Академический Документы
Профессиональный Документы
Культура Документы
EE6603-SCAD-MSM - by WWW - LearnEngineering.in PDF
Загружено:
Dhivya BОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
EE6603-SCAD-MSM - by WWW - LearnEngineering.in PDF
Загружено:
Dhivya BАвторское право:
Доступные форматы
Visit & Downloaded From : www.LearnEngineering.
in
ENGINEERING COLLEGES
2016 – 17 Even Semester
COMMON MINIMUM STUDY MATERIAL (MSM)
Department of Electrical and Electronics Engineering
SUBJECT CODE: EE 6603
n
SUBJECT NAME: Power System Operation and Control
g.i
Regulation: 2013 Year and Semester:III/VI
Prepared by
rin
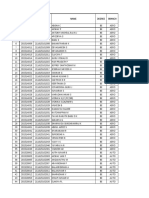
Sl. No. Name of the Faculty Designation Affiliating College
1. T.Ramachandran AP SCAD CET
2 K.Narayanan
ee
AP SCAD CET
gin
3. J.Daniel sathyaraj AP FXEC
4. Banumathy AP FXEC
En
5. A.Cordelia Sumathy AP SMTEC
Verified by DLI, CLI and Approved by the Centralized Monitoring Team dated
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
ANNA UNIVERSITY CHENNAI-25
SYLLABUS COPY
REGULATION 2013
EE 6603 POWER SYSTEM OPERATION AND CONTROL LTPC
3 0 0 3 OBJECTIVES:
• To have an overview of power system operation and control.
• To model power-frequency dynamics and to design power-frequency controller.
• To model reactive power-voltage interaction and the control actions to be implemented for
maintaining the voltage profile against varying system load.
• To study the economic operation of power system.
• To teach about SCADA and its application for real time operation and control of power systems.
UNIT I INTRODUCTION 9
An overview of power system operation and control - system load variation - load characteristics - load curves and
n
load-duration curve - load factor - diversity factor - Importance of load forecasting and quadratic and exponential curve
fitting techniques of forecasting – plant level and system level controls .
g.i
UNIT II REAL POWER - FREQUENCY CONTROL 9
Basics of speed governing mechanism and modeling - speed-load characteristics – load sharing
between two synchronous machines in parallel - control area concept - LFC control of a single-area system - static and
rin
dynamic analysis of uncontrolled and controlled cases - two-area system – modeling - static analysis of uncontrolled
case - tie line with frequency bias control - state variable model - integration of economic dispatch control with LFC.
UNIT III REACTIVE POWER–VOLTAGE CONTROL 9
Generation and absorption of reactive power - basics of reactive power control - excitation systems –modeling - static
ee
and dynamic analysis - stability compensation - methods of voltage control: tapchanging transformer, SVC (TCR +
TSC) and STATCOM – secondary voltage control.
UNIT IV UNIT COMMITMENT AND ECONOMIC DISPATCH 9
gin
Formulation of economic dispatch problem – I/O cost characterization – incremental cost curve – coordination
equations without and with loss (No derivation of loss coefficients) - solution by direct method and λ-iteration method
- statement of unit commitment problem – priority-list method – forward dynamic programming.
UNIT V COMPUTER CONTROL OF POWER SYSTEMS 9
En
Need for computer control of power systems - concept of energy control centre - functions – system monitoring - data
acquisition and control - system hardware configuration – SCADA and EMS functions - network topology - state
estimation – WLSE - Contingency Analysis - state transition diagram showing various state transitions and control
strategies.
arn
TOTAL : 45 PERIODS
OUTCOMES:
Ability to understand and analyze power system operation, stability, control and protection.
TEXT BOOKS:
Le
1. Olle.I.Elgerd, ‘Electric Energy Systems theory - An introduction’, Tata McGraw Hill Education Pvt. Ltd., New
Delhi, 34th reprint, 2010.
2. Allen. J. Wood and Bruce F. Wollenberg, ‘Power Generation, Operation and Control’, John Wiley & Sons, Inc.,
w.
2003.
3. Abhijit Chakrabarti, Sunita Halder, ‘Power System Analysis Operation and Control’, PHI learning Pvt. Ltd., New
Delhi, Third Edition, 2010.
ww
REFERENCES:
1. Nagrath I.J. and Kothari D.P., ‘Modern Power System Analysis’, Tata McGraw-Hill, Fourth Edition,2011.
2. Kundur P., ‘Power System Stability and Control, Tata McGraw Hill Education Pvt. Ltd., New Delhi, 10th reprint,
2010.
3. Hadi Saadat, ‘Power System Analysis’, Tata McGraw Hill Education Pvt. Ltd., New Delhi, 21st reprint, 2010.
4. N.V.Ramana, “Power System Operation and Control,” Pearson, 2011.
5. C.A.Gross, “Power System Analysis,” Wiley India, 2011.
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
EE 6603 POWER SYSTEM OPERATION AND CONTROL LTPC
3003
1. Aim and Objective of the Subject
Aim:
To discuss about the speed governing mechanism and how to control the voltage and study about
economic dispatch and unit commitment problem.
Objectives:
To discuss the fundamentals of Speed governing mechanism.
To make the students understand about the load forecasting.
To make the students understand about the methods of voltage control
To familiarize the students with unit commitment and economic dispatch problem
n
To make the students understand about the SCADA
g.i
2. Need and Importance for Study of the Subject
Need for Study of the Subject:
To know how the voltage and frequency is controlled
rin
To know about the unit commitment problem and economic dispatch problem
Importance for Study of the Subject:
At the end of the course, the student should be able to:
understand how to run the units with the minimum fuel cost.
ee
understand what units should be run to meet the power demand.
3. Industry Connectivity and Latest Developments
gin
Industry Connectivity:
The following companies (Industries) are connectivity to Electronic Devices: Power plants and
All substations
Latest Developments:
En
Power system stability and exciter control
Energy management system and power system security
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Department of Electrical and Electronics Engineering
Name of the Subject & Code: EE 6603 Power System Operation and Control
S.No Unit Topic No of Cumulative Book referred
hours hour
required
1. An overview of power system operation and 1 1 R1
control.
2. System load variation: System load 1 2 R1
characteristics.
3. Load curves - daily, weekly and annual. 1 3 R1
4. load-duration curve, 1 4 R1
n
UNIT I
5. load factor, diversity factor.Problems
g.i
1 5 R1
6. Importance of load forecasting 1 6 R1
rin
7. Quadratic and exponential curve fitting 1 7 R1
techniques of forecasting.
8. Plant level control 1 8 R2
9. system level control
ee 1 9 R2
gin
10. Basics of speed governing mechanism and 1 10 R1
modeling, Speed-load characteristics
11. Load sharing between two synchronous 1 11 R2
machines in parallel,Problems
En
12. Concept of control area LFC control of a 1 12 R2
single-area system
13. Static analysis of uncontrolled and controlled 1 13 R2
arn
cases
UNIT II
14. Dynamic analysis of uncontrolled and 1 14 R1
controlled cases,
15. Two-area system modeling; static analysis, 1 15 R1
Le
uncontrolled case
16. Tie line with frequency bias control of two- 1 16 R1
area system derivation
w.
17. State variable model. 1 17 R1
18. Integration of economic dispatch with LFC 1 18 R1
ww
21. Generation and Absorption of reactive power 1 19 R2
Basics of reactive power control.
22. Excitation systems – modeling. 2 21 R2
UNIT III
23. Static and Dynamic analysis 1 22 R2
24. Stability compensation 1 23 R1
25. Method of voltage control 1 24 R2
26. Tap-changing transformer 2 26 R2
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
27. SVC and STATCOM, secondary voltage 1 27 R2
control
28. Formulation of economic dispatch problem 1 28 T2
– I/O cost characterization.
29. Incremental cost curve.Problems 1 29 T2
30. Co-ordination equations and with and 1 30 T2
without loss.
UNIT IV
31. Solution by direct method and λ-iteration 2 32 T2
method. Problems
32. Statement of Unit Commitment (UC) 1 33 T2
problem
33. Priority-list methods.Problems 2 35 T2
n
g.i
34. Forward dynamic programming approach 1 36 T2
35. Need of computer control of power systems. 1 37 R1
Energy control centre: Functions
rin
36. Concept of energy control centre and the 1 38 R1
functions - system monitoring - data
acquisition and control ee
UNIT V
37. System hardware configuration – SCADA 2 40 R1
and EMS functions.
38. Network topology determination, state 1 41 R1
gin
estimation
39. WLSE- contingency analysis 2 43 R1
40. State transition diagram showing various 2 45 R1
En
state transitions and control strategies
TEXT BOOKS:
1. Olle.I.Elgerd, ‘Electric Energy Systems theory - An introduction’, Tata McGraw Hill Education Pvt. Ltd.,
arn
New Delhi, 34th reprint, 2010.
2. Allen. J. Wood and Bruce F. Wollenberg, ‘Power Generation, Operation and Control’, John Wiley & Sons,
Inc., 2003.
3. Abhijit Chakrabarti, Sunita Halder, ‘Power System Analysis Operation and Control’, PHI learning Pvt.
Le
Ltd., New Delhi, Third Edition, 2010.
REFERENCES:
1. Nagrath I.J. and Kothari D.P., ‘Modern Power System Analysis’, Tata McGraw-Hill, Fourth Edition,2011.
w.
2. Kundur P., ‘Power System Stability and Control, Tata McGraw Hill Education Pvt. Ltd., New Delhi, 10th
reprint, 2010.
3. Hadi Saadat, ‘Power System Analysis’, Tata McGraw Hill Education Pvt. Ltd., New Delhi, 21st reprint,
ww
2010.
4. N.V.Ramana, “Power System Operation and Control,” Pearson, 2011.
5. C.A.Gross, “Power System Analysis,” Wiley India, 2011.
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
INDEX
UNIT Q.NO TITLE PAGE NO
1 - 12 PART A 1
PART B
1 Important objectives of power system and various 2
control Strategies
I 2 Load forecasting 3
3 (i) Load factor (ii) Plant capacity factor (iii)Plant use 3
factor (iv)Diversity factor (v) Connected load(vi) Hot
reserve (vii) cold reserve (viii)Spinning reserve
4 Load curve and load duration curve 4
5 Problem 6-9
n
1 - 12 PART A 10
g.i
PART B
1 Speed Governing system 11
2 Modeling of single area Load Frequency control 16
rin
3 Modeling of two area system 21
II 4 Static Analysis 21
5 Dynamic Analysis 23
6 State variable model
problems
ee 27
30-34
1-12 PART A 35
gin
PART B
1 Methods of voltage control 37
III 2 Tap changing transformer 42
3 Static Var compensator 45
En
4 Relation between voltage and reactive power. 48
5 Reactive power requirement 50
6 Static and Dynamic analysis of AVR. 50
arn
1-12 PART A 54
PART B
1 Unit commitment Problem 56
2 Priority List Method 58
Le
5 Dynamic programming method 58
IV 4 Coordination equation 61
5 Problems Economic Dispatch problem 64-68
w.
1-12 PART A 69
ww
PART B
1 Security monitoring 70
V 2 Energy Management System 73
3 SCADA 74
4 Operating states 76
5 Control for secure operation 77
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Unit-1
PART-A
1. Define Plant Capacity factor. (Nov/Dec 2013)
Plant Capacity factor or plant factor is the ratio of actual energy produced to the maximum possible energy
that could have been produced based on installed plant capacity. This can also be defined as the ratio of
average demand to rated capacity and obtained directly or by multiplying plant load factor with plant
utilization factor.
2. List out the various needs for frequency regulation in power system. (Nov/Dec 2013)
In a Power System frequency needs to be maintained for supplying electricity with proper quality.
The major reasons for this are:
i. Most types of AC motors run at speeds that are directly related to the frequency.
n
ii. The Generator Turbines, particularly Steam driven ones, are designed to operate at specified
speed with limited tolerance in variation for maximum efficiency and less fatigue and wear and
g.i
tear.
iii. The overall operation of a power system can be better controlled if frequency error is kept within
strict limits.
rin
A large number of electrically operated clocks are used for power system monitoring and control.
They are all driven by synchronous motors and the accuracy of these clocks is a function of the frequency
error. ee
3. Define the term Maximum demand. (May2014)
The maximum demand of an installation or system is the greatest of all demands, which have
occurred during the specified period of time and is called daily, weekly, monthly or annual maximum
gin
demand.
4. Define load curve.
Load Curve is the graph showing the variation in the demand for energy of consumers on the supply
system with respect to time. If the graph is plotted for 24 hours it is called daily load curve; if the graph is
En
plotted for one week, one month or one year, we get weekly monthly or annual load curves respectively. The
load curve is plotted chronologically.
5. Define connected load.
arn
Each electrical device has its rated capacity, which is normally given in W, kW or MW. The sum of
the continuous ratings of all the electrical devices connected to the supply system is known as connected
load.
6. What do you mean by spinning reserve? (Nov/Dec 2010)
Le
Define spinning reserve. (Nov/Dec 2007)
Spinning reserve is the generating capacity on line (running) in excess of maximum demand and
ready to take additional load.
w.
7. What is meant by load frequency control?
Any change in load causes frequency change and generation is controlled to bring the frequency back
to the normal value. Sometimes the generation control is effected to maintain the tie-lie flow. This is called
ww
ALFC.
8. Define the term "diversity factor". (Nov/Dec 2014)
The diversity factor (FD) is the ratio of the sum of the individual maximum demands of the various groups of
consumers to the maximum demand of the whole system.
The diversity factor is greater than or equal to unity.
9. What is the need for voltage regulation in power systems?
In a Power System voltage needs to be maintained for supplying electricity with proper quality. The
major reasons for this are:
1
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
i. All equipment and appliances are designed for a certain voltage level, the rated or name plate voltage.
If voltage V of the system should deviate from that value, the performance of the device suffers and
its life expectancy drops.
ii. The real line losses depend upon the line flow which in turn depends greatly upon line end voltages.
10. What is the function of AVR loop?
The function of AVR excitation control is to regulate generator voltage and relative power output. As
th terminal voltage varies the excitation control, it maintains the terminal voltage to the required standard and
the demand of the reactive power is also met by the excitation control unit.
11.Define Load duration curve. (May 2013)
A load duration curve indicates the variation of load but with the loads arranged in descending order
of magnitude i.e the greatest load on the left and lesser loads towards right side. From this curve the load
factor of the station can be determined.
n
12.Define plant use factor .(May2014)
g.i
It is defined as the ratio of the actual energy generated during a given period to the product of capacity of
plant and the number of hours the plant has been actually operated during the period.
Plant use factor= Total KWhr generated/(Rated capacity of plant * operating hours)
rin
PART-B
1. Explain the important objectives of power system and various control Strategies during its
operation (16 M) (Nov/Dec 2012) (16M) ee
1.The Plant Level control consists of:
1. Governor Control or Prime mover control
gin
2. Automatic voltage regulator (AVR) or Excitation control
Governor Control or Prime mover control :
Governor control or Prime mover controls are concerned with speed regulation of the governor and
En
the control of energy supply system variables such as boiler pressure, temperature and flows. Speed
regulation is concerned with steam input to turbine. With variation in load, speed of governor varies as the
load is inversely proportional to speed. The speed of the generator varies and the governor senses the speed
arn
and gives a command signal, so that, the steam input of the turbine is changed relative to the load
requirement.
Automatic voltage regulator (AVR) or Excitation control:
The function of Automatic voltage regulator (AVR) excitation control is to regulate generator voltage
Le
and relative power output. As the terminal voltage varies the excitation control, it maintains the terminal
voltage to the required standard and the demand of the reactive power is also met by the excitation control
unit.
w.
2. System Level Control:
The Purpose, of system generation control is to balance the total system generation against system load
and losses, so that, the desired frequency and power interchange with neighboring systems are maintained.
ww
This comprises of:
Load frequency control (LFC)
Economic dispatch control (EDC)
System voltage control
Load frequency control (LFC)
This involves the sensing of the bus bar frequency and compares with the tie-line power frequency.
The difference of the signal is fed to the integrator and it is given to speed changer which generates the
reference speed for the governor. Thus, the frequency of tie-line is maintained as constant.
Economic dispatch control (EDC)
2
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
When the economical load distribution between a number of generator units is considered, it is found
that the optimum generation schedule is affected when an incremental increase at one of the units replaces a
compensating decrease at every other unit, in term of some incremental cost. Optimum operation of
generators at each generating station at various station load level is known as unit commitment.
System voltage control
This involves the process of controlling the system voltage within tolerable limits. This includes the
devices such as static VAR compensators, synchronous condenser, tap-changing transformer, switches,
capacitor and reactor.
The controls described above contribute to the satisfactory operaion of the power system by
maintaining system voltages, frequency, and other system variables within their acceptable limits. They also
have a profound effect on the dynamic performance of power system and on its ability to cope with
disturbances.
2.Write notes on load Forecasting. (Nov 2012) (6m)
n
The load on their systems should be estimated in advance. This estimation in advance is known as
g.i
load forecasting based on the previous experience without any historical data.
Classification of load forecasting:
Forecast Lead Time Application
rin
Real time control, real time security
Very short term Few minutes to half an hour
evaluation
Short term Half an hour to a few hours
ee Allocation of spinning reserve, unit
commitment, maintenance scheduling
gin
Planning or seasonal peak-winter,
Medium term Few days to a few weeks
summer
To plan the growth of the generation
En
Long term Few months to a few years
capacity
Need for load forecasting are:
arn
To meet out the future demand.
Long-term forecasting is required for preparing maintenance schedule of the generation units,
planning future expansion of the system.
For day-to-day operation, short term load forecasting is needed in order to commit enough generating
Le
capacity for the forecasting demand and for maintaining the required spinning reserve.
Very short term load forecasting are used for generation and distribution. (i.e.,)
Economic generation scheduling and load dispatching.
w.
Medium term load forecasting is needed for predicted monsoon acting and hydro availability and
allocating spinning reserves.
ww
3.Write notes on the following (i) Load factor (ii) Plant capacity factor (iii)Plant use factor
(iv)Diversity factor (v) Connected load(vi) Hot reserve (vii) cold reserve (viii)Spinning reserve (May
2013, Nov 2013) (16m)
1.Load factor:
The ratio of the average demand to the maximum demand is called the load factor.
Load factor = (average load)/ (maximum demand)
The load factor may be a daily load factor, a monthly load factor, or an annual load factor, if the time
period is considered in a day or a month or a year, respectively. Load factor is always less than one because
average load is smaller than the maximum demand. It plays a key role in determining the overall cost per unit
generated. Higher the load factor of the power station, lesser will be the cost per unit generated.
3
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
2.Plant capacity factor:
It is the ratio of the average demand on the station to the maximum installed capacity of the station
( )= / .
= ×
= −
3.plant-use factor:
It is defined as the ratio of the actual energy generated during a given period to the product of capacity of
plant and the number of hours the plant has been actually operated during the period.
Plant use factor= Total KWhr generated/(Rated capacity of plant * operating hours)
(iv)Diversity factor:
Diversity factor is the ratio of the sum of the maximum demands of a group of consumers to the simultaneous
maximum demand of the group of consumers.
n
Diversity factor = (sum of individual maximum demand ) / (maximum demand).
g.i
A power system supplies load to various types of consumers whose maximum demands generally do
not occur at the same time. Therefore, the maximum demand on the power system is always less than the
sum of individual maximum demands of the consumers.
rin
A high diversity factor implied that with a smaller maximum demand on the station, it is possible to
cater to the needs of several consumers with varying maximum demands occurring at different hours of the
day. The lesser the maximum demand, the lesser will be the capital investment on the generators. This helps
in reducing the overall cost of the units (kWh) generated.
ee
Thus, a higher diversity factor and a higher load factor are the desirable characteristics of the load on
a power station. The load factor can be improved by encouraging the consumers to use power during off-
gin
peak hours with certain incentives like offering a reduction in the cost of energy consumed during off-peak
hours.
Connected load
It is the sum of continuous ratings of all the equipments connected to supply systems.
En
Hot reserve
It is the reserve capacity ready for use with boiler in full steam; on synchronization of the generator it
becomes spinning reserve ready to take load.
arn
Cold reserve
It is that portion of the installed reserve capacity kept in operable condition and available for service,
but not ready for immediate loadings. It has to be brought to hot reserve state and then to spinning reserve
before loading.
Le
Spinning reserve
It is the generating capacity on line (running) in excess of maximum demand and ready to take
additional load.
w.
4.Draw the load curve and load duration curve .Explain the importance of these curves in connection with
economic operation of power system (May 2014) (16m)
ww
LOAD CURVE
A load curve is a plot of the load demand (on the y-axis) versus the time (on the x-axis) in the
chronological order. From out of the load connected, a consumer uses different fractions of the total load at
various times of the day as per his/her requirements. Since a power system has to supply load to all such
consumers, the load to be supplied varies continuously with time and does not remain constant. If the load is
measured (in units of power) at regular intervals of time, say, once in an hour (or half-an-hour) and recorded,
we can draw a curve known as the load curve.
A time period of only 24 hours is considered, and the resulting load curve, which is called a ‘Daily
load curve’, is shown in the figure. However, to predict the annual requirements of energy, the occurrence of
load at different hours and days in a year and in the power supply economics, ‘Annual load curves’ are
used.
4
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Daily Load Curve
An annual load curve is a plot of the load demand of the consumer against time in hours of the year (1 year =
8,760 hours).
n
LOAD–DURATION CURVE
g.i
The load–duration curve is a plot of the load demands (in units of power) arranged in a descending
order of magnitude (on the y-axis) and the time in hours (on the x-axis).
rin
ee
gin
En
Load Duration Curve
arn
Base Load and Peak Load
In a power system, there may be several types of generating stations such as hydro-electric stations,
fossil-fuel-fired stations, nuclear stations, and gas-turbine-driven generating stations. Of these stations, some
Le
act as base-load stations, while others act as peak load stations.
Base load: It is the unvarying load that occurs almost during the whole day on the station.
Peak load: It is the various peak demands of load over and above the base load of the station.
w.
To have a clear idea of ‘base-load’ and ‘peak load’, let us consider a power system, the daily load
curve of which is depicted in . Base-load stations run at 100% capacity on a 24-hour basis. Nuclear reactors
are ideally suited for this purpose. Intermediate or controlled-power generation stations normally are not fully
ww
loaded. Hydro-electric stations are the best choice for this purpose. Peak load stations operate during the peak
load hours only. Since the gas-turbine-driven generators can pick up the load very quickly, they are best
suited to serve as peak load stations. Where available, pumped-storage hydro-electric plants can be operated
as peak load stations. A base-load station operates at a high-load factor, whereas the peak load plant operates
at a low-load factor. So, the base-load station should have low operating costs.
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
UNIT-II – REAL POWER FREQUENCY CONTROL
PART A
1. State the advantages of state variable model.
The system dynamic model in state variables is useful in designing optimal linear regulator.
State variables are amenable for computer solutions.
State variable formulation is similar both for continuous and discrete signals.
2. What is the function of load frequency control? (Nov/Dec 2013)
The function of load frequency control on a power system is to change the control valve or gate
openings of the prime movers as a function of load variations in order to hold system individual turbines of
the system.
3. Give two conditions for proper synchronizing of alternators. (Nov/Dec 2013)
n
Condition for parallel operation
g.i
The terminal voltage of incoming alternator must be same as bus bar voltage
Frequency or speed of incoming alternator must be the same as the bus bar frequency
The phase sequence of the incoming alternator is the same as that of bus bar.
rin
4. What are the types of automatic load frequency control for interconnected power system?
Primary control ee
Secondary control
5. What is automatic load dispatching?
The generation has to meet the demand of load and frequency. Depend on the demand from the grid
gin
generation has to be controlled. At the same time, problems inside the plant may restrict the generation. The
automatic load dispatcher controls these things.
6. What is AGC?
Automatic generation control (AGC) is a system for adjusting the power output of multiple
En
generators at different power plants, in response to changes in the load. Since a power grid requires that
generation and load closely balance moment by moment, frequent adjustments to the output of generators are
necessary. The balance can be judged by measuring the system frequency; if it is increasing, more power is
arn
being generated than used, and all the machines in the system are accelerating. If the system frequency is
decreasing, more load is on the system than the instantaneous generation can provide, and all generators are
slowing down.
7. What are the conditions necessary for sharing load operating in parallel between two synchronous
Le
machines?
Local or regional power use may exceed the power of a single available generator
w.
Parallel alternator allowed one or more units to be shut down for scheduled
Emergency maintenance while the load is being supplied with power
8. State two advantages of state variable model.
ww
The system dynamic model in state variables is useful in designing optimal linear regulator.
State variables are amenable for computer solutions.
State variable formulation is similar both for continuous and discrete signals.
9. What is meant by control area? (Nov/Dec 2014)
Consider a power system with a number of generating stations and loads. It is possible to divide the
power system (say, national grid) into sub-areas (may be State Electricity Systems) in which the generators
are tightly coupled together so as to form a coherent group. All the generators respond in unison to changes
in load or speed changer settings. Such a coherent area is called a control area in which the frequency is the
same throughout in static as well as dynamic conditions.
10. What is the function of load frequency control on a power system? (May/June 2013)
10
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
The function of load frequency control on a power system becomes one of changing the control valve,
or gate openings of the prime movers, as a function of load variations in order to hold system frequency
constant.
11. Define per unit droop.
The per unit droop or speed regulation R of the generating unit is defined as the magnitude of the
change in steady state speed, expressed in p.u of rated speed, when the output of the unit gradually reduced
from 1.0p.u rated power to zero.
12. What are the assumptions made in dynamic response of uncontrolled area? (May/June 2014)
Neglect the turbine dynamics.
The speed changer action is instantaneous.
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
11
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
12
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
13
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
14
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
15
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
16
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
17
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
18
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
19
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
20
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
21
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
22
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
23
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
24
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
25
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
26
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
27
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
28
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
29
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
30
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
31
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
32
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
33
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
34
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
UNIT-III - REACTIVE POWER -VOLTAGE CONTROL
PART A
1. What are the various functions of excitation system? (Nov/Dec 2013)
Exciter is the main component in the AVR loop. It delivers D.C. power to the generator field. It must
have adequate power capacity and sufficient speed of response.
2. What are the advantages and disadvantages of synchronous compensator? (Nov/Dec 2013)
Advantages:
Reactive power production is not affected by system voltage.
Flexibility of operation at all load condition.
Smooth variation of reactive VARs as compared to step-by-step variation in static capacitors.
n
It is used in HVDC converter stations.
Disadvantages:
g.i
Installation cost is high.
It can fall out of step which may result in a large sudden change in voltage.
The machines add to the short circuit capacity of the system during fault condition.
rin
Synchronous compensators cannot be designed to work at more than about 20 kV.
3. What are the different types of reactive power compensation?
Tap-changing transformer.
ee
Booster transformer.
Regulating transformer.
gin
Static VAR Compensators
Fixed Capacitor and Thyristor Controlled Reactor
Thyristor Switched Capacitor and Thyristor Controlled Reactor
En
4. Define booster transformer. (Nov/Dec 2012)
Booster transformer is a compensating device which gives as in-phase boost similar to tap changing
transformer. o increase the voltage at an intermediate point in a line, the booster can be brought into the
circuit by the closer of relay ‘B’ and the opening of ‘A’ or vice versa.It is used in distribution feeders where
arn
the cost of tap changing transformer is not warranted.
5. What are the various methods of voltage control in transmission system?
By excitation control.
Le
By static shunt capacitors.
By static series capacitors.
By static shunt reactors.
w.
By synchronous condensers.
6. Give the functions of AVR. (May/June 2013)
ww
The basic role of the AVR is to provide constancy of the generator terminal voltage during normal,
small and slow changes in the load.
7. What is synchronous condenser?
It is a synchronous motor running at no-load and having excitation adjustable over a wide range. It
feeds positive VARs into the line under overexcited conditions and negative VARs when under excited.
Which use in sending end of transmission line.
8. Distinguish between on-load and off-load tap changing.
The off-load tap changing transformer which requires the disconnection of the transformer when
the tap setting is to be changed. Off-load tap changers are used when it is to be operated in frequently due to
load growth or some seasonal change.
35
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
The On-load tap changing transformer is used when changes in transformer ratio to be needed
frequently, and no need to switch off the transformer to change the tap of transformer. It is used on power
transformers, auto transformers and bulk distribution transformers and at other points of load service.
9. What is meant by stability compensation?
High loop gain is needed for static accuracy of Automatic Voltage Regulator (AVR), but this causes
undesirable dynamic response, possibly instability. By adding series and / or feed back stability
compensation to the AVR loop, both static accuracy and stability are improved.
10. Where are synchronous condenser installed? (May/June 2014)
A transmission line requires lagging VARs at the receiving end during peak load conditions to
prevent a voltage drop. During off-peak conditions it requires leading VARs at the receiving end to prevent a
voltage rise. Thus synchronous compensator is excellently suited for voltage regulation because it can supply
lagging as well as leading vars. Further the inertia of synchronous compensator improves system strength and
reduces the effect of sudden change in load.
n
g.i
11. Compare shunt and series capacitors.
Shunt capacitors
These are less costly.
rin
Flexibility of installation and operation.
Power factor improvement.
Efficiency of transmission and distribution of power is high.
Single or multiple banks in industrial distribution at low and medium voltage substation.
ee
Essential elements of SVC and FACTS controllers and HVDC transmission.
Reactive power compensation.
gin
They cannot be overloaded.
The reactive power supplied by static capacitors tends to decrease in case of voltage dip on the bus
because KVAr α V 2.
Series capacitors
En
To improve voltage regulation of distribution and industrial feeders.
To reduce light flicker problems.
To improve system stability.
arn
Locking of synchronous motor during starting.
R
Hunting of synchronous motor at light load due to high ratio.
X
Le
Ferro resonance occurs between transformers and series capacitors which produces harmonic over
voltages.
12. Write the relation between voltage, power and reactive power at a node.
w.
dP dQ
dV +
P Q
ww
V V
Real power
P E 2V
V R
Reactive power
Q E 2V
V X
36
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
PART B
1. Describe various methods of voltage control and explain any three in detail. (16M) (Nov/Dec 2013)
Voltage level control is accomplished by controlling the generation, absorption and reactive power flow at all
levels in the system.
The following are the methods of voltage control:
1. By excitation control.
2. By static shunt capacitors.
3. By static series capacitors.
4. By static shunt reactors.
5. By synchronous condensers.
Other methods for voltage control:
1. Tap-changing transformer.
n
2. Booster transformer.
g.i
3. Regulating transformer.
4. Static VAR compensators.
rin
(i) Shunt Capacitors:
Shunt capacitor banks are used to supply reactive power at both transmission and distribution levels; along
lines or sub-stations and loads. Capacitors are either directly connected to a busbar or to the tertiary winding
of a main transformer. They may be switched on and off depending on the changes in loads demand. When
ee
they are in parallel with a load having a lagging power factor, the capacitors supply reactive power.
Shunt capacitors are extensively used in industrial and utility systems at all voltage levels. By
gin
developing higher power density, lower cost improved capacitors and an increase in energy density by a
factor of 100 is possible. These present a constant impedance type of load and the capacitive power output
varies with the square of voltage.
2
V2
En
K var, V2 K var, V1
V1
Where, K var, V1 is output at voltage V1.
arn
K var, V2 is output at voltage V2.
As the voltage reduces, so does the reactive power output, when it is required the most. This is called the
destabilizing effect of power capacitors. Capacitors can be switched in certain discrete steps and do not
provide a step-less control. A two-step sequential reactive power switching control is used to maintain
Le
voltage within a certain band. As the reactive power demand increases, voltage falls.
Rise in Voltage Due to Shunt Capacitance:
The equivalent circuit of a short transmission line with static shunt capacitor is as shown in figure.
w.
ww
Equivalent circuit
P R Q2 X
Voltage drop without the shunt capacitor V 2
V
37
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
P2 R Q2 QC X
Voltage drop with shunt capacitor is V'
V
Q X
Capacitor raises the voltage is VC V V ' C
V
Voltage profile of a radial feeder having a capacitor is depicted in figure.
n
g.i
rin
ee
gin
Voltage Profile
Advantages:
These are less costly.
Flexibility of installation and operation.
En
Power factor improvement.
Efficiency of transmission and distribution of power is high.
Single or multiple banks in industrial distribution at low and medium voltage substation.
arn
Essential elements of SVC and FACTS controllers and HVDC transmission.
Reactive power compensation.
Disadvantages:
They cannot be overloaded.
Le
The reactive power supplied by static capacitors tends to decrease in case of voltage dip on the bus
because KVAr α V 2.
Problems Associated with Shunt Capacitors:
w.
Switching inrush currents at higher frequencies and switching over voltages.
Harmonic resonance problems.
Limited over voltage withstand capability.
ww
Limitations of harmonics current loadings.
Possibility of self-excitation of motors when improperly applied as power factor improvement
capacitors switched with motors.
Applications of using Shunt Capacitor to Distribution System:
Improve power factor.
Improve feeder voltage control.
Power Factor Correction:
To provide reactive power close to the point where it is being consumed, rather than supply it from
remote sources.
Location of Levels of Shunt Capacitors to Improve Power Factor:
38
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
For large consumers - Low voltage banks.
For intermediate switching stations - Medium voltage banks.
For large industrial plants - Individual motors
Group of motors.
Overall plant.
Feeder Voltage Control:
Switched shunt capacitors are used for feeder voltage control.
Location of Shunt Capacitors to improve Feeder Voltage Control:
Shunt capacitors are installed at appropriate locations along the length of the feeder.
Applications of using Shunt Capacitor to Transmission System:
Voltage Regulation.
Reducing Power Loss.
Voltage Regulation:
n
Shunt capacitor banks are connected to HV bus or tertiary winding of the main transformer. Shunt
g.i
capacitors installed at substation to control the voltage within required level. As load varies voltage at the
substation bus and at load bus varies, load power factor is always lagging. A shunt capacitor bank at the
substation can raise voltage when the load is high. Shunt capacitor bank can be permanently connected to the
rin
bus or can be switched as needed by using predictable load variation.
Reducing Power Loss:
Compensating the load lagging power factor with the bus connected, shunt capacitor bank improves
power factor and reduce the current flowing through the transmission line, transformer, generator, etc.
ee
thereby reducing I2R loss or power loss.
(ii) Series Capacitors:
gin
It is connected in series to compensate the inductive reactance of line. This reduces the transfer
reactance between the buses to which the line is connected. It increases maximum power that can be
transmitted and reduces reactive power loss. The reactive power produced by the series capacitor increases
with increase in power transfer; a series capacitor is self-regulating in this regard.
En
The schematic diagram of a series capacitor installation is shown in figure. Under fault condition, the
voltage across the capacitor rise and unlike a shunt capacitor, a series capacitor experiences many times its
rated voltage due to fault currents. A zinc oxide varistor in parallel with the capacitor may be adequate to
arn
limit this voltage.
Le
w.
ww
Schematic diagram of a series capacitor installation
For locations with high fault currents a parallel fast acting triggered gap is introduced which operates for
more severe faults. When the spark gap triggers it is followed by closure of the bypass breaker. The drainage
reactor limits the frequency and magnitude of the current through the capacitor when the gap sparks.
The voltage drop across the line is IR cos r I X L X C sin r .
39
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
It is clear from the vector diagram shown in figure 11 that the voltage drop produced by an inductive load
can be reduced particularly when the line X/R ratio. In practice XC may be so chosen that the factor (XL –
XC) sin φr becomes negative and numerically equal to Rcosφr so that the voltage drop becomes zero. The
ratio XC / XL expressed as a percentage is usually referred to as the percentage compensation.
n
g.i
Phasor diagram when series capacitor is connected on a line
It I is the full load current and XC is the capacitive reactance of the series capacitor, then the drop across the
capacitor us IXC and the VAr rating is I2XC. The voltage boost produced by the series capacitor is,
rin
V IX C sin r .
Drawbacks of Series Capacitor:
High over voltage is produced across the capacitor terminals under short circuit conditions. Therefore,
ee
very high protective equipment is used. Example spark gap.
The drop across the capacitor is IfXC, where If is the fault current of the order of 20 times the full load
gin
current certain circuit conditions.
Reactive power supplied by series capacitors is proportional to the square of the line current and independent
of the line voltage.
En
Location: The locations of series capacitors are:
Mid-point of the line.
Line terminals.
1 1
arn
or th points of the line.
3 4
Problems associated with series capacitors:
Locking of synchronous motor during starting.
Le
R
Hunting of synchronous motor at light load due to high ratio.
X
Ferro resonance occurs between transformers and series capacitors which produces harmonic over
w.
voltages.
Advantages:
To improve voltage regulation of distribution and industrial feeders.
ww
To reduce light flicker problems.
To improve system stability.
Applications:
Voltage rise due to reactive current.
By passing the capacitor during faults and reinsertion after fault clearing.
(iii) Shunt Reactors:
The shunt reactors are used to reduce or limit voltage rise due to open circuit (or) light load. Shunt reactor
absorbs reactive power are usually used for EHV lines longer than and when the far end line is opened, the
receiving line charging current flowing through the large source inductive reactance will cause a rise in
voltage at the receiving end of the line. Ferranti effect will cause a further rise in receiving end voltage.
During heavy loads some of the reactors may have to be disconnected.
40
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Advantages:
Shunt reactor of sufficient size permanently connected to the line to limit fundamental frequency
temporary over voltages.
To limit switching transients.
To maintain normal voltage under light load conditions.
During heavy load conditions, some of the reactors are disconnected by using switching reactors and
circuit breakers.
Location:
Shunt reactors added to maintain normal voltage under light load may be connected to EHV bus as shown in
figure.
n
g.i
rin
Shunt reactors connected to EHV bus
XR1, XR3 – Switchable reactors.
ee
XR2 – Permanently connected reactor.
Shunt reactor connected to the tertiary windings of adjacent transformers as shown in figure.
gin
En
arn
Le
Shunt reactors connected to tertiary winding of transformers
In short transmission lines, no need of connecting shunt reactors permanently, so switchable reactors may be
w.
connected to EHV bus or tertiary winding of transformer. But in some applications, tapped reactors with on
load tap changer are used as shown in figure.
ww
Tapped shunt reactor
41
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
2. Briefly explain role of tap changing transformer in voltage control. (8M) (Nov/Dec 2011)
All power transformers on transmission lines are provided with taps for control of secondary voltage. The tap
changing transformers do not control voltage by regulating the flow of reactive VARs but by changing
transformation ratio.
There are two types of tap changing transformers.
(a) Off-load tap changing transformers.
(b) On-load (Under-load) tap changing transformers (OLTC).
Off-load tap changing transformers:
The off-load tap changing transformer as shown in figure which requires the disconnection of the
transformer when the tap setting is to be changed. Off-load tap changers are used when it is to be operated in
frequently due to load growth or some seasonal change.
n
g.i
rin
Off-load tap changing transformer
On-load tap changing transformers (OLTC): ee
On-load tap changing transformer is used when changes in transformer ratio to be needed frequently, and no
need to switch off the transformer to change the tap of transformer. It is used on power transformers, auto
transformers and bulk distribution transformers and at other points of load service.
gin
The modern practice is to use on-load tap changing transformer which is shown in figure. In the position
shown, the voltage is maximum and since the currents divide equally and flow in opposition through the coil
between Q1 and Q2, the resultant flux is zero and hence minimum impedance.
En
arn
Le
w.
ww
On-load tap changing transformer
To reduce the voltage, the following operations are required in sequence:
i. Open Q1.
ii. Move selector switch S1 to the next contact.
iii. Close Q1.
iv. Open Q2.
v. Move selector switch S2 to the next contact.
vi. Close Q2.
Thus, six operations are required for one change in tap position. The voltage change between taps is often
1.25 % of the nominal voltage.
42
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
System Level Control using Generator Voltage Magnitude Setting:
Transformers transfer the reactive power from one side to another side by altering the inphase component of
the system voltage.Let us consider the tap changing transformer at both ends of a line is shown in figure.
tap ratio
Let t1, t2 be the functions of nominal transformation ratio. i.e.,
nominal voltage
The actual voltage will be t1V1 and t2V2. Let V1, V2 be the nominal voltage at the ends of the line. Since, the
line has impedance, it is necessary to compensate the voltage drop in the line so that the voltage at the
receiving end is maintained at a desired level.
n
g.i
rin
Radial transmission line with on-load tap changing transformer at both ends
To maintain overall voltage level, the minimum range of taps on both transformers is used, t1 t2 is made unit.
ee
P R Q2X
t1 V1 t 2 V2 2
t 2 V2
gin
Put t 2
1 V P R Q 2 X t1
in the above equation, t1 V1 2 2
t1 t1 V2
2
V2 P2 R Q 2 X t12
En
t1 V1
t1 V2
2
t12 V1 V2 P2 R Q 2 X V2
arn
P R Q 2 X V2
Dividing by V1 V2 , we get, t12 1 2
V1 V2 V1
Le
V2
V1
t1
P R Q2X
w.
1 2
V1 V2
For complete line drop compensation, V1 V2
ww
1
t1
P R Q X
1 2 2
2
V
1
Sending end voltage VS = t1 V1
For a given load, given the nominal voltages, we can find t1 and t2 as to keep V2 constant at a specific
value.
For high line drops, the tap changing transformers do not improve voltage profile because it does not
have any reactive power generation capability.
43
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
For small voltage variation or line drop, tap changing transformer is used to improve voltage
magnitude of the system.
Combined use of Tap changing Transformers and Reactive Power Injection:
Normally tap setting are provided in steps for the range of ± 20 %. If the setting exceeds this range, it
is necessary to inject VArs at the load end to maintain the voltage profile and to minimize transmission loss.
A synchronous compensator is connected to the tertiary winding of a three winding transformer as shown in
figure. The equivalent circuit is shown in figure.
n
g.i
rin
ee
Synchronous compensator is connected to tertiary winding of a three winding transformer and
equivalent circuit
gin
Let us find the transformation ratio, Vn = Voltage at the star point,
For analysis, XS and R is very small, therefore neglected.
P R Q2 QC X P
V V1 Vn 2
En
Vn
Since resistance of the line is neglected, V
Q2 QC X P
Vn
arn
P2 X P
Quadrature voltage drop, V
Vn
2 2
V1 Vn V V 2
Le
2 2
2 Q QC X P
Vn 2
P2 X P
V1
Vn Vn
w.
2 2
2
Vn 2 Q 2 Q C X P P X
V1 2 P
ww
V Vn
n
2 2 4 2 2 2
Vn V1 Vn 2 Vn Q2 QC X P Q2 QC X P P2X P
4 2 2 2 2
Vn Vn 2 Q2 QC X P V1 Q2 Q C X P P2 X P 0
Solving above equation, we get Vn .
V2
We can find out off nominal tap setting t. t
Vn
Tap Setting Adjustment for Reactive Power Injection to Large System:
Consider two bus system consists of tap changing transformer as shown in figure(a).
44
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
(a): System interconnected through tap changing transformer
Figure (b) shows an equivalent circuit with the impedance transferred to bus 2.
n
g.i
(b): Equivalent circuit with the impedance transferred to bus 2
rin
Then, V1 V2 V
X 2 X
V1 Q. 2 V2 Q. 2
At (a), V2 t t ee
t V2 V2
QX V1 V2 2
V2
gin
2
t t
2
V1 V2 t V2 t 2 V2 V1 V2 t t
Q
X X
En
By changing t, we can change VAr requirement due to reactance X and to minimize transmission loss.
t< 1, Q is +ve, flow of lagging VAR to bus 2.
t> 1, Q is –Ve, flow of leading VAR to bus 2.
arn
3. What is static VAR compensator? Where it is used? Explain its operation. Also state the merits of
static VAR compensator over the other methods of voltage control. (16) (Nov/Dec 2011)
Static VAR Compensators are located in receiving substations and distribution systems for smooth
and step-less variation of compensation of reactive power injected into line, by shunt capacitors and shunt
Le
reactors. SVCs are used because SVC at suitable points of a transmission system can maintain specific
voltage profile and can limit the voltage and frequency deviations under disturbances. Further the transient
stability can be improved and the system transmission capacity can be increased both under operating and
w.
fault conditions.The reactor control is done by an anti-parallel thyristor switch assembly. The firing angle of
the thyristors governs the voltage across the inductor, so, the reactor current and reactive power absorption
by the inductor can be controlled.
ww
Let QC be the reactive power charging by the capacitor.
Let QL be the reactive power absorbed by the inductor.
Net reactive power injected to the bus Q = QC – QL.
By varying QL, QC can be controlled.
For light load condition QL> QC.
For heavy load condition QC> QL.
Figure shows schematic diagram of static VAR compensator.
45
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Static VAR Compensator
Advantages of SVC:
Bus voltage can be controlled.
n
Improves system stability, voltage stability.
Reduces power oscillations.
g.i
Minimize transmission loss.
Types of SVC:
Saturated reactors [SR].
rin
Thyristor Controlled Reactor [TCR].
Thyristor Switched Capacitor [TSC].
Thyristor Switched Reactor [TSR]. ee
Thyristor Controlled Transformer [TCT].
Fixed Capacitor and Thyristor Controlled Reactor [FC – TCR].
Thyristor Switched Capacitor and Thyristor Controlled Reactor [TSC – TCR].
gin
Self or Line Commutated Converter [SCC / LCC].
Fixed Capacitor and Thyristor Controlled Reactor [FC – TCR]:
The circuit diagrams of a FC – TCR, with switched filters are as shown in figure. This arrangement provides
En
discrete leadings VARs from the capacitors and continuously lagging VARs from thyristor controlled
reactor. The capacitors are used as tuned filters, as considerable harmonics are generated by thyristor control.
The steady state characteristics of a FC – TCR is shown in figure. The control range is AB with a positive
slope, determine by the firing angle control.
arn
Q b c b1 V 2
Where bc is the susceptance of the capacitor, b1(α) is the susceptance of the inductor at firing angle α.
As the inductance is varied, the susceptance varies over a large range. The voltage varies within limits V ±
Le
ΔV. Outside the control interval AB, the FC – TCR acts like an inductor in the high voltage range and like a
capacitor in the low voltage range. The response time is of the order of one or two cycles. The compensator
is designed to provide emergency reactive and capacitive loading beyond its continuous steady state rating.
w.
ww
V-Q characteristics of FC-TCR
46
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Thyristor Switched Capacitor and Thyristor Controlled Reactor [TSC – TCR]:
To control the current through a reactor, with new elements Thyristor Controlled Reactor (TCR) and
Thyristor Switched Capacitor (TSC) to meet reactive power generation and absorption demands. Improved
performance under large system disturbance and lower power loss are obtained.
n
g.i
rin
TSC-TCR
ee
Each thyristor switch is built up from two thyristor stacks connected in anti-parallel. Each single phase
thyristor switched capacitor consists of the capacitor, thyristor switch and reactor to limit the current through
the thyristors and to prevent resonance with the network as shown in figure.
gin
The problem of achieving transient free switching ON of the capacitor is overcome by keeping the
capacitor charged to the positive or negative peak value, when they are in the stand by state. The switching
on instinct is then selected at the time when the network has its maximum or minimum value and the same
polarity as the capacitor voltage. Switching of the capacitor is accomplished by separation of the firing pulses
En
to the anti-parallel thyristors so that the thyristors will block as soon as the current becomes zero.
The capacitor will then remain charged to the positive or negative peak voltage and be prepared for
the new transient free switching on.
arn
The V-I characteristics is as shown in figure. A certain short time overload capability id provided
both in the maximum inductive and capacitive regions. Voltage regulation with a given slope can be achieved
in the normal operating range. The maximum capacitive current decreases linearly with the system voltage
and the SVC becomes a fixed capacitor when the maximum capacitive output is reached.
Le
The voltage support capability decreases with decrease in system voltage.
w.
ww
VI characteristics of an SVC (TSC-TCR)
Advantages:
47
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
SVCs are suited to control the varying reactive power demand of large fluctuating loads (i.e., rolling
mills and arc furnaces).
It is used in HVDC converter stations for fast control of reactive power flow.
The midpoint voltage will vary with the load and an adjustable midpoint susceptance is required to
maintain constant voltage magnitude.
The transmitted electrical power can be increased be capacitive VARs when the machine accelerates
and it can be decreased by reactive VARs when the machine decelerates because it has no inertia.
Less maintenance.
Possibility to regulate the phases individually
4. i) Discuss the relations between Voltage and Reactive Power at a Node. (8M) (Nov/Dec 2012)
The phase voltage ‘V’ at a node is a function of real and reactive power at that node.
i.e., V f P, Q
n
V V
Differentiating, dV .dP+ .dQ
g.i
P Q
dP dQ
dV +
rin
P Q
V V
P Q
ee
The change in voltage at a node is defined by and .
V V
Consider a short transmission line with series impedance R + jX, as shown in figure.
gin
En
arn
Short line
E V IZ V I R jX
V V0o (reference)
Le
S* P jQ
I *
V V
w.
P jQ
Change in voltage V E V I R jX R jX
V
ww
PR QX PX QR
V j
V V
PR QX
EV
V
PX QR
is small, so it may be neglected.
V
Calculate real power:
48
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
PR QX
EV
V
E V V PR QX
PR E V V QX
Real Power P
E V V QX EV V 2 QX
R R R R
Partially differentiating P with respect to V, we get
P E 2V
V R
n
Calculate reactive power:
g.i
PR QX
EV
V
rin
E V V PR QX
QX E V V PR
Reactive Power Q
E V V PR EV V 2 PR
ee
X X X X
gin
Partially differentiating Q with respect to V, we get
Q E 2V
V X
En
dP dQ dP dQ
We know, dV + +
P Q E 2V E 2V
arn
V V R X
RdP XdQ RdP XdQ
dV +
E 2V E 2V E 2V
Le
For constant voltage V and ΔV,
RdP XdQ = 0
XdQ RdP
w.
RdP
dQ
X
ww
Q
The quantity can be determined by using a network analyzer by the injection of a known quantity of
V
VARs at the node and measuring the difference in voltage produced at that node.
Partially differentiating Q with respect to V, we get
Q E 2V
V X
Q
If X is small, is large.
V
49
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Q
ΔV is small, when the number of lines meeting at a node is more, therefore X is small. So is large and
V
has the value of 10 – 15 MVAr / KV.
Q
and short circuit at a node:
V
If the three phases at the receiving end are short circuited, E = V.
Q Q E 2V E 2E E
Substituting in , we get Amp
V V X X X
Q
is short circuit current and sign decides the nature of the reactive power (absorbed or generated).
V
n
g.i
4. ii) Explain briefly the reactive power requirement for control of voltage in long radial lines. (8M)
(Nov/Dec 2012)
` Voltage at various buses of the power system needs to be maintained at rated values within certain
rin
specified limits. The voltage depends upon the net reactive power injected at any bus and so is a localized
problem.
Service voltage is usually specified by a nominal value and the voltage is then maintained close to
ee
this value, deviating not more than 5% of the nominal value.
The voltage at a bus can be controlled by the injection of reactive power of the correct sign. Various
reactive power sources are used for controlling the voltage such as Excitation Systems, Static capacitors,
gin
Shunt reactors, Synchronous compensators and static VAR compensators and other means are tap-changing
transformers and regulating transformers.
For efficient and reliable operation of power system should have the following
All the machines and equipment are designed to operate at a certain voltage operation above
En
or below the allowable range could damage them.
System stability is increased to maximize utilization of the transmission system voltage and
reactive power control has a significant impact on system.
arn
The reactive power flow is minimized so as to reduce I2R and I2X losses and to operate the
transmission system efficiently.
The reactive power cannot be transmitted over long distance, voltage control has to be
Le
affected by using special devices disp throughout the system.
5. Develop a typical excitation arrangement to control the voltage of an alternative and explain. (8M)
(Nov/Dec 2011)
Draw the diagram of a typical automatic voltage regulator and develop its block diagram
w.
representation. (16) (Nov/Dec 2013)
Static excitation system
ww
In a static exciter the excitation power is obtained directly from the generator terminals or from the
Station Service bus through step-down transformer. The AC power is rectified in thyristor (silicon controlled
rectifier) bridges and fed into the main generator field through slip rings. Static exciters are very fast and
contribute to improved “transient stability”. A typical static excitation system is shown in Fig.
50
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
Brushless excitation system
g.i
It consists of an AC generator and Thyristor rectifier bridge, directly mounted on the alternator shaft.
The advantage of this method of excitation is that the moving contacts comprising slip rings and brushes are
completely eliminated, thus offering smooth and maintenance-free operation. It is, therefore, known as
rin
brushless excitation system. A typical brushless excitation system is shown in Fig. Modern exciters are either
brushless or static type.
ee
gin
En
arn
Le
Small Signal Analysis: The analysis of power system dynamics falls in to two categories depending upon
w.
the actuating signal. These are
Large Signal Analysis;
Small Signal Analysis.
ww
Large Signal Analysis is carried out to study the effect of major disturbances - Generator voltages and
powers may undergo sudden changes in magnitudes that may approach 100% of normal operating values.
This type of analysis leads to differential equations of non-linear type. Symbols used for such analysis
are f, and V representing actual frequency, power angle and voltage magnitude respectively.
Small Signal Analysis is used when the variation in the system parameters is relatively small,
typically a few percent of normal operating values. Differential equations are mostly linear and the powerful
Laplace Transform analysis methods can be employed. We use the symbols f, and V to mean the
deviations of frequency, angle and voltage magnitude from normal operating values.
Automatic Voltage Regulator (AVR) : The exciter is the main component in the AVR loop. It modifies
the DC power to the generator field based on the feedback from AVR. The basic role of the AVR is to
provide constancy of the generator terminal voltage during normal condition and when there are small and
51
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
slow changes in the load. It is common practice to design the exciter with enough margins to give powerful
boost in the excitation level during emergency situations.
Brushless Exciter
A typical brushless exciter with AVR loop is shown in Fig. The exciter consists of an “inverted” 3
phase synchronous generator, that is 3-phase armature on the rotor and field on the stator. Its armature
voltage is rectified in thyristors mounted on the rotating shaft and then fed directly into the main generator
field.
Exciter Modeling
Assume that for some reason the terminal voltage |V| would decrease. This immediately results in an
increased “error voltage” e which in turn causes increased values of vR , ie, vf and if. The d axis generator flux
increases as a result of the boost in if, thus raising the magnitude of the internal generator emf E and terminal
voltage V.
Mathematical modeling of the exciter and its controls follow:
n
Comparator:
g.i
rin
ee
gin
En
arn
Le
w.
ww
52
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
TA and Te have values in the ranges 0.02 – 0.10 and 0.5 – 1.0 sec. respectively.
ee
Generator Modeling
The terminal voltage equals the internal emf minus the voltage drop across the internal impedance.
The relationship between Vf and |V|, therefore, depends on the generator loading.
gin
The simplest possible relationship exists at low or zero loading in which case |V| equals
approximately the internal emf |E|.
KVL applied to the field winding gives
En
arn
Le
w.
ww
53
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
UNIT-IV – COMMITMENT AND ECONOMIC DISPATCH
PART A
1. What is meant by FLAC? (Nov/Dec 2013)
Full load average production cost={net heat rate at full load}*fuel cost
C P K.H i PGi
FLAPC i Gi
PGi PGi
2. Write the conditions for the optimal power dispatch in a lossless system. (Nov/Dec 2013)
54
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Let N be the number of generators
Let the total controllable system production cost be C = i
Ci – Fuel cost
C – Total cost
Constrains : A set of real generation variables PGi must be selected that will minimize the cost
function.
Equality constrains
PD PD tot – PG base
Inequality constrains
PGi,min PGi PGi,max for i = 1,2,…..N
3. What is incremental cost criteria? (Nov/Dec 2012)
Input – Output curves are continuous
n
First derivative of input – output curves are continuous
g.i
The incremental rate increases with increase in output
4. Name some thermal constraints in unit commitment problem (Nov/Dec 2012)
Thermal Unit Constraints
rin
Minimum up and down time:
Ramp rate constraints:
Fuel constraint ee
5. Write the equality and inequality constraints considered in the economic dispatch problem.
(Nov/Dec 2011)
gin
The equality and inequality constraints for economic dispatch problem are
= N co-ordination equations
En
PL = I 1 equality constraint
Pi ,min < Pi < Pi ,max 2N inequality constraints
6. Define spinning reserve constraint in unit commitment problem. (Nov/Dec 2011)
arn
Spinning reserve is the total amount of generation available from all units synchronized on the system
minus the present load and losses being supplied.
Total amount
Spinning Reserve = Present load + Losses
Le
of generation
7. Define participation factor. (Nov/Dec 2009)
Suppose the economic dispatch problem has to be solved repeatedly by moving the generators from
w.
one economically optimum schedule to another as the load changes by a reasonably small amount. Then
The initial optimal schedule in which the generator operates is called the base point and
The factor indicating how much the generating unit needs to participate in the load change so as to
ww
serve the new load at the most economic operating point is called the participation factor.
8. Draw incremental cost curve for a thermal plant. (May/Jun 2009)
Incremental Fuel cost, IC =
Where, F is the fuel cost and P is the power output of the plant
Incremental cost is the slope of cost curve. The Incremental cost curve for a typical Thermal Plant is shown
in the following figure.
55
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
9. What is priority list method? (Nov/Dec 2009)
n
Priority list method is the simplest unit commitment solution method which consists of creating a
priority list unit.
g.i
The priority list can be obtained by noting the full-load average production cost of each unit.
Assumptions:
No load costs are zero.
rin
Unit input – output characteristics are linear between zero output and full load.
Start-up costs are a fixed amount.
Ignore minimum up time and minimum down time. ee
10. Distinguish between economic dispatch and unit commitment. (May/June 2014)
gin
Unit commitment Economic load dispatch
Optimum allocation of number Optimum allocation of generation to each
station
Of units to be operated
En
There are number of subsets of the complete problem assumes that there are ‘n’ units
set of ‘n’ units that would satisfy the expect already connected to the system.
arn
demand
Purpose of unit commitment is to find the Purpose of unit commitment is to find the
optimal subset among the subsets which optimal operating policy for these ‘n’ units
Le
provide the minimum operating cost.
PART B
w.
1.What is unit commitment problem? Explain various constraints involved in unit commitment
problem. (May 2013, May 2016)
CONSTRAINTS IN UNIT COMMITMENT
ww
Many constraints can be placed on the unit commitment problem. The list presented here is by no
means exhaustive.
Each individual power system, power pool, reliability council, and so forth, may impose different
rules on the scheduling of units, depending on the generation makeup, load-curve characteristics, and
such.
Spinning Reserve
Spinning reserve is the term used to describe the total amount of generation available from all units
synchronized (i.e., spinning) on the system, minus the present load and losses being supplied.
Spinning reserve must be carried so that the loss of one or more units does not cause too far a drop in
system frequency.
56
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Quite simply, if one unit is lost, there must be ample reserve on the other units to make up for the loss
in a specified time period.
Spinning reserve must be allocated to obey certain rules, usually set by regional reliability councils
(in the United States) that specify how the reserve is to be allocated to various units.
Typical rules specify that reserve must be a given percentage of forecasted peak demand, or that
reserve must be capable of making up the loss of the most heavily loaded unit in a given period of
time.
Others calculate reserve requirements as a function of the probability of not having sufficient
generation to meet the load.
Not only must the reserve be sufficient to make up for a generation-unit failure, but the reserves must
be allocated among fast-responding units and slow-responding units.
This allows the automatic generation control system to restore frequency and interchange quickly in the
event of a generating-unit outage. Beyond spinning reserve, the unit commitment problem may involve
n
various classes of “scheduled reserves” or “off-line” reserves. These include quick-start diesel or gas-
g.i
turbine units as well as most hydro-units and pumped-storage hydro-units that can be brought on-line,
synchronized, and brought up to full capacity quickly. As such, these units can be “counted” in the overall
reserve assessment, as long as their time to come up to full capacity is taken into account. Reserves, finally,
rin
must be spread around the power system to avoid transmission system limitations (often called “bottling” of
reserves) and to allow various parts of the system to run as “islands,” should they become electrically
disconnected.
Thermal Unit Constraints ee
Thermal units usually require a crew to operate them, especially when turned on and turned off.
A thermal unit can undergo only gradual temperature changes, and this translates into a time period of
gin
some hours required to bring the unit on-line.
As a result of such restrictions in the operation of a thermal plant, various constraints arise, such as:
1. Minimum up time: once the unit is running, it should not be turned off immediately
2. Minimum down time: once the unit is decommitted, there is a minimum time before it can be
En
recommitted.
Cc = cold-start cost (MBtu)
F = fuel cost
arn
Cf= fixed cost (includes crew expense, maintenance expenses) (in R)
α = thermal time constant for the unit
t = time (h) the unit was cooled
Start-up cost when banking = Ct x t x F+Cf
Le
Where
Ct = cost (MBtu/h) of maintaining unit at operating temperature
Up to a certain number of hours, the cost of banking will be less than the cost of cooling, as is
w.
illustrated in Figure.
Finally, the capacity limits of thermal units may change frequently, due to maintenance or unscheduled
ww
outages of various equipment in the plant; this must also be taken.
Hydro-Constraints
Unit commitment cannot be completely separated from the scheduling of hydro-units.
In this text, we will assume that the hydrothermal scheduling (or “coordination”) problem can be
separated from the unit commitment problem.
We of course, cannot assert flatly that our treatment in this fashion will always result in an optimal
solution.
Hydro Constrains
Must Run
Some units are given a must-run status during certain times of the year for reason of voltage support on the
transmission network or for such purposes as supply of steam for uses outside the steam plant itself.
57
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Fuel Constraints
We will treat the “fuel scheduling” problem system in which some units have limited fuel, or else have
constraints that require them to burn a specified amount of fuel in a given time, presents a most challenging
unit commitment problem.
2.What is priority list method of unit commitment?Explain it with an example.(April2015)
The simplest unit commitment solution method consists of creating a priority list of units. As a simple shut-
down rule or priority-list scheme could be obtained after an exhaustive enumeration of all unit combinations
at each load level. The priority list of Example 5B could be obtained in a much simpler manner by noting the
full- load average production cost of each unit, where the full-load average production cost is simply the net
heat rate at full load multiplied by the fuel cost.
Priority List Method:
Priority list method is the simplest unit commitment solution which consists of
n
creating a priority list of units.
g.i
Full load average production cost= Net heat rate at full load X Fuel cost
Assumptions:
1. No load cost is zero
rin
2. Unit input-output characteristics are linear between zero output and full load
3. Start up costs are a fixed amount
4. Ignore minimum up time and minimum down time
Steps to be followed ee
1. Determine the full load average production cost for each units
2. Form priority order based on average production cost
gin
3. Commit number of units corresponding to the priority order
4. Alculate PG1, PG2 ………….PGN from economic dispatch problem for the feasible
combinations only.
5. For the load curve shown.
En
Assume load is dropping or decreasing, determine whether dropping the next unit will supply
generation & spinning reserve.
If not, continue as it is
If yes, go to the next step
arn
6. Determine the number of hours H, before the unit will be needed again.
7. Check H< minimum shut down time.
If not, go to the last step If yes, go to the next step
8. Calculate two costs
Le
1. Sumof hourly production for the next H hours with the unit up
2. Recalculate the same for the unit down + start up cost for either cooling or banking
9. Repeat the procedure until the priority
w.
Merits:
1. No need to go for N combinations
2. Take only one constraint
ww
3. Ignore the minimum up time & down time
4. Complication reduced
Demerits:
1. Start up cost are fixed amount
2. No load costs are not considered
3.Explain the dynamic programming solution for unit commitment with flowchart.(April 2016,Nov
2013)
Dynamic programming has many advantages over the enumeration scheme, the chief advantage being
a reduction in the dimensionality of the problem. Suppose we have found units in a system and any
58
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
combination of them could serve the (single) load. There would be a maximum of 24 - 1 = 15 combinations
to test. However, if a strict priority order is imposed, there are only four combinations to try:
Priority 1 unit
Priority 1 unit + Priority 2 unit
Priority 1 unit + Priority 2 unit + Priority 3 unit
Priority 1 unit + Priority 2 unit + Priority 3 unit + Priority 4 unit
The imposition of a priority list arranged in order of the full-load averagecost rate would
result in a theoretically correct dispatch and commitment only if:
1. No load costs are zero.
2. Unit input-output characteristics are linear between zero output and full load.
3. There are no other restrictions.
4. Start-up costs are a fixed amount.
n
In the dynamic-programming approach that follows, we assume that:
g.i
1. A state consists of an array of units with specified units operating and
2. The start-up cost of a unit is independent of the time it has been off-line
3. There are no costs for shutting down a unit.
4. There is a strict priority order, and in each interval a specified minimum the rest off-line. (i.e., it is a fixed
rin
amount).amount of capacity must be operating.
A feasible state is one in which the committed units can supply the required load and that meets the minimum
amount of capacity each period. ee
Forward DP Approach
One could set up a dynamic-programming algorithm to run backward in time starting from the final
gin
hour to be studied, back to the initial hour.
Conversely, one could set up the algorithm to run forward in time from the initial hour to the final
hour.
The forward approach has distinct advantages in solving generator unit commitment. For example, if
En
the start-up cost of a unit is a function of the time it has been off-line (i.e., its temperature), then a
forward dynamic-program approach is more suitable since the previous history of the unit can be
computed at each stage.
There are other practical reasons for going forward.
arn
The initial conditions are easily specified and the computations can go forward in time as long as
required.
The recursive algorithm to compute the minimum cost in hour K with combination
Le
Fcost(K,I)= min[Pcost(K,I)+Scost(K-1,L:K,I)+Fcost(K-1,L)]
Where
Fcost(K, I ) = least total cost to arrive at state ( K , I )
w.
Pcost(KI, ) = production cost for state ( K ,I )
Scost(K - 1, L: K , I)= transition cost from state (K - 1, L) to state ( K , I )
State (K, 1) is the Zth combination in hour K.
ww
For the forward dynamic programming approach, we define a strategy as the transition, or path, from one
state at a given hour to a state at the next hour.
Note that two new variables, X and N, have been introduced in Figure.
X = number of states to search each period
N = number of strategies, or paths, to save at each step
These variables allow control of the computational effort (see below Figure).For complete enumeration, the
maximum number of the value of X or N is 2n – 1
59
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
60
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
61
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
62
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
63
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
64
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
65
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
66
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
67
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
68
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
UNIT-V – COMPUTER CONTROL OF POWER SYSTEMS
PART A
1. What are the functions of SCADA? (Nov/Dec 2013)
The main functions of SCADA systems are
i. Monitoring
ii. Alarm
iii. Control Data logging
iv. Data acquisition
v. Control On / Off, Raise / Lower
vi. Display
2. What is state estimation? (Nov/Dec 2013)
This is the process of assigning a value to unknown system state variable based on measurements
n
from that system according to some criteria i.e., minimizing the some of the square of differences between
g.i
the estimated and true value.
3. What is SCADA?
It stands for supervisory control and data acquisition system, allow a few operators to monitor the
generation and high voltage transmission systems and to take action to correct overloads.
rin
SCADA refers to a system that enables an electricity utility to remotely monitor, coordinate, control
and operate transmission and distribution. Components, equipment and devices in a real time mode from a
remote location with acquisition of data for analysis and planning from one control location.
ee
4. Define network topology in power system
Before running the State Estimation program network topology, that is how the transmission lines are
gin
connected to the load and generator buses must be known. The network topology keeps on changing and
hence the current telemetered circuit breaker status must be used to determine the connectivity of the network
and to restructure the electrical system model. The Program accomplishing this is called the network
topology program or network configurator or system status processor.
En
5. Define EMS system
Energy management is the process of monitoring, coordinating and controlling the generation,
transmission and distribution of electrical energy. It is performed at centres called ‘system control centres’,
by a computer system called Energy Management System (EMS).
arn
6. What is the function of load dispatch center
Frequency
Tie-line flow
Le
Event recording
Spinning reserves
Status changes
w.
Energy transaction.
7. What is emergency state?
The system is said to be in emergency state if one or more operating constraints are violated, but the
ww
load constraint is satisfied. In this state, the equality constraints are unchanged. The system will return to the
normal (secure) or alert state by means of corrective actions, i.e., disconnection of faulted section or load
shedding.
The generator still tracts the load and the system is still synchronized. But one or several components
are overloaded. As the components eventually fail, the system will start disintegrate.
8. List the applications of SCADA. (Nov/Dec 2014)
Types of SCADA systems and areas of applications:
Type 1: Small distribution systems, small hydro stations, HVDC links.
Type 2: Medium sized power system (plant control centre), power station HVDC link distribution
systems.
69
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Type 3: Regional control centre, distribution system in large urban areas several hydro power stations
with cascade control.
Type 4: National and Regional control centre distributed systems in large urban areas, several hydro
power station with cascade control.
9. What are the objectives of automatic generation control? (May/June 2014)
To hole frequency at Or very close to specified nominal value
To maintain the correct value of interchange power between control area
To maintain each units generation at most economic value
10. Define restorative state. (May/June 2014)
From this state, the system may be brought back either to alert state or secure state. The latter is a
slow process. Hence, in certain cases, first the system is brought back to alert state and then to the secure
state. This is done using restorative control action.
n
PART B
g.i
1. Explain the security monitoring using state estimation with necessary diagrams. (16M) (Nov/Dec
2013)
rin
ee
gin
En
arn
Le
w.
ww
Security analysis
Security monitoring is the on-line identification of the actual operating conditions of a power system.
It requires system wide instrumentation to gather the system data as well as a means for the on-line
determination of network topology involving an open or closed position of circuit breakers. A state
estimation has been developed to get the best estimate of the complex bus voltage at any instant from the
redundant set of telemetered data and breaker status. The state estimation provides the database for security
analysis as shown in figure.
70
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
The estimated values are then checked against the overload limits. If o limit is violated, the output of
the estimator may be used for contingency evaluation. Hence overload limits are reached; suitable remedial
measures help the operator to choose between rescheduling, line switching and load shedding.
Telemetry System (Security Monitoring System):
The functioning of a security monitoring system is shown in figure. Effective operation of power
system required that critical quantity be measured and the values of measurements be transmitted to a central
location. Such system of measurements and data transmission are called telemetry systems.
Telemetered data and information regarding breaker position received from the system are processed
first by the state estimator. The output of the state estimator is then fed into the security analyzer. Other
information like contingencies to be evaluated and associated constraints is also fed into the security
analyzer. The security analyzer evaluates the impact of the above contingencies with the help of fast load
flow techniques. Thus, the real-time data are processed in the control centres and are scanned by the security
analyzer to ascertain whether the operating condition is secured.
n
g.i
The security monitoring function are given below:
Function Function performed
1. Data acquisition To Process message from RTUs.
rin
To check analog measurements against limits.
To check status values against normal value.
ee
To send alarm conditions to alarm processor.
2. Alarm processor To send alarm message.
gin
To transmit message according to priority.
3. Status processor To determine status of each substation for proper
connection.
En
4. Reserve monitor To check generator MW output on all units against unit
limits.
arn
5. State estimator To determine system state variables.
To detect the presence of bed measured values.
To identify the location of bed measurements.
Le
To initialize the network model for other programs.
Power system must be designed to stabilize and to operate at acceptable voltage, frequency without
w.
loss of load. Security control executing the program by using study sequence. They are:
Determine the system state based on current and postulated conditions.
Create the occurrence of contingency events and determine the system state.
ww
For the severe contingency events, determine preventive and corrective action.
71
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
Practical security monitoring system
Real-time ad study security analysis sequences are shown in figure. State estimators are executed
En
depends on the demand or status change due to circuit breaker operation like opening of the line, etc.
From figure the state estimator receives information from SCADA system and the network topology
and stores the state of the system (V and δ) in a central location called database. Power system application
arn
like power flow, optimal power flow, contingency analysis and short circuit analysis are executed using the
state of the system were computed by state estimation.
Le
w.
ww
Real time network analysis sequence
Security Control Functions:
Network Topology Processor: To determine model of the network.
State estimator: To determine the best estimate of the state of the system using real time status
and measurements.
72
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Power flow: To calculate V, δ, power flows for the steady state condition.
Contingency analysis: To determine the events which are harmful to the system by determining
the states.
Optimal power flow: to optimize a specified objective function by using controller action.
Security enhancement: to alleviate an existing overload in the system by using corrective control
actions.
Preventive action: Before the occurrence of contingency event, preventive action has to be taken.
Bus load forecasting: To forecast the load by using real time measurements.
Transmission loss factors: To calculate the impact on transmission losses by using incremental
transmission loss (ITL).
Short circuit analysis: To determine the fault current for different types of faults like LG, LL,
LLG, 3φ.
n
2. What is EMS? What are its major functions in power system operation and control? (6M) (Nov/Dec
g.i
2013)
rin
ee
gin
En
arn
Le
w.
ww
Energy management system
Energy management is the process of monitoring, coordinating and controlling the generation,
transmission and distribution of electrical energy. It is performed at centres called ‘system control centres’,
by a computer system called Energy Management System (EMS). Data acquisition and remote control is
performed by the computer system called SCADA, which forms the front end of EMS. The EMS
communicates with generating, transmission and distribution systems through SCADA systems.
Energy Management:
73
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Automatic generation control and economic dispatch minimize the production cost ad transmission
cost. Commit the number of units to be operated to minimize the cost and schedule hydro-thermal plants
properly have come under energy management.
Energy management system consists of energy management, AGC, security control, SCADA, load
management as show in figure.
The functions of energy management systems are:
System load forecasting – Hourly energy, 1 to 7 days.
Unit commitment – 1 to 7 days.
Fuel scheduling to plants.
Hydro-thermal scheduling – upto 7 days.
MW interchanges evaluation – with neighboring system.
Transmission loss minimization.
Security constrained dispatch.
n
Maintenance scheduling.
g.i
Production cost calculation.
Load Management – Carried out at Distribution Control Centre:
Remote terminal unit (RTU) installed at distribution substations, can provide status and
rin
measurements for distribution substation. RTU can monitor switches, interrupters, control voltage, customer
meter reading, etc.
The functions of load managements are:
Data acquisition. ee
Monitoring, sectionalizing switches and create circuit configuration.
Feeder switch control and preparing distribution map.
gin
Preparation of switching orders.
Customer meter reading.
Load management – control customer load.
Fault location ad circuit topology configuration.
En
Service restoration.
Power factor and voltage control.
Implementation time dependent pricing.
arn
Circuit continuity analysis.
To control customer load through appliance switching and indirectly through voltage control.
3. Draw a block diagram to show the hardware components of a SCADA system for a power system
Le
and explain the application of SCADA in monitoring and control of power system. (10M) (Nov/Dec
2013)
Discuss the functions of SCADA in power system operation. (16M) (Nov/Dec 2012)
Briefly explain various functions of SCADA with neat diagram. (10M) (Nov/Dec 2011)
w.
It consists of a master station and RTUs linked by communication channel. The hardware components
can be classified into:
ww
1. Process computer and associated hardware at the Energy Control Centre.
2. RTUs and the associated hardware at the remote stations.
3. Communication equipment that links the RTUs and process computers at the master station.
System Hardware Configuration:
The supervisory control and data acquisition system allows a few operators to monitor the generation
and HV transmission system. Consistent with principles of high reliability and fail safe features, electric
utilities have almost universally applied a redundant set of dual digital computers for the functions of remote
data acquisition control, energy management and system security. Both computers have their own core
memory and drive an extensive number of input-output devices such as printers, teletypes, magnetic tape
drive, and disks and so on.
74
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
Usually one computer, the on-line units, is monitoring and controlling the power system. The backup
computer may be executing off-line batch programs such as load forecasting to hydro-thermal allocation. The
on-line computer periodically updates a disk memory shared between the two computers.
Upon a fail over or switch-in status command, the stored information of the common disk is inserted
in the memory of the on-line computer.
The information used by the on-line computer has a maximum age of update cycle. The figure gives a
detailed block diagram of a typical digital computer control and monitoring for power systems.
All of the peripheral equipment is interfaced with the computer through input-output microprocessors
that have been programmed to communicate, as well as preprocess the analog information, check for limits,
convert to another system of units and so on.
n
g.i
rin
ee
gin
En
arn
Le
The microprocessors can transfer data in and out of computer memory without interrupting the central
processing unit. As a result of these precautions, for all critical hardware functions, there is often a
w.
guaranteed 99.8 % or more availability. Software also allows for multilevel hardware failures and
initialization of application programs, if failures occur. Critical operations and functions are maintained
during either preventive or corrective maintenance.
ww
Besides hardware, new digital code to control the system may be compiled and tested in the backup
computer, then switched to on-line status. The digital computers are usually employed in a fixed cycle
operating mode, with priority interrupts wherein the computer periodically performs a list of operations. The
most critical functions have the fastest scan cycle. Typically, the following categories are scanned every two
seconds.
All status points such as switchgear position, substation loads and voltages, transformer tap
positions and capacitor banks.
Tie-line flows and interchanges schedules.
Generators loads, voltage, operating limits ad boiler capacity.
Telemetry verification to detect failures and errors in the remote bilateral communication links
between the digital computer and the remote equipment.
75
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
The turbine generators are often commanded to new power levels every four seconds, sharing the
load adjustment based on each unit’s response capability in MW/min. The absolute power output of each
unit’s response capability is typically adjusted every five min by the computer executing an economic
dispatch program to determine the base power setting.
Most low priority programs may be executed on demand by the operator for study purposes or to
initialize the power system. An operator may also alter the digital computer code in the execution if a
parameter changes in the system. The computer software compiler and data handlers are designed to be
versatile and readily accepts operator inputs.
Types of SCADA systems and areas of applications:
Type 1: Small distribution systems, small hydro stations, HVDC links.
Type 2: Medium sized power system (plant control centre), power station HVDC link distribution
systems.
Type 3: Regional control centre, distribution system in large urban areas several hydro power stations
n
with cascade control.
g.i
Type 4: National and Regional control centre distributed systems in large urban areas, several hydro
power station with cascade control.
4.What is normal operating states of a power system? Describe in detail the various states that a power
rin
system takes with their operating conditions. (Apr 2015)
A power system may be operated in several different states. These are classified into five operating
states. They are:
1. Normal state (Secure state). ee
2. Alert state.
3. Emergency state.
gin
4. Extremis state.
5. Restorative state.
The five operating states and their transitions are shown in figure
1. Normal state (Secure state)
En
A system is said to be in normal state if both load and operating constraints are satisfied. It is one in
which the total demand on the system is met by satisfying all the operating constraints (i.e., equality (E) and
inequality (I) constraints.
arn
The normal state of the system is said to be secure state if all postulated contingency states are found
to be normal. A normal state of the system is said to be insecure if one or more of the postulated contingency
state consists of the constraint limit violated. In this state, frequency and the bus voltage magnitude are
within the normal operating range. Current flows on all transmission lines are within the given ratings.
Le
Transformers and generators and operated within their ratings and there is no load shedding anywhere in the
system. Reserve margin is sufficiently high to make the system well secure.
2. Alert state
w.
A normal state of the system is said to be in alert state if one or more of the postulated contingency
states, consists of the constraints limits violated. When the system security level falls below a certain level or
the probability of disturbance increases, the system may be in alert state. All equalities (E) and inequality (I)
ww
are satisfied, but on the event of a disturbance, the system may not have all the inequality constraints
satisfied. If a severe disturbance occurs, the system will push into emergency state. To bring back the system
to secure state, preventive control action is carried out.
76
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
System states and transition
3. Emergency state ee
The system is said to be in emergency state if one or more operating constraints are violated, but the
load constraint is satisfied. In this state, the equality constraints are unchanged. The system will return to the
normal (secure) or alert state by means of corrective actions, i.e., disconnection of faulted section or load
gin
shedding.
The generator still tracts the load and the system is still synchronized. But one or several components
are overloaded. As the components eventually fail, the system will start disintegrate.
En
4. Extremis state
When the system is in emergency state, if no proper corrective action is taken in time, then it goes to
either serious emergency state or extremis state. In this, neither the load nor the operating constraint is
satisfied; this results in islanding. Also the generating units are strained beyond their capacity. So, emergency
arn
control action is done to bring back the system state either to the emergency state or normal state.
5. Restorative state
From this state, the system may be brought back either to alert state or secure state. The latter is a
Le
slow process. Hence, in certain cases, first the system is brought back to alert state and then to the secure
state. This is done using restorative control action.
5. Explain the various controls for secure operation. (May 2014)
w.
The practice of all communication links between equipment and the control centre could be
interrupted and still, electric service is being maintained. The generating plant in the system remains
ww
synchronized to the transmission network and maintains its existing power output level even without signals
received from control centre.
1. Monitoring:
An energy control centre fulfills the function of coordinating their response of the system elements in
both normal operation and emergency conditions. The burden of repetitious control in normal situations is
delegated to the digital computer and selective monitoring is performed by human operators. The digital
computer is used to process the incoming stream of data to detect abnormalities and then alarm the human
operator via lights, buzzers and CRT presentations. May lower level or less serious cases of exceeding
normal limits are routinely handled by digital computer. A more serious abnormality detected by the digital
computer may cause suspension of normal control functions.
77
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
In emergencies such as loss of a major generator or excess power demands by a neighboring utility o the
tie lines, many alarms could be detected and the system could enter an emergency state.
2. Data Acquisition and Control:
Data acquisition provides operators and computer control systems with status and measurement
information needed to supervise overall operations. Security control analyses the consequences of saults to
establish operating conditions.
Data acquisition and remote control is performed by computer systems called supervisory control and
data acquisition (SCADA) systems. A SCADA system consists of a master station and remote terminal unit
(RTU). Master station communicates information to the RTU for observing and controlling plants. RTUs are
installed at generating station or transmission substation or distribution substation. RTUs transmitting status
of the device and measurements to master station and receive control commands from the master station.
In a computer aided data acquisition scheme, the steady state reading can be acquired simultaneously
from various instrument locations and can be saved for future analysis. The transients may be in the form of
n
voltage or current fluctuations. In a real power system, the transient may result in the failure of components
g.i
and it is sometimes difficult to trace the origin of disturbance. Using a Data Acquisition System, the
transients can be reduced and analyzed.
A typical Energy Control Centre can perform the following functions:
rin
i. Load forecasting: Load should be estimated in advance.
Forecasting Lead time Application
Very short Few minutes to half an eeReal time control, Real time security
term hour. evaluation.
Half an hour to a few Allocation of spinning reserve, Unit
Short term
gin
hours. commitment, maintenance scheduling.
Few days to a few Planning for seasonal peak-winter
Medium term
weeks. summer.
En
Few months to a few To plan the growth of the generation
Long term
years. capacity.
ii. Power system planning:
arn
For generation.
For transmission and distribution.(should aim at excess capacity than load).
iii. Unit Commitment: The constrains are – spinning reserve, minimum up time, minimum down
time, hydro constraints and fuel constraints.
Le
iv. Maintenance scheduling: The planned maintenance outages of the generation equipment over
a given future period.
v. Security monitoring: The on-line process using real time data for analyzing the effects of
w.
outages contingencies on the steady state performance of the system.
vi. State estimation: It is the process of estimating the state. When based on system monitoring
data, it produces best estimates of the power system state.
ww
vii. Economic dispatch: It is to distribute the load among the generating units so as to minimize the
total cost of the system.
Load frequency control: In interconnected systems with 2 or more independently controlled areas, in
addition to control of frequency, generation within each area has to be controlled to maintain scheduled
power interchange.
78
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
79
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
80
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
81
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
82
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
83
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
84
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
85
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
86
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
87
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
88
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
89
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
90
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
91
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
92
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
93
Visit & Downloaded From : www.LearnEngineering.in
Visit & Downloaded From : www.LearnEngineering.in
n
g.i
rin
ee
gin
En
arn
Le
w.
ww
94
Visit & Downloaded From : www.LearnEngineering.in
Вам также может понравиться
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationОт EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationОценок пока нет
- EE2401 POWER SYSTEM OPERATION AND CONTROL Syllabus Regulation 2008Документ2 страницыEE2401 POWER SYSTEM OPERATION AND CONTROL Syllabus Regulation 2008Muruga RajОценок пока нет
- Converter-Based Dynamics and Control of Modern Power SystemsОт EverandConverter-Based Dynamics and Control of Modern Power SystemsРейтинг: 2 из 5 звезд2/5 (1)
- GTU Bachelor Course on Power System OperationДокумент3 страницыGTU Bachelor Course on Power System OperationPratham VaghelaОценок пока нет
- Ee2401 Power System Operation and ControlДокумент2 страницыEe2401 Power System Operation and Controlsshivakumar98Оценок пока нет
- Psoc SyllabusДокумент1 страницаPsoc SyllabusDevi PriyaОценок пока нет
- EE8702 - PSOC Syllabus 2017RДокумент2 страницыEE8702 - PSOC Syllabus 2017RRaja Sekar100% (2)
- EE6002-SCAD-MSM - by EasyEngineering PDFДокумент96 страницEE6002-SCAD-MSM - by EasyEngineering PDFSimbu VishnuОценок пока нет
- Ee2401 Power System Operation and Control L T P CДокумент6 страницEe2401 Power System Operation and Control L T P CMarishaakОценок пока нет
- Gujarat Technological UniversityДокумент3 страницыGujarat Technological UniversityBhavik PrajapatiОценок пока нет
- Powwer System Operation and Control PDFДокумент3 страницыPowwer System Operation and Control PDFmitulОценок пока нет
- Ee6603 Power System Operation and Control L T P C 3 0 0 3Документ1 страницаEe6603 Power System Operation and Control L T P C 3 0 0 3Anbalagan GuruОценок пока нет
- BE EEE VI Sem MergedДокумент12 страницBE EEE VI Sem MergedNatarajan RajaОценок пока нет
- PSOC Lession PlanДокумент7 страницPSOC Lession PlanskdwarakanathОценок пока нет
- EE 2401 Power System Operation and Control PDFДокумент115 страницEE 2401 Power System Operation and Control PDFKvv BapirajuОценок пока нет
- Syllabus UTU EE 7th Sem 2009-10Документ10 страницSyllabus UTU EE 7th Sem 2009-10hmalhotra_13Оценок пока нет
- Academic Regulations & Course Structure for Power Engineering ProgramsДокумент14 страницAcademic Regulations & Course Structure for Power Engineering Programssambana pavankumarОценок пока нет
- Mtech 2sem SyllabusДокумент8 страницMtech 2sem Syllabusrajavgr243Оценок пока нет
- Power System Operation & ControlДокумент73 страницыPower System Operation & ControlDr. Moh DoshanОценок пока нет
- M.Tech Power System PDFДокумент30 страницM.Tech Power System PDFRaja RamachandranОценок пока нет
- Muthayammal Engineering College, RASIPURAM 637408 (Autonomous)Документ205 страницMuthayammal Engineering College, RASIPURAM 637408 (Autonomous)Vishal DesignОценок пока нет
- PDFДокумент3 страницыPDFDaryAntoОценок пока нет
- Download Power System Analysis And Design SolutionДокумент5 страницDownload Power System Analysis And Design Solutionfaridyanuar0% (3)
- IC6501 SCAD MSM by WWW - Learnengineering.inДокумент223 страницыIC6501 SCAD MSM by WWW - Learnengineering.inKarthi BEОценок пока нет
- PSOCДокумент14 страницPSOCSharmilaОценок пока нет
- Sem6 SyllabusДокумент5 страницSem6 SyllabusSamsung TabletОценок пока нет
- 4-2 Syllabus Iv Year Ii Semester S. No. Subject Code Subject Title C L T PДокумент9 страниц4-2 Syllabus Iv Year Ii Semester S. No. Subject Code Subject Title C L T PPandu NaiduОценок пока нет
- Power System 1: CO1 CO2 CO3 CO4 CO5 CO6Документ2 страницыPower System 1: CO1 CO2 CO3 CO4 CO5 CO6Anonymous HyOfbJ6Оценок пока нет
- Nptel: Power Electronic Applications in Power Systems - Web CourseДокумент2 страницыNptel: Power Electronic Applications in Power Systems - Web CourseTiya gonekarОценок пока нет
- Review of Load Frequency Control Methods, Part-I: Introduction and Pre-Deregulation ScenarioДокумент6 страницReview of Load Frequency Control Methods, Part-I: Introduction and Pre-Deregulation ScenarioislammuddinОценок пока нет
- New method for real-time contingency evaluation and ranking of power system stabilityДокумент9 страницNew method for real-time contingency evaluation and ranking of power system stabilitySanthosh Reddy KanthalaОценок пока нет
- EEE 6th Sem SyllabusДокумент6 страницEEE 6th Sem SyllabusRajesh0% (1)
- M.Tech Course Structure and Syllabus for Power EngineeringДокумент14 страницM.Tech Course Structure and Syllabus for Power EngineeringcharinathrОценок пока нет
- EEE F312 Power Systems 2014-15Документ3 страницыEEE F312 Power Systems 2014-15Harsha DuttaОценок пока нет
- IIT Roorkee PG Power Courses ListДокумент61 страницаIIT Roorkee PG Power Courses ListAnkit YadavОценок пока нет
- Syllabus For The Academic Year - 2020 - 2021Документ20 страницSyllabus For The Academic Year - 2020 - 2021Goriparthi SambasievaraavОценок пока нет
- FACTS SyllabusДокумент1 страницаFACTS SyllabusKirubananthan KrishnanОценок пока нет
- VII Sem EX SyllabusДокумент17 страницVII Sem EX SyllabusAbhinav RajОценок пока нет
- EE2036Документ1 страницаEE2036sathishОценок пока нет
- R19M.TECHEPE EPSISemДокумент37 страницR19M.TECHEPE EPSISemParameshwar TummetiОценок пока нет
- Electri Sem 8Документ4 страницыElectri Sem 8Ajeet KumarОценок пока нет
- Mtech PS SyllabusДокумент25 страницMtech PS SyllabusJithendra NathОценок пока нет
- Ee2036 Flexible Ac Transmission Systems L T P CДокумент1 страницаEe2036 Flexible Ac Transmission Systems L T P CVijay KumarОценок пока нет
- Dynamic Security of Interconnected Electric Power Systems - Volume 2: Dynamics and Stability of Conventional and Renewable Energy SystemsДокумент657 страницDynamic Security of Interconnected Electric Power Systems - Volume 2: Dynamics and Stability of Conventional and Renewable Energy SystemsshimymbОценок пока нет
- Aps, PS, Pse, PSC, E&pe, Eps, Psc&a, Psc&ae PDFДокумент16 страницAps, PS, Pse, PSC, E&pe, Eps, Psc&a, Psc&ae PDFKVSR SEKHARОценок пока нет
- Curriculum For MTech in Power Systems ProgrammeДокумент20 страницCurriculum For MTech in Power Systems ProgrammeheerapotterОценок пока нет
- EE8501 Power System Analysis LTPC 3 0 0 3 Unit I Power System 9Документ1 страницаEE8501 Power System Analysis LTPC 3 0 0 3 Unit I Power System 9Vibin NivasОценок пока нет
- M.SL-Power-System-Operation-and-Control - PEC PDFДокумент150 страницM.SL-Power-System-Operation-and-Control - PEC PDFPraveena GopiОценок пока нет
- Ee2036 Flexible Ac Transmission SystemsДокумент2 страницыEe2036 Flexible Ac Transmission SystemsAnbalagan GuruОценок пока нет
- EE6511Документ1 страницаEE6511suprobhatОценок пока нет
- Power System Operation and Control ConceptsДокумент1 страницаPower System Operation and Control ConceptsSaravanan RameshОценок пока нет
- M Tech Electrical Power Systems R15 Syllabus-1Документ23 страницыM Tech Electrical Power Systems R15 Syllabus-1Chaitanya KumarОценок пока нет
- Eee 8th Sem r2008Документ18 страницEee 8th Sem r2008Ashok VannanОценок пока нет
- Manual Pss LDДокумент187 страницManual Pss LDPhanindra Kumar JОценок пока нет
- PSOCДокумент2 страницыPSOCSai Pavan Kumar NandigamОценок пока нет
- Power System Control and AutomationДокумент23 страницыPower System Control and AutomationOM NamashivayaОценок пока нет
- 4 Psoc As Aurora CollegeДокумент56 страниц4 Psoc As Aurora CollegeKvv BapirajuОценок пока нет
- Determination of Emergency Power System Voltage Control ActionsДокумент6 страницDetermination of Emergency Power System Voltage Control ActionsLinda Carolina VasconezОценок пока нет
- Psoc Unit 1Документ10 страницPsoc Unit 1Dhivya B100% (1)
- Restructured Power SystemsДокумент30 страницRestructured Power SystemsDhivya BОценок пока нет
- Power System Operation and Control: Assistant Professor / EEE Rajalakshmi Engineering College Dhivya.b@rajalakshmi - Edu.inДокумент79 страницPower System Operation and Control: Assistant Professor / EEE Rajalakshmi Engineering College Dhivya.b@rajalakshmi - Edu.inDhivya BОценок пока нет
- Overview PsocДокумент4 страницыOverview PsocDhivya BОценок пока нет
- Latha Mathavan Engineering College e-Content ProposalДокумент44 страницыLatha Mathavan Engineering College e-Content ProposalRashmi SharmaОценок пока нет
- Ee2401 Psoc Question BankДокумент15 страницEe2401 Psoc Question BankDhivya BОценок пока нет
- Psoc Textbook by SivanagarajuДокумент925 страницPsoc Textbook by SivanagarajuBhanu BkvОценок пока нет
- EE6603 NotesДокумент85 страницEE6603 NotesDhivya BОценок пока нет
- PSOC PART A & B AnsДокумент94 страницыPSOC PART A & B AnsDhivya BОценок пока нет
- Google Meet links and participant namesДокумент6 страницGoogle Meet links and participant namesDhivya BОценок пока нет
- Electric Energy System Theory An Introduction Olle I ElgerdpdfДокумент291 страницаElectric Energy System Theory An Introduction Olle I ElgerdpdfDhivya BОценок пока нет
- Restructured Power SystemsДокумент30 страницRestructured Power SystemsDhivya BОценок пока нет
- Power System Analysis Operation and Control - Abhijit Chakrabarti - Sunita Halder PDFДокумент531 страницаPower System Analysis Operation and Control - Abhijit Chakrabarti - Sunita Halder PDFBerhanu Zelalem62% (50)
- 3.6-PSOC Optimized PDFДокумент68 страниц3.6-PSOC Optimized PDFN R SHEKARОценок пока нет
- G2V and V2G Electric Vehicle Charger For Smart Grids: Ricardo G. Gago Sónia F. Pinto José F. SilvaДокумент6 страницG2V and V2G Electric Vehicle Charger For Smart Grids: Ricardo G. Gago Sónia F. Pinto José F. Silvapratap68Оценок пока нет
- G2V and V2G Operation 20 KW Battery Charger: Paper Number: 6130341Документ16 страницG2V and V2G Operation 20 KW Battery Charger: Paper Number: 6130341Dhivya BОценок пока нет
- Lec 1Документ17 страницLec 1Dhivya BОценок пока нет
- Communication Modeling of Solar Home System and Smart Meter in Smart GridsДокумент12 страницCommunication Modeling of Solar Home System and Smart Meter in Smart GridsDhivya BОценок пока нет
- Ee6511 Control and Instrumentation Laboratory PDFДокумент73 страницыEe6511 Control and Instrumentation Laboratory PDFDhivya BОценок пока нет
- IitДокумент9 страницIitriteshtiroleОценок пока нет
- Lec2 PDFДокумент16 страницLec2 PDFDhivya BОценок пока нет
- Syed Ammal Engineering College Electrical Machines LabДокумент7 страницSyed Ammal Engineering College Electrical Machines LabDhivya BОценок пока нет
- LM Ee6511 Cil V Eee QB PDFДокумент50 страницLM Ee6511 Cil V Eee QB PDFDhivya BОценок пока нет
- Eept PDFДокумент8 страницEept PDFDhivya BОценок пока нет
- Power System Engineering Second Edition by Nagrath Kothari PDFДокумент839 страницPower System Engineering Second Edition by Nagrath Kothari PDFDhivya BОценок пока нет
- College Student RecordsДокумент23 страницыCollege Student RecordsDhivya BОценок пока нет
- Ug Eee Syllabus (I-Viii)Документ132 страницыUg Eee Syllabus (I-Viii)Dhivya BОценок пока нет
- One Day National Level Workshop ON: "Recent Advancements in Iot"Документ3 страницыOne Day National Level Workshop ON: "Recent Advancements in Iot"Dhivya BОценок пока нет
- An Improved Ant Colony Algorithm and Its ApplicatiДокумент10 страницAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y eОценок пока нет
- Fi 7160Документ2 страницыFi 7160maxis2022Оценок пока нет
- Nysc Editorial ManifestoДокумент2 страницыNysc Editorial ManifestoSolomon Samuel AdetokunboОценок пока нет
- Influence of Social Media on Youth Brand Choice in IndiaДокумент7 страницInfluence of Social Media on Youth Brand Choice in IndiaSukashiny Sandran LeeОценок пока нет
- Trabajo de Investigación FormativaДокумент75 страницTrabajo de Investigación Formativalucio RОценок пока нет
- NRSPДокумент27 страницNRSPMuhammad Farhan67% (3)
- American Woodworker No 171 April-May 2014Документ76 страницAmerican Woodworker No 171 April-May 2014Darius White75% (4)
- Plumbing Arithmetic RefresherДокумент80 страницPlumbing Arithmetic RefresherGigi AguasОценок пока нет
- Beyond B2 English CourseДокумент1 страницаBeyond B2 English Coursecarlitos_coolОценок пока нет
- Fuather, That Smid Govern-: Such Time As It May Deem Proper: TeДокумент18 страницFuather, That Smid Govern-: Such Time As It May Deem Proper: Tencwazzy100% (1)
- Benefits of Eating OkraДокумент4 страницыBenefits of Eating Okraama931Оценок пока нет
- CAM TOOL Solidworks PDFДокумент6 страницCAM TOOL Solidworks PDFHussein ZeinОценок пока нет
- Government of The Punjab Primary & Secondary Healthcare DepartmentДокумент3 страницыGovernment of The Punjab Primary & Secondary Healthcare DepartmentYasir GhafoorОценок пока нет
- Talon Star Trek Mod v0.2Документ4 страницыTalon Star Trek Mod v0.2EdmundBlackadderIVОценок пока нет
- Sceduling and Maintenance MTP ShutdownДокумент18 страницSceduling and Maintenance MTP ShutdownAnonymous yODS5VОценок пока нет
- Location: Connectivity To The MuseumДокумент7 страницLocation: Connectivity To The MuseumAbhishek AjayОценок пока нет
- DJДокумент907 страницDJDeepak BhawsarОценок пока нет
- Outstanding 12m Bus DrivelineДокумент2 страницыOutstanding 12m Bus DrivelineArshad ShaikhОценок пока нет
- Citation GuideДокумент21 страницаCitation Guideapi-229102420Оценок пока нет
- Case Presentation - Bipolar Affective Disorder 2Документ73 страницыCase Presentation - Bipolar Affective Disorder 2Hemant's galaxy All is hereОценок пока нет
- Differentiation: Vehicle Network SolutionsДокумент1 страницаDifferentiation: Vehicle Network SolutionsДрагиша Небитни ТрифуновићОценок пока нет
- Insert BondingДокумент14 страницInsert BondingHelpful HandОценок пока нет
- VISCOSITY CLASSIFICATION GUIDE FOR INDUSTRIAL LUBRICANTSДокумент8 страницVISCOSITY CLASSIFICATION GUIDE FOR INDUSTRIAL LUBRICANTSFrancisco TipanОценок пока нет
- BWT Septron Line 31-61 Rev01!08!05-18 Opm enДокумент56 страницBWT Septron Line 31-61 Rev01!08!05-18 Opm enDavide Grioni100% (1)
- Mercury QCДокумент23 страницыMercury QCMarcus MeyerОценок пока нет
- Self-Learning Module in General Chemistry 1 LessonДокумент9 страницSelf-Learning Module in General Chemistry 1 LessonGhaniella B. JulianОценок пока нет
- Assessment of Benefits and Risk of Genetically ModДокумент29 страницAssessment of Benefits and Risk of Genetically ModSkittlessmannОценок пока нет
- Opamp TIДокумент5 страницOpamp TIAmogh Gajaré100% (1)
- Required Reading For Piano Technicians PDFДокумент28 страницRequired Reading For Piano Technicians PDFNinaОценок пока нет
- Special Proceedings Case DigestДокумент14 страницSpecial Proceedings Case DigestDyan Corpuz-Suresca100% (1)