Вам также может понравиться
- NAME:K.Rakesh REGNO:14BEC0764 Subject:Coa Slot: G1Документ17 страницNAME:K.Rakesh REGNO:14BEC0764 Subject:Coa Slot: G1Rakesh KotaОценок пока нет
- Introduction To Robotics Lecture 1, Section 3: Robots TodayДокумент3 страницыIntroduction To Robotics Lecture 1, Section 3: Robots TodayLuis Alberto Zapata OjedaОценок пока нет
- Opposite Page: Mars Rover. Photo Courtesy of NASA/JPL CaltechДокумент22 страницыOpposite Page: Mars Rover. Photo Courtesy of NASA/JPL CaltechAliyu abubakarОценок пока нет
- Robotics (BS)Документ47 страницRobotics (BS)Anupama YadavОценок пока нет
- Faizan All About Arduino RoboticsДокумент21 страницаFaizan All About Arduino RoboticsJunaid KhanОценок пока нет
- Vision Guided RoboticsДокумент13 страницVision Guided RoboticsVijay ShivakumarОценок пока нет
- How and Why Wonder Book of RobotsДокумент36 страницHow and Why Wonder Book of Robotskett8233100% (4)
- ROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirДокумент7 страницROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirrahulcoolhutОценок пока нет
- Unit - 1 - IntroductionДокумент61 страницаUnit - 1 - IntroductionSatheesh KumarОценок пока нет
- Curso RobotsДокумент31 страницаCurso RobotsLuisitoОценок пока нет
- 3arm Robot Mini FinalДокумент49 страниц3arm Robot Mini FinalWebsoft Tech-HydОценок пока нет
- 2.history of RoboticsДокумент12 страниц2.history of RoboticsSai RamОценок пока нет
- RoboticsДокумент10 страницRoboticsOm ShawОценок пока нет
- Unit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" WashingДокумент27 страницUnit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" Washinglakshmigsr6610Оценок пока нет
- Lec 1 UpdatedДокумент60 страницLec 1 Updatedmuhammad usamaОценок пока нет
- HEXAPODДокумент14 страницHEXAPODAkriti SharmaОценок пока нет
- Project SynopsisДокумент36 страницProject SynopsisgopalysgОценок пока нет
- Lab ManualДокумент9 страницLab ManualSahil KokitkarОценок пока нет
- Intelligent Line Following Robot: What Exactly Is A Robot?Документ6 страницIntelligent Line Following Robot: What Exactly Is A Robot?Selva GanapathyОценок пока нет
- Robotics and Its ApplicationsДокумент36 страницRobotics and Its ApplicationsA dominic100% (2)
- Robotics 11Документ35 страницRobotics 11omarelkabbany005Оценок пока нет
- RoboticsДокумент26 страницRoboticsAyman Ahmed CheemaОценок пока нет
- Introduction To Intelligent Robotics: What Are Intelligent RobotsДокумент11 страницIntroduction To Intelligent Robotics: What Are Intelligent RobotsAarti JangraОценок пока нет
- Robotics TheoryДокумент13 страницRobotics TheorymahrusОценок пока нет
- RoboticsДокумент4 страницыRoboticsNicomhar Agang TubioОценок пока нет
- Robotics: Submitted byДокумент17 страницRobotics: Submitted bySri VijayОценок пока нет
- Johns Hopkins University What Is Engineering? M. KarweitДокумент13 страницJohns Hopkins University What Is Engineering? M. KarweitJaime Escalante VargasОценок пока нет
- Introduction To Robotics: Artificial IntelligenceДокумент32 страницыIntroduction To Robotics: Artificial IntelligenceAtul SharmaОценок пока нет
- Notes On RoboticsДокумент2 страницыNotes On RoboticsAnishka MishraОценок пока нет
- Intro To RoboticsДокумент37 страницIntro To RoboticsDustin BurdickОценок пока нет
- Unit1 Part2Документ29 страницUnit1 Part2Sharmila83Оценок пока нет
- Robotics and Vision SystemДокумент64 страницыRobotics and Vision Systemasuras1234Оценок пока нет
- Robotics Technology Extended Background FinalДокумент28 страницRobotics Technology Extended Background FinalLovely Aurelio QuameОценок пока нет
- Experimental Setup of ProjectДокумент7 страницExperimental Setup of Projectapi-248119294Оценок пока нет
- Mobile Robotics: (Self Study Report)Документ25 страницMobile Robotics: (Self Study Report)deepak_vk13Оценок пока нет
- Rope Climbing Robot 1 StageДокумент41 страницаRope Climbing Robot 1 Stage856- Pandurang DombaleОценок пока нет
- Seminar ReportДокумент31 страницаSeminar ReportPriyaranjan BeheraОценок пока нет
- Robotics: Lecture 1: Introduction To RoboticsДокумент44 страницыRobotics: Lecture 1: Introduction To RoboticsRegino BetongОценок пока нет
- Way-Finding and Mapping Using Robot ROS: Bhavya Sharma, Harshit Singh, Navendu Kumar, Ujjwal Gupta, Md. Saquib FarazДокумент4 страницыWay-Finding and Mapping Using Robot ROS: Bhavya Sharma, Harshit Singh, Navendu Kumar, Ujjwal Gupta, Md. Saquib Farazshivang guptaОценок пока нет
- Lecture 2Документ36 страницLecture 2Wajdi SadiqОценок пока нет
- Robotic NotesДокумент16 страницRobotic Noteskeerthana murugeswaranОценок пока нет
- Introduction To Robotics'Документ12 страницIntroduction To Robotics'rahul bhattОценок пока нет
- Term Paper OF Machanics PHY-101 Subject:-: Industrial RoboticsДокумент15 страницTerm Paper OF Machanics PHY-101 Subject:-: Industrial Roboticsvishwajeet89Оценок пока нет
- Development of Robotic Arm Using Arduino Uno: Priyambada Mishra, Riki Patel, Trushit Upadhyaya, Arpan DesaiДокумент9 страницDevelopment of Robotic Arm Using Arduino Uno: Priyambada Mishra, Riki Patel, Trushit Upadhyaya, Arpan Desaihussien amareОценок пока нет
- Robotics Part 2Документ7 страницRobotics Part 2Lyna Meriem LAZLAOUIОценок пока нет
- 1.1 Industrial RobotsДокумент19 страниц1.1 Industrial RobotsmansiОценок пока нет
- RoboticsДокумент20 страницRoboticsMb Clind100% (2)
- 1.1 Working Principle of and Pick and Place RobotДокумент17 страниц1.1 Working Principle of and Pick and Place RobotHrishikesh PatilОценок пока нет
- Robotics 10 DLLДокумент7 страницRobotics 10 DLLshover solisОценок пока нет
- How Have Robots Changed Manufacturing SectorДокумент11 страницHow Have Robots Changed Manufacturing SectorjackОценок пока нет
- Module 2Документ12 страницModule 2ronin31stОценок пока нет
- Final Report For IndustrialДокумент32 страницыFinal Report For IndustrialJecren Godinez BoocОценок пока нет
- Project Report FinalДокумент69 страницProject Report Finalrohitsaini2383% (6)
- Mechanical Virtual Artificial Agent Electromechanical System Intent AgencyДокумент7 страницMechanical Virtual Artificial Agent Electromechanical System Intent Agencysathya_jbОценок пока нет
- RoboticsДокумент42 страницыRoboticsMarini Pramod KumarОценок пока нет
- University of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshДокумент14 страницUniversity of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshwagoheОценок пока нет
- Prekel - BoschRexroth - Smart Factory Thematic SessionДокумент12 страницPrekel - BoschRexroth - Smart Factory Thematic SessionLuis Alberto Zapata OjedaОценок пока нет
- MIT SBL Booklet2Документ13 страницMIT SBL Booklet2Luis Alberto Zapata OjedaОценок пока нет
- Industrie 4.0 Rexroth Bosch 210317Документ21 страницаIndustrie 4.0 Rexroth Bosch 210317Luis Alberto Zapata OjedaОценок пока нет
- Tegra Linux Driver Package Nano Adaptation GuideДокумент37 страницTegra Linux Driver Package Nano Adaptation GuideLuis Alberto Zapata OjedaОценок пока нет
- INDCERT - mMS4.0 v1.0Документ4 страницыINDCERT - mMS4.0 v1.0Luis Alberto Zapata OjedaОценок пока нет
- BL-M8822CS1-S (VS) Product Specification V1.0 (BT5.0)Документ16 страницBL-M8822CS1-S (VS) Product Specification V1.0 (BT5.0)Luis Alberto Zapata OjedaОценок пока нет
- Tegra Linux Driver Package Release Notes R32.1Документ23 страницыTegra Linux Driver Package Release Notes R32.1Luis Alberto Zapata OjedaОценок пока нет
- Industry 4.0: From Iot To Smart Industry: Regis Cazenave Schneider Electric Korea 인더스트리 사업부 본부장Документ23 страницыIndustry 4.0: From Iot To Smart Industry: Regis Cazenave Schneider Electric Korea 인더스트리 사업부 본부장Luis Alberto Zapata OjedaОценок пока нет
- Re 29106 - 2022-11Документ24 страницыRe 29106 - 2022-11Luis Alberto Zapata OjedaОценок пока нет
- Accelerated GStreamer User GuideДокумент68 страницAccelerated GStreamer User GuideLuis Alberto Zapata OjedaОценок пока нет
- Introduction To Robotics: Lecture 1, Section 5Документ1 страницаIntroduction To Robotics: Lecture 1, Section 5Luis Alberto Zapata OjedaОценок пока нет
- Power Generation Geothermal Energy and Its Possible Application in TheДокумент10 страницPower Generation Geothermal Energy and Its Possible Application in TheLuis Alberto Zapata OjedaОценок пока нет
- Assessment Usage Energetic Potential From Renewable Sources: Aleš Folvarčný/Stanislav Mišák/Tomáš Šumbera/Ladislav SlívaДокумент6 страницAssessment Usage Energetic Potential From Renewable Sources: Aleš Folvarčný/Stanislav Mišák/Tomáš Šumbera/Ladislav SlívaLuis Alberto Zapata OjedaОценок пока нет
- Introduction To Robotics: Lecture 1, Section 2Документ2 страницыIntroduction To Robotics: Lecture 1, Section 2Luis Alberto Zapata OjedaОценок пока нет
- Introduction To Robotics: Lecture 1, Section 1Документ2 страницыIntroduction To Robotics: Lecture 1, Section 1Luis Alberto Zapata OjedaОценок пока нет
- Progress in Making Hot Dry Rock Geothermal Energy A Viable Renewable Energy Resource For America CenturyДокумент5 страницProgress in Making Hot Dry Rock Geothermal Energy A Viable Renewable Energy Resource For America CenturyLuis Alberto Zapata OjedaОценок пока нет
- Mary Dickson and Mario Faneb: Geothermal EnergyДокумент1 страницаMary Dickson and Mario Faneb: Geothermal EnergyLuis Alberto Zapata OjedaОценок пока нет
- El 6752 enДокумент111 страницEl 6752 enLuis Alberto Zapata OjedaОценок пока нет
- 100 Leads in 90 DaysДокумент5 страниц100 Leads in 90 DaysAjay GomesОценок пока нет
- E Authentication System With QR Code and OTPДокумент3 страницыE Authentication System With QR Code and OTPEditor IJTSRDОценок пока нет
- Ethicon Product Catalog Oct 2023Документ106 страницEthicon Product Catalog Oct 2023Addisu WassieОценок пока нет
- Weekly Home Learning Plan: (4 Quarter: Week 1)Документ8 страницWeekly Home Learning Plan: (4 Quarter: Week 1)JenicaEilynОценок пока нет
- OTC Family of Battery Testers: Sabre HPДокумент4 страницыOTC Family of Battery Testers: Sabre HPenticoОценок пока нет
- TEC - OPS - Supra MT - 750-1250 - 62-61921-20 - Rev - ENGДокумент501 страницаTEC - OPS - Supra MT - 750-1250 - 62-61921-20 - Rev - ENGJennyJudithRuizSanchez100% (1)
- Running Head: Workrite Lock-In Project 1Документ10 страницRunning Head: Workrite Lock-In Project 1Caroline WanjaОценок пока нет
- Understanding Security Capability of Information System1Документ6 страницUnderstanding Security Capability of Information System1upadhyay kulbhushanОценок пока нет
- ASHRAE Journal - VAV System Duct Main DesignДокумент5 страницASHRAE Journal - VAV System Duct Main DesignJhoОценок пока нет
- Unlimited Clients by Arnav Srivastv-1Документ170 страницUnlimited Clients by Arnav Srivastv-1Xiang XingОценок пока нет
- Impact Consulting KrauthammerДокумент16 страницImpact Consulting Krauthammerapritul3539Оценок пока нет
- GM Video Door Phone 2020Документ5 страницGM Video Door Phone 2020jup05Оценок пока нет
- Managed IT Services RFP TemplateДокумент11 страницManaged IT Services RFP Templateedpaala67% (3)
- DD 1 2 Practice Ryder CookДокумент3 страницыDD 1 2 Practice Ryder CookJessica IreneОценок пока нет
- SST Postgraduate Induction Timetable and Resources 2023-2Документ12 страницSST Postgraduate Induction Timetable and Resources 2023-2郭天源Оценок пока нет
- Types of Circuit BreakersДокумент23 страницыTypes of Circuit Breakerspmankad60% (5)
- MP 4055/Mp 5055/Mp 6055series / DSM 2640/2650/2660Sp (D287/D288/D289/D293/D294/D295) Parts CatalogДокумент177 страницMP 4055/Mp 5055/Mp 6055series / DSM 2640/2650/2660Sp (D287/D288/D289/D293/D294/D295) Parts CatalogНикитаОценок пока нет
- Association RulesДокумент20 страницAssociation RulesAnik1005Оценок пока нет
- (Model Information) : LCD Color TelevisionДокумент5 страниц(Model Information) : LCD Color TelevisionАртём ДончуковОценок пока нет
- TS Software Operation Instructions Ver1.1Документ58 страницTS Software Operation Instructions Ver1.1Tri MurdaniОценок пока нет
- Information Theory PDFДокумент26 страницInformation Theory PDFljjbОценок пока нет
- API RP 96 - Deepwater Well Design and Construction. Annex C - Inflow Test ExamplesДокумент5 страницAPI RP 96 - Deepwater Well Design and Construction. Annex C - Inflow Test ExamplesjuanОценок пока нет
- Section 20 - Brickwork: Complying With MS 522 and Section DДокумент8 страницSection 20 - Brickwork: Complying With MS 522 and Section DmonОценок пока нет
- Automatic Back-Flushing Filter For Process Technology Autofilt Rf3Документ8 страницAutomatic Back-Flushing Filter For Process Technology Autofilt Rf3Steve OsuohaОценок пока нет
- KSB Centrifugal OverhungДокумент10 страницKSB Centrifugal Overhungঅজানা রশ্মি Ajana rashmiОценок пока нет
- Caterpillar Cs 551 Cs 553 CP 553 Parts ManualДокумент23 страницыCaterpillar Cs 551 Cs 553 CP 553 Parts Manualzugenkzz33% (3)
- Јohn Lakos - Large-Scale C++ Volume I - Process and Architecture (2020, Pearson)Документ1 023 страницыЈohn Lakos - Large-Scale C++ Volume I - Process and Architecture (2020, Pearson)asdasd asdasdОценок пока нет
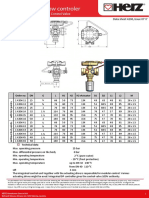
- HERZ-Motorised Flow Controler: Pressure Independant Balancing Control ValveДокумент10 страницHERZ-Motorised Flow Controler: Pressure Independant Balancing Control ValveMahmoud NmiesОценок пока нет
- Accounting Information Systems - Introduction - PPT Video Online DownloadДокумент8 страницAccounting Information Systems - Introduction - PPT Video Online Downloadali alhussainОценок пока нет
- Instruction Manual Safety SystemДокумент99 страницInstruction Manual Safety SystemAndrey AndreyОценок пока нет