Вам также может понравиться
- Vectorworks 2021 Shortcuts: Tool Shortcuts (Modify in Workspace Editor)Документ5 страницVectorworks 2021 Shortcuts: Tool Shortcuts (Modify in Workspace Editor)TimothyОценок пока нет
- VectorWorks 2019 Keyboard ShortcutsДокумент5 страницVectorWorks 2019 Keyboard ShortcutsW. Isaak Construction Inc.100% (1)
- MAE563 - 1D - Beam F2013Документ26 страницMAE563 - 1D - Beam F2013chesspalace2Оценок пока нет
- Vectorworks Keyboard Shortcuts 2009Документ4 страницыVectorworks Keyboard Shortcuts 2009Adrian GardnerОценок пока нет
- VW Keyboard ShortcutsДокумент5 страницVW Keyboard ShortcutsHelder RodriguesОценок пока нет
- General PDFДокумент12 страницGeneral PDFTình Nguyễn VănОценок пока нет
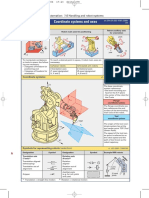
- Mechanical and Metal Trades Handbook 378 enДокумент1 страницаMechanical and Metal Trades Handbook 378 enTrevor SalazarОценок пока нет
- 04 Soft-Margin SVMs 9-46Документ4 страницы04 Soft-Margin SVMs 9-46Sangwoo KimОценок пока нет
- Robot Setup - ABBДокумент24 страницыRobot Setup - ABBTrần Văn TrườngОценок пока нет
- American International University-Bangladesh (AIUB)Документ7 страницAmerican International University-Bangladesh (AIUB)Arif Hossen RimonОценок пока нет
- Linear Classifiers and The Perceptron Algorithm: 36-350, Data Mining, Fall 2009 16 November 2009Документ5 страницLinear Classifiers and The Perceptron Algorithm: 36-350, Data Mining, Fall 2009 16 November 2009machinelearnerОценок пока нет
- Op Amps Positive FeedbackДокумент19 страницOp Amps Positive FeedbackJuan Camilo Guarnizo BermudezОценок пока нет
- Topic 1 - Introduction of DifferentiationДокумент29 страницTopic 1 - Introduction of DifferentiationCHONG XU ZUОценок пока нет
- L93 Notes Semi Conductors N Electronic DevicesДокумент5 страницL93 Notes Semi Conductors N Electronic Devicesdelenaisperfect123Оценок пока нет
- Introduction To RoboticsДокумент32 страницыIntroduction To RoboticsNagarjun SinghОценок пока нет
- Week 6Документ4 страницыWeek 6Mama PigОценок пока нет
- Support Vector Machines (SVM) : N I y X DДокумент5 страницSupport Vector Machines (SVM) : N I y X DPooja PatwariОценок пока нет
- Course Material (Students)Документ46 страницCourse Material (Students)Lamjed AouaniОценок пока нет
- Phy 204 Assignment 2Документ7 страницPhy 204 Assignment 2Nian Ibne NazrulОценок пока нет
- Projectile 1Документ13 страницProjectile 1Alexis Angelo GarciaОценок пока нет
- Class Note 2Документ20 страницClass Note 2Pooja ChughОценок пока нет
- Python Programming Student NotesДокумент10 страницPython Programming Student NotespoonamОценок пока нет
- Maya Keyboard ShortcutsДокумент9 страницMaya Keyboard ShortcutsChris GalordainОценок пока нет
- CAD Sketcher Shortcut Sheet 0.27.0 V1.0Документ1 страницаCAD Sketcher Shortcut Sheet 0.27.0 V1.0000666000Оценок пока нет
- Dynamic Model of Robots: Newton-Euler Approach: Robotics 2Документ16 страницDynamic Model of Robots: Newton-Euler Approach: Robotics 2FaRaz AamIrОценок пока нет
- Analogies in Control SystemДокумент5 страницAnalogies in Control SystemMariaHameedОценок пока нет
- Manipulator Kinematics: Berke GürДокумент32 страницыManipulator Kinematics: Berke GürOmar Seraj Ed-DeenОценок пока нет
- Conception Pick and Place Basic - 4mécat1-Groupe4Документ1 страницаConception Pick and Place Basic - 4mécat1-Groupe4yahya somraniОценок пока нет
- Particle Filter NotesДокумент26 страницParticle Filter NotesPrathyusha MОценок пока нет
- Untitled Notebook Mayed Ibrahim1234321332344Документ2 страницыUntitled Notebook Mayed Ibrahim1234321332344Fatma SharifОценок пока нет
- 4EE Spring 2019 Tutorial 1Документ2 страницы4EE Spring 2019 Tutorial 1ApoorvОценок пока нет
- IR Chapter1Документ21 страницаIR Chapter1wtpqk87nxcОценок пока нет
- UserManual en 1051 1100Документ50 страницUserManual en 1051 1100Dany HsОценок пока нет
- DSA ChecklistДокумент1 страницаDSA Checklistjon higkОценок пока нет
- Blaise Pascal University Aubiere, France Visual Servoing LabsДокумент29 страницBlaise Pascal University Aubiere, France Visual Servoing Labskarim belaliaОценок пока нет
- Lec4 Learning PresentedДокумент101 страницаLec4 Learning PresentedcheintОценок пока нет
- CNC BasicДокумент89 страницCNC BasicSushil ThakkarОценок пока нет
- Advanced Functions LessonsДокумент122 страницыAdvanced Functions Lessonskristenstephens87Оценок пока нет
- BE17805, Jan 3 - 18 12 - 13 - 58 ERRДокумент1 страницаBE17805, Jan 3 - 18 12 - 13 - 58 ERRAkemi LuceroОценок пока нет
- Opertional Amplifiers ReviewДокумент11 страницOpertional Amplifiers ReviewEmre ÖzerОценок пока нет
- Bridge PatternДокумент10 страницBridge PatternumairtahirshahОценок пока нет
- J Published 10 CMMM Admittivity P 07Документ1 страницаJ Published 10 CMMM Admittivity P 07Tushar Kanti BeraОценок пока нет
- Study of An 8-Dof Biped Robot Gait For Single-Supported PhaseДокумент5 страницStudy of An 8-Dof Biped Robot Gait For Single-Supported PhaseOsama FattahОценок пока нет
- Motion in Straight Line 2 Phsics Class NotesДокумент12 страницMotion in Straight Line 2 Phsics Class NotesAtul SanghaviОценок пока нет
- Navier Stokes EquationsДокумент9 страницNavier Stokes EquationsNikhil AgrawalОценок пока нет
- Operaciones Con FraccionesДокумент4 страницыOperaciones Con FraccionesAndrea PrietoОценок пока нет
- Inheritance - Review: Object-Oriented ProgrammingДокумент5 страницInheritance - Review: Object-Oriented Programminglongnhi905Оценок пока нет
- Industrial Training ReportДокумент5 страницIndustrial Training ReportSamrudha JaiswalОценок пока нет
- STABILITY AND STATE SPACE DiagramsДокумент19 страницSTABILITY AND STATE SPACE DiagramsrameshsmeОценок пока нет
- Maths Formula Pocket Book Maths Formula-Page73Документ1 страницаMaths Formula Pocket Book Maths Formula-Page73Ernie LahaylahayОценок пока нет
- Python-Operators CompressedДокумент16 страницPython-Operators Compressedhelp.dataeduxОценок пока нет
- Transformer Manufacturing ProcessesДокумент9 страницTransformer Manufacturing Processesravi474Оценок пока нет
- Pet - Página 60Документ1 страницаPet - Página 60Luis FernandoОценок пока нет
- Das FebruaryДокумент8 страницDas FebruaryKiên Nguyễn TrungОценок пока нет
- Electrical Analogies of Mechanical Systems - TutorialspointДокумент6 страницElectrical Analogies of Mechanical Systems - Tutorialspointsad soulОценок пока нет
- Summary NotesДокумент8 страницSummary NotesVanessa RoseОценок пока нет
- Calc III Summary NotesДокумент8 страницCalc III Summary NotesVanessa RoseОценок пока нет
- Uml 1Документ1 страницаUml 1Suyash Kumar DubeyОценок пока нет
- Colder Catalog 27-30 PMC ConnectorsДокумент4 страницыColder Catalog 27-30 PMC ConnectorsDENNIZОценок пока нет
- WCTE 2018 Conference Paper Stoner FinalVerДокумент7 страницWCTE 2018 Conference Paper Stoner FinalVerMichael StonerОценок пока нет
- 1.5 ForcesДокумент19 страниц1.5 ForceskookiemonsterОценок пока нет
- Atlas Copco Portable Air Compressors: 43 To 69 L/s (70 To 147 Cu - Ft/min) - 7 Bar (102 Psig)Документ6 страницAtlas Copco Portable Air Compressors: 43 To 69 L/s (70 To 147 Cu - Ft/min) - 7 Bar (102 Psig)Thierry Nolla100% (1)
- Ppiug 1983Документ20 страницPpiug 1983Anggi Novi AndriОценок пока нет
- Quantum Field Theory 1 Homework 3Документ4 страницыQuantum Field Theory 1 Homework 3Arjun DeyОценок пока нет
- Lecture 7. HumidificationДокумент29 страницLecture 7. HumidificationNOBLEMAN100% (1)
- Outline Design Specification of Phase IV (March 2019) 01042019 PDFДокумент164 страницыOutline Design Specification of Phase IV (March 2019) 01042019 PDFBilal A BarbhuiyaОценок пока нет
- Demin Tank ReportДокумент69 страницDemin Tank Reportshahroze mustafaОценок пока нет
- Managed Pressure Drilling MPD BrochureДокумент5 страницManaged Pressure Drilling MPD Brochureswaala4realОценок пока нет
- Liquefied Petroleum Gas Cylinder Level Indicator and Transporting DeviceДокумент105 страницLiquefied Petroleum Gas Cylinder Level Indicator and Transporting DeviceAyorinde Oladele Tiwalade100% (1)
- Operation On Low Sulphur FuelsДокумент24 страницыOperation On Low Sulphur FuelsAlejandro Jose Malave RamosОценок пока нет
- GAS KIT Installation GuideДокумент25 страницGAS KIT Installation Guidealrounder57% (7)
- Gate&Ies - Me Postal Course Book CollectionДокумент3 страницыGate&Ies - Me Postal Course Book CollectionJaya Harshit50% (2)
- Design, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorДокумент14 страницDesign, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDavid AzadОценок пока нет
- Physics Problem Solving ExampleДокумент3 страницыPhysics Problem Solving Examplenathaniel borlazaОценок пока нет
- IMIR - 066 - G2 For CS Seamless Pipe 150NB Pipe For Group IIДокумент1 страницаIMIR - 066 - G2 For CS Seamless Pipe 150NB Pipe For Group IIFredin FrancisОценок пока нет
- H. K. Moffatt and Tadashi Tokieda - Celt Reversals: A Prototype of Chiral DynamicsДокумент8 страницH. K. Moffatt and Tadashi Tokieda - Celt Reversals: A Prototype of Chiral DynamicsVortices3443Оценок пока нет
- The Gas Laws: Cortez Vince Robert Linghon QuishaДокумент10 страницThe Gas Laws: Cortez Vince Robert Linghon QuishaZ ACERОценок пока нет
- Metric Outside Diameter Polyethylene (PE) Plastic Pipe (DR-PN)Документ11 страницMetric Outside Diameter Polyethylene (PE) Plastic Pipe (DR-PN)astewayb_964354182Оценок пока нет
- NR 310102 Structural Analysis 1Документ8 страницNR 310102 Structural Analysis 1Srinivasa Rao G100% (1)
- CompressorsДокумент22 страницыCompressorsgoutteОценок пока нет
- Diesel Cycle AnalysisДокумент16 страницDiesel Cycle AnalysisSarah AsgharОценок пока нет
- Unisteels Product RangeДокумент5 страницUnisteels Product Rangesalman KhanОценок пока нет
- How To Solve Blow Molding ProblemsДокумент12 страницHow To Solve Blow Molding ProblemsOmar EstradaОценок пока нет
- SDM Pipe Calculations (US ANSI)Документ38 страницSDM Pipe Calculations (US ANSI)Mohsen AghaeiОценок пока нет
- Saudi Aramco Test Report Pre-Pressure Test Checklist (Form) : SATR-A-2007 22-Jan-18 MechДокумент2 страницыSaudi Aramco Test Report Pre-Pressure Test Checklist (Form) : SATR-A-2007 22-Jan-18 MechaneeshОценок пока нет
- Physics FormulasДокумент108 страницPhysics FormulasArsalan Ahmed Usmani100% (3)
- Stiffness Modifiers For Walls ETABSДокумент3 страницыStiffness Modifiers For Walls ETABSHiren DesaiОценок пока нет
- DesignBuilderPrintableManualv4 5A4Документ1 192 страницыDesignBuilderPrintableManualv4 5A4ElviraMartinez100% (1)