумент60 страницVc34 Kompend Kap084 eSafetyjoe2Оценок пока нет
- Dokumen - Tips - Protocol Description Iec 60870 5 101Документ18 страницDokumen - Tips - Protocol Description Iec 60870 5 101alextivanОценок пока нет
- PCF8582C-2: 1. DescriptionДокумент21 страницаPCF8582C-2: 1. DescriptionroozbehxoxОценок пока нет
- Serial Port InterfacingДокумент5 страницSerial Port Interfacingyampire100% (1)
- 8251 & 8253 Programmable Communication Interface &programmable Interval TimerДокумент47 страниц8251 & 8253 Programmable Communication Interface &programmable Interval Timersree2728Оценок пока нет
- Protocol Converter Profibus DP for UPS and InverterДокумент9 страницProtocol Converter Profibus DP for UPS and Inverteribs434Оценок пока нет
- 10 Mbps ARCNET (ANSI 878.1) Controller With 2Kx8 On-Board RAMДокумент89 страниц10 Mbps ARCNET (ANSI 878.1) Controller With 2Kx8 On-Board RAMGoh Seng TakОценок пока нет
- TD0208100IДокумент4 страницыTD0208100IOmar AzzainОценок пока нет
- EDN Design Ideas 1998Документ166 страницEDN Design Ideas 1998chag1956100% (4)
- I2C Interfacing To XC3S400 FPGAДокумент14 страницI2C Interfacing To XC3S400 FPGAMahesh BhatkalОценок пока нет
- Opt C2Документ42 страницыOpt C2abdelali chakirОценок пока нет
- ADPC-101 - Manual Analog To Digital ConverterДокумент30 страницADPC-101 - Manual Analog To Digital ConverterKeziah SusannaPrinceОценок пока нет
- Mpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Документ6 страницMpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Andrzej GomulaОценок пока нет
- M3LCR ManualДокумент12 страницM3LCR ManualNovinistanbul TurkluОценок пока нет
- YS-C20L ManualДокумент3 страницыYS-C20L ManualminhaaaОценок пока нет
- AN-739 rs232 Cop800Документ12 страницAN-739 rs232 Cop800api-3725139Оценок пока нет
- Installation Guide for 16-Input Delta ControllerДокумент10 страницInstallation Guide for 16-Input Delta ControllerAdolfo Riquelme NovoaОценок пока нет
- Chapter 4: Communicating with PLCsДокумент44 страницыChapter 4: Communicating with PLCsmaninderpreetОценок пока нет
- LD 24 Radar Manual 0927Документ15 страницLD 24 Radar Manual 0927Majuna KonggrapuntОценок пока нет
- Manual of EX-9132Документ40 страницManual of EX-9132Magicomputo MgОценок пока нет
- JZ862 User ManualДокумент6 страницJZ862 User ManualEhab IsmailОценок пока нет
- DIAGRAMA Conversor R232 422Документ5 страницDIAGRAMA Conversor R232 422Gregg JamesОценок пока нет
- 31-302 Eng Ds Pcd3m6560-ProfibusДокумент2 страницы31-302 Eng Ds Pcd3m6560-ProfibusZé CerqueiraОценок пока нет
- Procontrol p13/42Документ61 страницаProcontrol p13/42Liji Brijesh100% (1)
- Intelligent Water Control System Using 8051 (AT89C51) : Project ReportДокумент12 страницIntelligent Water Control System Using 8051 (AT89C51) : Project ReportNadeem AnjumОценок пока нет
- Operation Instruction For Communicatio Card PN000TXWXДокумент14 страницOperation Instruction For Communicatio Card PN000TXWXrameshSe7enОценок пока нет
- Multicast Serial HDLC To Ip Converter SCRAST-18: Functional SpecificationДокумент2 страницыMulticast Serial HDLC To Ip Converter SCRAST-18: Functional SpecificationYoucef Khakhe100% (3)
- Digital Compass Solution HMC6352: Features BenefitsДокумент13 страницDigital Compass Solution HMC6352: Features BenefitsCarlos Alberto Espindola SilvaОценок пока нет
- Bacnet/Modbus Carrier Translator: Product DataДокумент1 страницаBacnet/Modbus Carrier Translator: Product DataTTIBCCAОценок пока нет
- Modbus Carrier TranslatorДокумент1 страницаModbus Carrier TranslatorNaiduОценок пока нет
- RS-232C:TELNET Protocol SpecificationsДокумент54 страницыRS-232C:TELNET Protocol SpecificationsJVTO79Оценок пока нет
- Modbus Interface RISH M01 InfoДокумент18 страницModbus Interface RISH M01 InfoMustafa HasanОценок пока нет
- C3-100 Installation GuideДокумент2 страницыC3-100 Installation GuidejessvelazquezОценок пока нет
- Circuit Diagram Wireless TransmitterДокумент17 страницCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- NOJA-520-03 SCADA Interface DescriptionДокумент21 страницаNOJA-520-03 SCADA Interface DescriptionAlejandro MelgarejoОценок пока нет
- TASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsДокумент28 страницTASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsChhim AnasОценок пока нет
- EL6021 Serial Interface RS422/RS485Документ2 страницыEL6021 Serial Interface RS422/RS485nilton.flavioОценок пока нет
- Hatteland Display Technical ManualДокумент26 страницHatteland Display Technical Manualrohit sonawaneОценок пока нет
- Data Sheet: 2048 8-Bit CMOS EEPROM With I C-Bus InterfaceДокумент21 страницаData Sheet: 2048 8-Bit CMOS EEPROM With I C-Bus InterfacejuniormalitОценок пока нет
- Technical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aДокумент22 страницыTechnical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aJon CornishОценок пока нет
- Manual - MITEC Serial ProtocolДокумент15 страницManual - MITEC Serial ProtocolAmar AlgerОценок пока нет
- VSCA Serial Communications BoardДокумент10 страницVSCA Serial Communications BoardRedaMedОценок пока нет
- MAC10 Communication ManualДокумент27 страницMAC10 Communication ManualĐức ĐàmОценок пока нет
- Idm-6830 and Idm-7842dag (C)Документ22 страницыIdm-6830 and Idm-7842dag (C)BOsy Ying LoОценок пока нет
- Interface Rs485Документ13 страницInterface Rs485jol1386100% (1)
- Datasheet SDP600series Differential Pressure SensorДокумент9 страницDatasheet SDP600series Differential Pressure SensorRahul Albuquerque100% (1)
- Relay For OLTC Control & Transformer Monitoring: Technical DataДокумент36 страницRelay For OLTC Control & Transformer Monitoring: Technical DataHuy Truong GiaОценок пока нет
- PN532C1Документ25 страницPN532C1Subashini de SilvaОценок пока нет
- 420 Key EncoderДокумент22 страницы420 Key EncoderDilip KumarОценок пока нет
- Serial Communication Protocols GuideДокумент32 страницыSerial Communication Protocols GuideVissu Sweet100% (1)
- R6510C - IEC 870 Interface GuideДокумент12 страницR6510C - IEC 870 Interface GuideBehzadОценок пока нет
- FH CP12438IRC-IECinteroperability 76Документ14 страницFH CP12438IRC-IECinteroperability 76kosicenetflixОценок пока нет
- Manual PLC Click ModbusДокумент44 страницыManual PLC Click ModbusDavid Mtz ZuritaОценок пока нет
- Click PLC CommunicationДокумент40 страницClick PLC Communicationobinnabenedict100% (1)
- How To Implement DSP Algorithms Using The Xilinx Spartan 3E Starter BoardДокумент7 страницHow To Implement DSP Algorithms Using The Xilinx Spartan 3E Starter BoardShahzad SaleemОценок пока нет
- ATC-108 User's ManualДокумент0 страницATC-108 User's ManualMaitry ShahОценок пока нет
- High-Performance D/A-Converters: Application to Digital TransceiversОт EverandHigh-Performance D/A-Converters: Application to Digital TransceiversОценок пока нет
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.От EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Оценок пока нет
- Multimedia OPC Alarm Management Software: Visualize Your EnterpriseДокумент2 страницыMultimedia OPC Alarm Management Software: Visualize Your Enterpriseyana sopian hidayatОценок пока нет
- Serial Interface RS485 (RS422) Configuration InstructionsДокумент20 страницSerial Interface RS485 (RS422) Configuration Instructionsyana sopian hidayatОценок пока нет
- Vibration and Temperature Monitoring Solutions PDFДокумент34 страницыVibration and Temperature Monitoring Solutions PDFyana sopian hidayatОценок пока нет
- Sure Cross QM30VT1 Vibration and Temperature Sensor: DatasheetДокумент7 страницSure Cross QM30VT1 Vibration and Temperature Sensor: Datasheetyana sopian hidayatОценок пока нет
- Vibration and Temperature Monitoring Solutions PDFДокумент34 страницыVibration and Temperature Monitoring Solutions PDFyana sopian hidayatОценок пока нет
- Sure Cross QM30VT1 Vibration and Temperature Sensor: DatasheetДокумент7 страницSure Cross QM30VT1 Vibration and Temperature Sensor: Datasheetyana sopian hidayatОценок пока нет
- Anybus Modbus-TCP/RTU Gateway: User ManualДокумент22 страницыAnybus Modbus-TCP/RTU Gateway: User Manualyana sopian hidayatОценок пока нет
- Anybus Wireless Bridge Ethernet To WLAN: User ManualДокумент32 страницыAnybus Wireless Bridge Ethernet To WLAN: User Manualyana sopian hidayatОценок пока нет
- Anybus Wireless Bridge Ethernet To WLAN: User ManualДокумент32 страницыAnybus Wireless Bridge Ethernet To WLAN: User Manualyana sopian hidayatОценок пока нет
- Sp1668-Ab7702 3 1Документ2 страницыSp1668-Ab7702 3 1Anonymous zQu7SBОценок пока нет
- Quick Setup Guide Anybus Wireless Bridge - Ethernet To Wlan (Dual Band, 2.4 GHZ & 5 GHZ)Документ5 страницQuick Setup Guide Anybus Wireless Bridge - Ethernet To Wlan (Dual Band, 2.4 GHZ & 5 GHZ)yana sopian hidayatОценок пока нет
- Sinamics S120 Getting Started With The Starter Commissioning ToolДокумент92 страницыSinamics S120 Getting Started With The Starter Commissioning Toolwww.otomasyonegitimi.comОценок пока нет
- Upgrade Software GX DeveloperДокумент26 страницUpgrade Software GX Developeryana sopian hidayatОценок пока нет
- LCS (eRAN3.0 - 04)Документ39 страницLCS (eRAN3.0 - 04)AlexОценок пока нет
- 003 - Datalogger - Lsflow PDFДокумент3 страницы003 - Datalogger - Lsflow PDFDavinder Singh BhattiОценок пока нет
- MDD1902 PDFДокумент6 страницMDD1902 PDFAmc Forklift ElektrikОценок пока нет
- Physic Presentation (Radio Waves)Документ17 страницPhysic Presentation (Radio Waves)Az MY100% (1)
- Lab No 4 - ReportДокумент18 страницLab No 4 - ReportZainab Ali Naveed IrshadОценок пока нет
- DC Component: What Is Fault in Power System?Документ8 страницDC Component: What Is Fault in Power System?Vasudevan KunjithapathamОценок пока нет
- 01-02 Principle of FTTH Data PlanДокумент16 страниц01-02 Principle of FTTH Data PlanMinОценок пока нет
- TimeEdit M-IRELE 1 Master en Ing Nieur Civil Lectricien Finalit SP Cialis e Lectron... 2024-02-06 14 30Документ15 страницTimeEdit M-IRELE 1 Master en Ing Nieur Civil Lectricien Finalit SP Cialis e Lectron... 2024-02-06 14 30hung kungОценок пока нет
- SwissQual Measurements Reported in TEMS Discovery Device 12.0.0 PDFДокумент53 страницыSwissQual Measurements Reported in TEMS Discovery Device 12.0.0 PDFnaeem05Оценок пока нет
- Network Check ACS880-04-585A-3: Network and Transformer Data Supply Unit DataДокумент2 страницыNetwork Check ACS880-04-585A-3: Network and Transformer Data Supply Unit DataKrishna JashaОценок пока нет
- Honeywell S7830 SpecДокумент16 страницHoneywell S7830 SpecAndres ParedesОценок пока нет
- 7SR191 - Technical Manual R2e-1aДокумент417 страниц7SR191 - Technical Manual R2e-1aAhmed HussainОценок пока нет
- Projector Spec: TechnologyДокумент2 страницыProjector Spec: TechnologyTathokoza MpondaОценок пока нет
- Dielectric Absorption 3Документ13 страницDielectric Absorption 3pappo1234Оценок пока нет
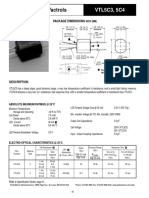
- Low Cost Axial Vactrols: VTL5C3, 5C4Документ2 страницыLow Cost Axial Vactrols: VTL5C3, 5C4sillyОценок пока нет
- B156XW02 V0Документ36 страницB156XW02 V0Alexandre MastelliniОценок пока нет
- Cadence Innovus: Innovation Continues : Peter Pan, Product Manager, Cadence Arm Tech Symposia - Beijing October 2018Документ26 страницCadence Innovus: Innovation Continues : Peter Pan, Product Manager, Cadence Arm Tech Symposia - Beijing October 2018Dileep GangavaramОценок пока нет
- GSM SIM & SecurityДокумент31 страницаGSM SIM & SecuritymanthasaikarthikОценок пока нет
- THE 8051 MICROCONTROLLERДокумент49 страницTHE 8051 MICROCONTROLLERSabuj Ahmed100% (1)
- S28 PDFДокумент109 страницS28 PDFSonu Alam100% (1)
- Wifi Printer Setting GuideДокумент3 страницыWifi Printer Setting GuideChris Le TsarОценок пока нет
- Bior502-M Fingerprint Smart Card Reader: SpecificationДокумент1 страницаBior502-M Fingerprint Smart Card Reader: SpecificationadelinОценок пока нет
- Module 1Документ209 страницModule 1Athulya M ArunОценок пока нет
- Nokia ReportsДокумент2 страницыNokia Reportsnarendraiit2003100% (3)
- Principles of Scalable Performance: CSE539: Advanced Computer ArchitectureДокумент7 страницPrinciples of Scalable Performance: CSE539: Advanced Computer ArchitectureShilpa ShridharОценок пока нет
- Analog Electronics - EC-EE-IN Combine - Done IITKДокумент36 страницAnalog Electronics - EC-EE-IN Combine - Done IITKSatyam TecОценок пока нет
- CIV 521 EngДокумент26 страницCIV 521 EnghowlakОценок пока нет
- Digital VoltmeterДокумент3 страницыDigital VoltmeterjayОценок пока нет
- Calculating RTU TransmissionДокумент2 страницыCalculating RTU Transmissionceleritas81Оценок пока нет
- Acer Aspire 5735 Intel Wistron Cathedral Peak II PDFДокумент44 страницыAcer Aspire 5735 Intel Wistron Cathedral Peak II PDFthorito23Оценок пока нет