Вам также может понравиться
- Differential and Multistage Amplifiers: ECE 3120 Microelectronics II Dr. Suketu NaikДокумент47 страницDifferential and Multistage Amplifiers: ECE 3120 Microelectronics II Dr. Suketu NaikSwathi BellaryОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Thong So Linh KienДокумент300 страницThong So Linh Kienwallhisg100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Digital Integrated Circuits: A Design PerspectiveДокумент15 страницDigital Integrated Circuits: A Design PerspectiveIan PressОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Nanoscale Transistors: Device Physics, Modeling and SimulationДокумент27 страницNanoscale Transistors: Device Physics, Modeling and SimulationTahirAbbasОценок пока нет
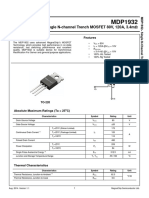
- MDP1932 MagnaChipДокумент6 страницMDP1932 MagnaChipVanderMucioОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Matel Homework Caesaria Ayu 1506717323Документ8 страницMatel Homework Caesaria Ayu 1506717323Caesaria AyuОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- PDF Pantallas-2 PDFДокумент78 страницPDF Pantallas-2 PDFDiego Correa100% (3)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Principles of Semiconductor Devices-Lecture38Документ29 страницPrinciples of Semiconductor Devices-Lecture38LIAKMANОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- International Rectifier: Hexfet® Power MosfetsДокумент34 страницыInternational Rectifier: Hexfet® Power MosfetsCO6NMPОценок пока нет
- A Review of Front End AC-DC Topologies in Universal Battery Charger For Electric TransportationДокумент6 страницA Review of Front End AC-DC Topologies in Universal Battery Charger For Electric TransportationShayan AhmedОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Mtech VLSI SyllabusДокумент37 страницMtech VLSI SyllabusRavindra vs100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- SSED Solved Problems For Chapter 6Документ5 страницSSED Solved Problems For Chapter 6MINH NGUYỄN THẾ100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Maby SSEC b00k PDFДокумент922 страницыMaby SSEC b00k PDFFatima Sowar EldahabОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Atlas98-V1 Users PDFДокумент318 страницAtlas98-V1 Users PDFLOKESH SHARMAОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Scaling of MosfetДокумент40 страницScaling of MosfetSaumitra TripathiОценок пока нет
- Hobby Electronics 1978 11 S OCR Vol 1 No 1Документ74 страницыHobby Electronics 1978 11 S OCR Vol 1 No 1Annamária ApátiОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Account, Tool Setup and Study of The Basic I-V Equation of The MOS TransistorДокумент16 страницAccount, Tool Setup and Study of The Basic I-V Equation of The MOS TransistorEsakkiPonniahОценок пока нет
- OZ523-9995 Inverters PDFДокумент31 страницаOZ523-9995 Inverters PDFtesaurusОценок пока нет
- Understanding Power MOSFET Data Sheet ParametersДокумент28 страницUnderstanding Power MOSFET Data Sheet Parametersgui9871Оценок пока нет
- CMOS Fabrication ProcessДокумент10 страницCMOS Fabrication ProcessJohnMatthewBancilОценок пока нет
- Ebook PDF Cmos Circuit Design Layout and Simulation Ieee Press Series On Microelectronic Systems 4th Edition PDFДокумент42 страницыEbook PDF Cmos Circuit Design Layout and Simulation Ieee Press Series On Microelectronic Systems 4th Edition PDFrobert.dumas706100% (37)
- DIY Op Amp (By Nelson Pass)Документ11 страницDIY Op Amp (By Nelson Pass)MechDR100% (1)
- Infineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnДокумент15 страницInfineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnMR. VAIBHAVSINGH VARMAОценок пока нет
- Advanced Power Electronics Corp.: DescriptionДокумент5 страницAdvanced Power Electronics Corp.: DescriptionSergio Daniel CaminoОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- GM by Id MethodologyДокумент25 страницGM by Id Methodologynikeme189Оценок пока нет
- EDC Model PapersДокумент12 страницEDC Model PapersanithaОценок пока нет
- SC DIY CDI Article HiresДокумент8 страницSC DIY CDI Article HiresGogot YuliyantoОценок пока нет
- 4-String, Max 400mA/String, 80V Return, Step-Up, WLED ControllerДокумент17 страниц4-String, Max 400mA/String, 80V Return, Step-Up, WLED ControllerLucía MitchellОценок пока нет
- Ec1 QF1Документ3 страницыEc1 QF1stella maryОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 05961633Документ9 страниц05961633dabalejoОценок пока нет