Вам также может понравиться
- Christoffel Symbols - WikipediaДокумент12 страницChristoffel Symbols - WikipediaMarcos SilvaОценок пока нет
- Topics in Finite and Discrete Mathematics - Sheldon M. RossДокумент279 страницTopics in Finite and Discrete Mathematics - Sheldon M. Rossalvarezdiaz_11921176Оценок пока нет
- Triangle Similarity - ProportionДокумент31 страницаTriangle Similarity - ProportionAivee Lea Jassen Awa0% (1)
- HW 5 SolДокумент19 страницHW 5 SolTDLemonNh100% (1)
- Optimal Control (Course Code: 191561620)Документ4 страницыOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneОценок пока нет
- HW 4 SolДокумент21 страницаHW 4 SolmaregbesolaОценок пока нет
- Lecture 6: May 9: 1.1 Simplex AlgorithmДокумент5 страницLecture 6: May 9: 1.1 Simplex AlgorithmHillal TOUATIОценок пока нет
- A X Is An Element of Z X Such That X Z For Each X A. A Maximal Element of A Is A Such That A A A (In Other Words, A Contains No ElementДокумент7 страницA X Is An Element of Z X Such That X Z For Each X A. A Maximal Element of A Is A Such That A A A (In Other Words, A Contains No ElementEDU CIPANAОценок пока нет
- Convex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlДокумент26 страницConvex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlAnonymous N3LpAXОценок пока нет
- Karush-Kuhn-Tucker (KKT) Conditions: Lecture 11: Convex OptimizationДокумент4 страницыKarush-Kuhn-Tucker (KKT) Conditions: Lecture 11: Convex OptimizationaaayoubОценок пока нет
- Theory QuestionsДокумент4 страницыTheory QuestionsNishant BatraОценок пока нет
- A Note On The Asymptotic Stability in The Whole of Non-Autonomous SystemsДокумент8 страницA Note On The Asymptotic Stability in The Whole of Non-Autonomous SystemsprofjnapolesОценок пока нет
- Heat Ex Homo Rad1Документ6 страницHeat Ex Homo Rad1Carlos Andres Theran SuarezОценок пока нет
- EE364a Homework 4 SolutionsДокумент21 страницаEE364a Homework 4 SolutionsSakshi SharmaОценок пока нет
- Parte 9Документ16 страницParte 9Elohim Ortiz CaballeroОценок пока нет
- Analisis FuncionalДокумент18 страницAnalisis Funcionalricky201201Оценок пока нет
- OptimizationДокумент5 страницOptimizationsweetie05Оценок пока нет
- Linear Differential EquationsДокумент7 страницLinear Differential Equationsseqsi boiОценок пока нет
- Matrices A: (T) Depending On A Parameter TДокумент4 страницыMatrices A: (T) Depending On A Parameter TXiaoqin ZhouОценок пока нет
- Linear Complementarity Problems and Their Sources: Z 0, Q+MZ 0, ZДокумент19 страницLinear Complementarity Problems and Their Sources: Z 0, Q+MZ 0, ZSumit RayОценок пока нет
- FinalДокумент5 страницFinalJacmОценок пока нет
- Lecture Notes For Math 524: Chapter 1. Existence and Uniqueness TheoremsДокумент14 страницLecture Notes For Math 524: Chapter 1. Existence and Uniqueness TheoremsOsama Hamed0% (1)
- Stanford Stats 200Документ6 страницStanford Stats 200Jung Yoon SongОценок пока нет
- Optimization PDFДокумент5 страницOptimization PDFHillal TOUATIОценок пока нет
- EE263 Homework 3 SolutionsДокумент16 страницEE263 Homework 3 SolutionsLucky DeltaОценок пока нет
- Nonlinear Control Theory: Introduction To Dynamical SystemsДокумент43 страницыNonlinear Control Theory: Introduction To Dynamical SystemsChernet TugeОценок пока нет
- Solutions To Sample Midterm QuestionsДокумент14 страницSolutions To Sample Midterm QuestionsJung Yoon SongОценок пока нет
- 2017optimalcontrol Solution AprilДокумент4 страницы2017optimalcontrol Solution Aprilenrico.michelatoОценок пока нет
- AirywkbДокумент5 страницAirywkbSant JorgeОценок пока нет
- Advanced Micro I - Lecture 5 Outline: 1 Solving CPДокумент3 страницыAdvanced Micro I - Lecture 5 Outline: 1 Solving CPcindyОценок пока нет
- 1 I M T I I NДокумент2 страницы1 I M T I I NSamuel Alfonzo Gil BarcoОценок пока нет
- HW 1Документ2 страницыHW 1wheretheworldmeetsОценок пока нет
- Discrete (And Continuous) Optimization WI4 131: November - December, A.D. 2004Документ19 страницDiscrete (And Continuous) Optimization WI4 131: November - December, A.D. 2004Anonymous N3LpAXОценок пока нет
- Opt1 16Документ7 страницOpt1 16Venkatesh NagarajuОценок пока нет
- Example of Heat Equation Solved For ExamДокумент3 страницыExample of Heat Equation Solved For ExamAadarsh UpretiОценок пока нет
- Separation of Variables For PDEsДокумент4 страницыSeparation of Variables For PDEsas.musa.ce053815Оценок пока нет
- Math 6338: Real Analysis II Final Exam Due: Friday May 4 2012 at 5:00pmДокумент3 страницыMath 6338: Real Analysis II Final Exam Due: Friday May 4 2012 at 5:00pmFabian MolinaОценок пока нет
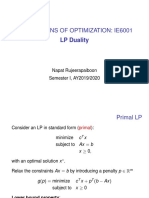
- LP DualityДокумент15 страницLP DualitySteve YeoОценок пока нет
- Handout 6 Partial Differential Equations: Separation of VariablesДокумент2 страницыHandout 6 Partial Differential Equations: Separation of VariablesPaul BenedictОценок пока нет
- HW 2 SolДокумент5 страницHW 2 SoltechutechuОценок пока нет
- Integral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019Документ58 страницIntegral Transforms: Richard Earl (Edited, and Chapter 6 Added, by Sam Howison) Hilary Term 2019EDU CIPANAОценок пока нет
- IMC Simulation: June 15, 2009Документ4 страницыIMC Simulation: June 15, 2009Syaifullah MangantjoОценок пока нет
- Exercise Sheet-1Документ10 страницExercise Sheet-1pauline chauveauОценок пока нет
- Mathematical Programming Examples 1 - SolutionsДокумент4 страницыMathematical Programming Examples 1 - SolutionsNg Chun HiuОценок пока нет
- Solutions For Homework Assignment #2Документ3 страницыSolutions For Homework Assignment #2FerchoAlvearОценок пока нет
- Lecture 2Документ10 страницLecture 2kostas_ntougias5453Оценок пока нет
- Wave Equation 2Документ32 страницыWave Equation 2Yudistira Adi NОценок пока нет
- First-Order Equations: 1.1 The Simplest ExampleДокумент19 страницFirst-Order Equations: 1.1 The Simplest Examplecheenu15Оценок пока нет
- Short Notes On Lyapunov Stability: 1.1 Basic Definitions For Stability and InvarianceДокумент32 страницыShort Notes On Lyapunov Stability: 1.1 Basic Definitions For Stability and InvarianceBhabani sankar KishanОценок пока нет
- Entropy 5Документ9 страницEntropy 5concoursmaths2021Оценок пока нет
- Week1 Diffusion SolutionsДокумент10 страницWeek1 Diffusion SolutionszeliawillscumbergОценок пока нет
- StatisticДокумент5 страницStatisticrahmanabir97Оценок пока нет
- Math 124A - November 22, 2011 Viktor Grigoryan: TT 2 XX T X XДокумент3 страницыMath 124A - November 22, 2011 Viktor Grigoryan: TT 2 XX T X Xarpan mukherjeeОценок пока нет
- 1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Документ8 страниц1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Pushkaraj PanseОценок пока нет
- Heat Eq deДокумент4 страницыHeat Eq deErich AutomatonОценок пока нет
- Karush-Kuhn-Tucker Conditions: Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725Документ26 страницKarush-Kuhn-Tucker Conditions: Geoff Gordon & Ryan Tibshirani Optimization 10-725 / 36-725DalionzoОценок пока нет
- Exponential Dichotomy: Zhisheng Shuai Department of Mathematical and Statistical Sciences University of AlbertaДокумент7 страницExponential Dichotomy: Zhisheng Shuai Department of Mathematical and Statistical Sciences University of AlbertaoxxidОценок пока нет
- Segmentacin de Venas: 1 Fixed-Period Problems: The Sublinear CaseДокумент6 страницSegmentacin de Venas: 1 Fixed-Period Problems: The Sublinear CaseFer AgrazОценок пока нет
- Boyce ResolutionДокумент8 страницBoyce ResolutionLetícia ArthusОценок пока нет
- Hamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Ohreren LehranstaltenДокумент13 страницHamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Ohreren LehranstaltenIon Caciula100% (1)
- M244: Solutions To Final Exam Review: 2 DX DTДокумент15 страницM244: Solutions To Final Exam Review: 2 DX DTheypartygirlОценок пока нет
- Joseph Roussel - Supply ChainДокумент18 страницJoseph Roussel - Supply ChainLEONARD FERNANDO ABELLA LORZAОценок пока нет
- Cash Stankovic Storga EDR 2016 PDFДокумент17 страницCash Stankovic Storga EDR 2016 PDFLEONARD FERNANDO ABELLA LORZA100% (1)
- Yang Yuanqing, Chairman and Ceo, LenovoДокумент3 страницыYang Yuanqing, Chairman and Ceo, LenovoLEONARD FERNANDO ABELLA LORZAОценок пока нет
- Español Música Martes: Eimy Cañas Y Jeison BelloДокумент1 страницаEspañol Música Martes: Eimy Cañas Y Jeison BelloLEONARD FERNANDO ABELLA LORZAОценок пока нет
- Encuentro de Educación Disruptiva (Versión 7)Документ1 страницаEncuentro de Educación Disruptiva (Versión 7)LEONARD FERNANDO ABELLA LORZAОценок пока нет
- Encuentro de Educación Disruptiva (Versión 7)Документ1 страницаEncuentro de Educación Disruptiva (Versión 7)LEONARD FERNANDO ABELLA LORZAОценок пока нет
- Ged 102 Exercise 3 Module 1 1Q 2021-2022Документ3 страницыGed 102 Exercise 3 Module 1 1Q 2021-2022DES MOSОценок пока нет
- Pair of Linear Equations in Two VariablesДокумент2 страницыPair of Linear Equations in Two VariablesTanmay SanchetiОценок пока нет
- Index of PonnusamyДокумент3 страницыIndex of PonnusamyAnkit KambojОценок пока нет
- Example The Surface IntegralДокумент5 страницExample The Surface IntegralsondhaniОценок пока нет
- Systems and Control Theory An Introduction: A. AstolfiДокумент158 страницSystems and Control Theory An Introduction: A. AstolfiAnonymous EeHdJwKeОценок пока нет
- An Innovative Exact Method For Solving Fully Interval Integer Transportation ProblemsДокумент13 страницAn Innovative Exact Method For Solving Fully Interval Integer Transportation ProblemsAnggersetiyaajiОценок пока нет
- PTSP 2 Marks Questions Unit IДокумент2 страницыPTSP 2 Marks Questions Unit IramanaОценок пока нет
- Dehradun Public School ASSIGNMENT 2020-21 Subject-Mathematics (041) Class - XiiДокумент12 страницDehradun Public School ASSIGNMENT 2020-21 Subject-Mathematics (041) Class - XiiSarvesh Kumar SinghОценок пока нет
- Lesson 7.4: Solving Polynomial Equations in Factored FormДокумент15 страницLesson 7.4: Solving Polynomial Equations in Factored FormMadeline RowellОценок пока нет
- The Z-Transform and Its Roc Properties: - ObjectivesДокумент11 страницThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwОценок пока нет
- G8 Math Q1 - Week 5 - Slope of A LineДокумент43 страницыG8 Math Q1 - Week 5 - Slope of A LineWenilyn MananganОценок пока нет
- Basic Trigonometry FormulasДокумент29 страницBasic Trigonometry FormulasNina RicciОценок пока нет
- Laplace TransformДокумент5 страницLaplace TransformjohnОценок пока нет
- Advanced Mathematics Module 3: Systems of Linear Equations: Prepared byДокумент13 страницAdvanced Mathematics Module 3: Systems of Linear Equations: Prepared byJohn Steven LlorcaОценок пока нет
- Unit 4 STДокумент22 страницыUnit 4 STSenorita xdОценок пока нет
- Computer Based Optimization Technique MCA-315Документ7 страницComputer Based Optimization Technique MCA-315shalukprОценок пока нет
- UNIT 4 Aeroelasticity PDFДокумент7 страницUNIT 4 Aeroelasticity PDFRokeshuvarajОценок пока нет
- Maths Mock Test - 5Документ8 страницMaths Mock Test - 5ModeetОценок пока нет
- Maths QP Set-1Документ6 страницMaths QP Set-1Zam NaizamОценок пока нет
- Answer Scheme Quiz 1 Eem 343Документ5 страницAnswer Scheme Quiz 1 Eem 343Nur AfiqahОценок пока нет
- FFT Image ProcessingДокумент116 страницFFT Image ProcessingMarco Shrimpie CoetzerОценок пока нет
- Lesson 1 Functions As ModelsДокумент47 страницLesson 1 Functions As ModelsCarbon CopyОценок пока нет
- RT ExercisesДокумент220 страницRT ExercisesJhonny tОценок пока нет
- PDFДокумент4 страницыPDFAsmaa AbduОценок пока нет
- MECE 211 Text BookДокумент353 страницыMECE 211 Text Bookmutlu_bağdaşОценок пока нет
- Ultimate Strength AnalysisДокумент3 страницыUltimate Strength AnalysisChristian Gadicho QuintanaОценок пока нет
- Multidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)Документ12 страницMultidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)vinod3457Оценок пока нет