Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- EMC of ICs Masters STU 2009Документ105 страницEMC of ICs Masters STU 2009Lily BabouОценок пока нет
- Permanent Magnet DC Criteria: Motors Design and Operation AdvantagesДокумент7 страницPermanent Magnet DC Criteria: Motors Design and Operation Advantagesdjole07Оценок пока нет
- Brushless Air GapДокумент9 страницBrushless Air Gapdjole07Оценок пока нет
- Epfl TH3221Документ221 страницаEpfl TH3221djole07Оценок пока нет
- BL DC Without PMДокумент15 страницBL DC Without PMsamponОценок пока нет
- Ad Notam Display Frame Unit: Product HighlightsДокумент5 страницAd Notam Display Frame Unit: Product HighlightsVishal SuryawaniОценок пока нет
- DSE335 Operators ManualДокумент90 страницDSE335 Operators ManualcarlosrmtzОценок пока нет
- Machine SolutionДокумент337 страницMachine SolutionSumon SarkerОценок пока нет
- Eee111 Experiment 4Документ6 страницEee111 Experiment 4Amirul 0205Оценок пока нет
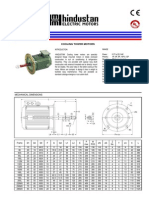
- Cooling Tower MotorДокумент2 страницыCooling Tower MotorDipendraTomarОценок пока нет
- CV Qazim PDFДокумент1 страницаCV Qazim PDFUtkarsh Anand CSEОценок пока нет
- Checklist AsetДокумент8 страницChecklist AsetcheanhoiОценок пока нет
- Base Paper TamДокумент17 страницBase Paper TamJoseph JohnОценок пока нет
- Supply Chain IntegrationДокумент9 страницSupply Chain IntegrationJohn SujithОценок пока нет
- CV-Agus Nugraha (11.01.2021)Документ11 страницCV-Agus Nugraha (11.01.2021)Agus NugrahaОценок пока нет
- Extreme Switching Lab Guide v1.8 (Ebook)Документ95 страницExtreme Switching Lab Guide v1.8 (Ebook)Hrvoje SilovОценок пока нет
- COTO To SendДокумент37 страницCOTO To SendHemant Singh JadaunОценок пока нет
- The A - Z Guide of PythonДокумент11 страницThe A - Z Guide of PythonSakshi JainОценок пока нет
- Computer Education ModuleДокумент22 страницыComputer Education ModuleJulia Melissa CzapОценок пока нет
- From The President's Desk: in This IssueДокумент6 страницFrom The President's Desk: in This IssueJayant ShaligramОценок пока нет
- 2023-6-23-Minutes of Monthly Coordination Meeting - 06 (PIU, PIC & KRJV) DraftДокумент7 страниц2023-6-23-Minutes of Monthly Coordination Meeting - 06 (PIU, PIC & KRJV) DraftSivamurugan SivanayagamОценок пока нет
- Event Specification GuideДокумент2 страницыEvent Specification GuideMarie Toni FondevillaОценок пока нет
- Aircraft Landing Gear Design ProjectДокумент20 страницAircraft Landing Gear Design Projectchristo.t.josephОценок пока нет
- CNC Programming & Application: Federal TVET Institute Manufacturing Technology Department Addis Abeba EthiopiaДокумент58 страницCNC Programming & Application: Federal TVET Institute Manufacturing Technology Department Addis Abeba EthiopiaGezae MebrahtuОценок пока нет
- Geoscience Data Management ReportДокумент18 страницGeoscience Data Management ReportSantiagoCuartasОценок пока нет
- M340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionДокумент9 страницM340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionJose MarcialОценок пока нет
- Project Report: Online BankingДокумент38 страницProject Report: Online BankingRoshan ShawОценок пока нет
- FlucsPro Ver 6 - 0 Web Training Notes Rev1Документ32 страницыFlucsPro Ver 6 - 0 Web Training Notes Rev1dharshan balajiОценок пока нет
- CourseSyllabus Bki114-IHCI-2016 v11Документ5 страницCourseSyllabus Bki114-IHCI-2016 v11Erno LedderОценок пока нет
- Documenting Software Architectures: Views and Beyond: June 2002Документ3 страницыDocumenting Software Architectures: Views and Beyond: June 2002Ioan AdascaliteiОценок пока нет
- Airport Qualification and Familiarization ChartsДокумент3 страницыAirport Qualification and Familiarization Chartsjackygdp645Оценок пока нет
- Netscreen Concepts and ExamplesДокумент476 страницNetscreen Concepts and ExamplesKeshri SekhonОценок пока нет
- Datasheet - HK S29al016j70tfi020 6599589Документ58 страницDatasheet - HK S29al016j70tfi020 6599589SAABОценок пока нет
- Switch 3COM 2952Документ4 страницыSwitch 3COM 2952Fabio de OliveiraОценок пока нет