Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- GCP-30 Series Genset ControlДокумент169 страницGCP-30 Series Genset ControlIvo TrankolovОценок пока нет
- TDA7294 + Power Transistors AMP (TDA7293 To Come Also) - DiyaudioДокумент6 страницTDA7294 + Power Transistors AMP (TDA7293 To Come Also) - DiyaudioChremataОценок пока нет
- T&D Report - PGCILДокумент43 страницыT&D Report - PGCILdtvishal100% (1)
- HVDCДокумент7 страницHVDCSrinivas Dalli100% (1)
- 22 & 35 Micro ProcessorsДокумент6 страниц22 & 35 Micro ProcessorsSrinivas DalliОценок пока нет
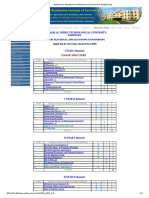
- Jawaharlal Nehru Technological University, Kakinada: Course StructureДокумент3 страницыJawaharlal Nehru Technological University, Kakinada: Course StructureSrinivas DalliОценок пока нет
- PS IiДокумент41 страницаPS IiSrinivas DalliОценок пока нет
- Table ContentsДокумент1 страницаTable ContentsSrinivas DalliОценок пока нет
- Table ContentsДокумент1 страницаTable ContentsSrinivas DalliОценок пока нет
- Table ContentsДокумент1 страницаTable ContentsSrinivas DalliОценок пока нет
- 1308 4675 PDFДокумент10 страниц1308 4675 PDFhuseОценок пока нет
- Corona EffectДокумент4 страницыCorona EffectArturo MartinezОценок пока нет
- References For Advanced Power System StabilityДокумент1 страницаReferences For Advanced Power System StabilitySrinivas DalliОценок пока нет
- IES2013 EEE Objective Paper 1Документ20 страницIES2013 EEE Objective Paper 1Srinivas DalliОценок пока нет
- Adc 1867Документ18 страницAdc 1867Bernick Lincoln Salvador RosasОценок пока нет
- LM2991 Negative Low-Dropout Adjustable Regulator: 1 Features 3 DescriptionДокумент27 страницLM2991 Negative Low-Dropout Adjustable Regulator: 1 Features 3 DescriptionzluiznetoОценок пока нет
- ADC Lab ManualДокумент46 страницADC Lab ManualDinesh Kumar A RОценок пока нет
- ARIA SOHO Installation ManualДокумент66 страницARIA SOHO Installation ManualxelavОценок пока нет
- Pioneer PDR-509 Disk Recorder ManualДокумент40 страницPioneer PDR-509 Disk Recorder ManualStefan LaurentiuОценок пока нет
- Motionmountain Volume3Документ426 страницMotionmountain Volume3Razvan RoscaОценок пока нет
- 1 Pole - Changeover Contact - Faston: 1.1 Interface Relays - PluggableДокумент7 страниц1 Pole - Changeover Contact - Faston: 1.1 Interface Relays - PluggableLikabeus EirlОценок пока нет
- MC3403 Datasheet 4xOV741Документ11 страницMC3403 Datasheet 4xOV741algogeniusОценок пока нет
- Wbfaa 2013 Master Updated Syllabus 082713Документ43 страницыWbfaa 2013 Master Updated Syllabus 082713Ben Gurgen HoffeОценок пока нет
- lv16 2009 Ul Katkaisijat 3vl Osa 5Документ98 страницlv16 2009 Ul Katkaisijat 3vl Osa 5Felix Julio Céspedes SotoОценок пока нет
- Door Lock Control (RHD) : 118 Avanza (Em02Y0E)Документ4 страницыDoor Lock Control (RHD) : 118 Avanza (Em02Y0E)DanielОценок пока нет
- Charge Conservation and The Transcapaci Tance Element: An Expo SitionДокумент4 страницыCharge Conservation and The Transcapaci Tance Element: An Expo SitionnickmmwОценок пока нет
- Controlling an 8x8 LED Matrix with ArduinoДокумент6 страницControlling an 8x8 LED Matrix with ArduinoNafi SiamОценок пока нет
- Modulating Control Valve PN16 With Magnetic Actuat - enДокумент6 страницModulating Control Valve PN16 With Magnetic Actuat - enMouhab HassanОценок пока нет
- Project Presentation - Energy Efficient Car DesignДокумент26 страницProject Presentation - Energy Efficient Car DesignSalar SalahiОценок пока нет
- 120k Active Code 668-2Документ4 страницы120k Active Code 668-2selviantobilmon78Оценок пока нет
- Chapter 1: Introduction To PSoCДокумент47 страницChapter 1: Introduction To PSoCtuandt2_1415100% (2)
- Cubiertas de AilsamientoДокумент45 страницCubiertas de Ailsamientofranklinr68Оценок пока нет
- Tps 65148Документ31 страницаTps 65148Jessica Jhon100% (1)
- Comtech 4514Документ108 страницComtech 4514lordkurОценок пока нет
- Sicam q100 7kg95 SeriesДокумент448 страницSicam q100 7kg95 SeriesToan PhamОценок пока нет
- Be Winter 2020Документ2 страницыBe Winter 2020SonuОценок пока нет
- Daiwa CN-465M VHF SWR & Power MeterДокумент5 страницDaiwa CN-465M VHF SWR & Power MeterEmilio EscalanteОценок пока нет
- Pioneer Pdp-508xg 508xda 508xc SMДокумент153 страницыPioneer Pdp-508xg 508xda 508xc SMdrone001100% (3)
- Barber Colman MaДокумент10 страницBarber Colman MaLuis Carlos GutierrezОценок пока нет
- EEE 203 Energy Conversion ProblemsДокумент20 страницEEE 203 Energy Conversion ProblemsthiagoomОценок пока нет
- 7SG11 Argus 7 Complete Technical ManualДокумент73 страницы7SG11 Argus 7 Complete Technical Manualvivek2159Оценок пока нет