Вам также может понравиться
- Content: SR. NO. Topics Name NO. List of Figure 1. Chapter-1 01Документ50 страницContent: SR. NO. Topics Name NO. List of Figure 1. Chapter-1 01KrazzyBoyОценок пока нет
- A Major Project Report: Bachelor of TechnologyДокумент57 страницA Major Project Report: Bachelor of TechnologyMy StyleОценок пока нет
- Sun Tracking Solar Panel SystemДокумент14 страницSun Tracking Solar Panel SystemBethany LerewanuОценок пока нет
- Thesis 082238FДокумент73 страницыThesis 082238Fsreedhar_vkОценок пока нет
- JahangirThesis Final (27 (1) .04.10)Документ93 страницыJahangirThesis Final (27 (1) .04.10)sabuj22Оценок пока нет
- Microcontroller Based Robotic Arm Control Project ReportДокумент43 страницыMicrocontroller Based Robotic Arm Control Project ReportchiragОценок пока нет
- Iot ProjectДокумент49 страницIot ProjecthiphopharidukehiphopharidukeОценок пока нет
- RP 5Документ34 страницыRP 5Masood AlamОценок пока нет
- Design of Electrical MachinesДокумент183 страницыDesign of Electrical MachinesMadhushree100% (5)
- Automated Grass Cutter-1Документ15 страницAutomated Grass Cutter-1Mwiza LuhangaОценок пока нет
- Solar ReportДокумент46 страницSolar ReportSagar PantОценок пока нет
- Full Project Sem8-Final Report PDFДокумент34 страницыFull Project Sem8-Final Report PDFJeswin EmmanuelОценок пока нет
- Ilovepdf MergedДокумент49 страницIlovepdf MergedLalitha LatchanaОценок пока нет
- Solar Cooler: Mechanical EngineeringДокумент31 страницаSolar Cooler: Mechanical EngineeringParas DobhadaОценок пока нет
- Automated Solar Tracking SystemДокумент24 страницыAutomated Solar Tracking SystemSyed Zulqarnain Ali ShahОценок пока нет
- Design Microstrip Antenna Wireless AppsДокумент55 страницDesign Microstrip Antenna Wireless AppsAli SalehОценок пока нет
- Jahn MarkusДокумент49 страницJahn MarkusJasmineОценок пока нет
- Description Based On AgricultureДокумент53 страницыDescription Based On AgricultureNagaraju GuthikondaОценок пока нет
- Design and Fabrication of a Solar Tracking SystemДокумент56 страницDesign and Fabrication of a Solar Tracking Systemvijay AmirtharajОценок пока нет
- Fyp UpdateДокумент37 страницFyp Updatebasit qureshiОценок пока нет
- Mediciones DVD'sДокумент107 страницMediciones DVD'sdeimos1Оценок пока нет
- DK1410SI DK1440SI DK1470SI DK1480SI: Service ManualДокумент128 страницDK1410SI DK1440SI DK1470SI DK1480SI: Service ManualCristina NistorОценок пока нет
- Cost-Effective Solar Cooler Design and AnalysisДокумент47 страницCost-Effective Solar Cooler Design and AnalysisMD SHALU RAHAMANОценок пока нет
- Fundamentals of Automation TechnologyДокумент1 страницаFundamentals of Automation TechnologyCésar GarcíaОценок пока нет
- Women's Safety BandДокумент49 страницWomen's Safety BandperumalОценок пока нет
- Design of Direct Driven Permanent Magnet GeneratorДокумент134 страницыDesign of Direct Driven Permanent Magnet GeneratorturcanОценок пока нет
- HendershotДокумент13 страницHendershotanbarasuval84Оценок пока нет
- Final 3Документ10 страницFinal 3Om BankarОценок пока нет
- Numerical Relay - Final Report - Winston NettoДокумент90 страницNumerical Relay - Final Report - Winston Nettowinnetto100% (2)
- Automatic Spot Welding MachineДокумент65 страницAutomatic Spot Welding MachineBaranishankarОценок пока нет
- Automatic Brake Failure Detection and Emergency Braking SystemДокумент66 страницAutomatic Brake Failure Detection and Emergency Braking Systemrohith kuruvaОценок пока нет
- Contain 8th SemДокумент12 страницContain 8th SemUmesh SoniОценок пока нет
- BLDC pumpДокумент53 страницыBLDC pumpsakthi velОценок пока нет
- Over Speed Indication and Accident Avoiding System Project ReportДокумент41 страницаOver Speed Indication and Accident Avoiding System Project ReportRushabh Rajendra YerunkarОценок пока нет
- Design of an LED Display Using Solar EnergyДокумент73 страницыDesign of an LED Display Using Solar EnergyAnuja VaishnavОценок пока нет
- Project Report: Submitted in The Partial Fulfillment of The Requirement For The Award DegreeДокумент37 страницProject Report: Submitted in The Partial Fulfillment of The Requirement For The Award DegreeAshok KumarОценок пока нет
- Index SR No Name of Topic NoДокумент2 страницыIndex SR No Name of Topic NolokeshjawaleОценок пока нет
- Arpit Mishra Project WorkДокумент62 страницыArpit Mishra Project WorkarpitОценок пока нет
- On Regenerative Braking For BicyclesДокумент42 страницыOn Regenerative Braking For BicyclesAkash VermaОценок пока нет
- Thesis Outline - MEANSOPHEAKMONYДокумент6 страницThesis Outline - MEANSOPHEAKMONYSor bun SongОценок пока нет
- QSMicrohydroSEP2005 PDFДокумент57 страницQSMicrohydroSEP2005 PDFSasank0% (1)
- Fig. 10.2 Types of ControllersДокумент30 страницFig. 10.2 Types of Controllerssum8c88Оценок пока нет
- 4 Table of Contents-3Документ4 страницы4 Table of Contents-3Rk GargОценок пока нет
- Solar Based Automatic Grass Cutting MachineДокумент8 страницSolar Based Automatic Grass Cutting MachineVj Vicky'sОценок пока нет
- Automatic Solar Teaching SystemДокумент49 страницAutomatic Solar Teaching SystemJashwanth ReddyОценок пока нет
- IndexДокумент9 страницIndexprinceofnation_21Оценок пока нет
- Communication Antenna Switching System Based On Micro ControllerДокумент9 страницCommunication Antenna Switching System Based On Micro ControllerLalit KumarОценок пока нет
- Microcontroller-Based LPG Leakage DetectionДокумент61 страницаMicrocontroller-Based LPG Leakage Detectionamandeep kaurОценок пока нет
- SuperconductingДокумент165 страницSuperconductinghemanth727Оценок пока нет
- 155 Documentation Edt FINALДокумент96 страниц155 Documentation Edt FINALBittu Goswami0% (1)
- Performance Monitoring of Servostabilizer's Transformer and Soft Starting Using Es PDFДокумент83 страницыPerformance Monitoring of Servostabilizer's Transformer and Soft Starting Using Es PDFSuryaMoorthyОценок пока нет
- Road Power Generator AUДокумент26 страницRoad Power Generator AUSelvam SelvamОценок пока нет
- Rfic & Mmic-0Документ12 страницRfic & Mmic-0PhilippeaОценок пока нет
- Project Report - Docx 11111Документ46 страницProject Report - Docx 11111Narayan SutharОценок пока нет
- An Improved Method For Protection of Induction Motor Using MicrocontrollerДокумент64 страницыAn Improved Method For Protection of Induction Motor Using Microcontrollerwondi BETОценок пока нет
- Vaibhavi's Seminar ReportДокумент28 страницVaibhavi's Seminar ReportVaibhavi KocheОценок пока нет
- 1.4 Design Method ConsiderationsДокумент43 страницы1.4 Design Method ConsiderationsAbhíñåv PrâjãpätîОценок пока нет
- Index Chapter No. Name of Chapter Page No.: Advantages, Disadvantages & ApplicationsДокумент2 страницыIndex Chapter No. Name of Chapter Page No.: Advantages, Disadvantages & ApplicationsKPCYP COHODОценок пока нет
- Practical Power System and Protective Relays CommissioningОт EverandPractical Power System and Protective Relays CommissioningРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Front 11Документ1 страницаFront 11ritesh chauhanОценок пока нет
- Front 11Документ1 страницаFront 11ritesh chauhanОценок пока нет
- Chandra Sheikhar Senior Secondary Public School: Project File On Mathematics Topic: Algebra Sub Topic: MatrixДокумент12 страницChandra Sheikhar Senior Secondary Public School: Project File On Mathematics Topic: Algebra Sub Topic: Matrixritesh chauhanОценок пока нет
- Major Project Report: "Emergency Light Using SCR"Документ5 страницMajor Project Report: "Emergency Light Using SCR"ritesh chauhanОценок пока нет
- Emergency Light FinalДокумент35 страницEmergency Light Finalritesh chauhanОценок пока нет
- Project Report: "CNC Machine"Документ4 страницыProject Report: "CNC Machine"ritesh chauhanОценок пока нет
- Automatic Water Level ControllerДокумент40 страницAutomatic Water Level Controllerritesh chauhanОценок пока нет
- Major Project Report: "Emergency Light Using SCR"Документ4 страницыMajor Project Report: "Emergency Light Using SCR"ritesh chauhanОценок пока нет
- Emergency Light FinalДокумент35 страницEmergency Light Finalritesh chauhanОценок пока нет
- Major Project Report: "Automatic Water Level Controller"Документ4 страницыMajor Project Report: "Automatic Water Level Controller"ritesh chauhanОценок пока нет
- Major Project Report: "Automatic Water Level Controller"Документ5 страницMajor Project Report: "Automatic Water Level Controller"ritesh chauhanОценок пока нет
- Ramkalyan Meena Political ScienceДокумент544 страницыRamkalyan Meena Political Scienceritesh chauhanОценок пока нет
- Fire AlarmДокумент43 страницыFire Alarmritesh chauhanОценок пока нет
- Print Front Water Level OmДокумент4 страницыPrint Front Water Level Omritesh chauhanОценок пока нет
- Automatic Water Level ControllerДокумент40 страницAutomatic Water Level Controllerritesh chauhanОценок пока нет
- Major Project Report: Traffic Light Control System Using Microcontroller & Wiring, Estimating and Costing of Machine LabДокумент8 страницMajor Project Report: Traffic Light Control System Using Microcontroller & Wiring, Estimating and Costing of Machine Labritesh chauhanОценок пока нет
- Front Pages Om Emergency LightДокумент5 страницFront Pages Om Emergency Lightritesh chauhanОценок пока нет
- Major Project Report: "Automatic Water Level Controller"Документ5 страницMajor Project Report: "Automatic Water Level Controller"ritesh chauhanОценок пока нет
- Project Report Format EEEДокумент8 страницProject Report Format EEEVasu ThakurОценок пока нет
- Fire AlarmДокумент43 страницыFire Alarmritesh chauhanОценок пока нет
- Major Project Report on Electrical EngineeringДокумент2 страницыMajor Project Report on Electrical Engineeringritesh chauhanОценок пока нет
- Fire AlarmДокумент43 страницыFire Alarmritesh chauhanОценок пока нет
- Traffic LightДокумент12 страницTraffic Lightritesh chauhanОценок пока нет
- Resume: Vasu Thakur Addresss For CorrespondenceДокумент2 страницыResume: Vasu Thakur Addresss For Correspondenceritesh chauhanОценок пока нет
- A Project Report On Emergency LightДокумент1 страницаA Project Report On Emergency LightVasu ThakurОценок пока нет
- "Dc/Ac 500 Watt Inverter Using Dual Mosfet": Polytechnic IN Electrical EngineeringДокумент26 страниц"Dc/Ac 500 Watt Inverter Using Dual Mosfet": Polytechnic IN Electrical EngineeringVasu Thakur100% (1)
- Project Reportwater FrontДокумент1 страницаProject Reportwater Frontritesh chauhanОценок пока нет
- Diploma: A Project Report OnДокумент3 страницыDiploma: A Project Report OnVasu ThakurОценок пока нет
- Certificate: This Is To Certify That The Student ANKUR From GOVT. POLYTECHNICДокумент9 страницCertificate: This Is To Certify That The Student ANKUR From GOVT. POLYTECHNICVasu ThakurОценок пока нет
- Traffic Light Control Project ReportДокумент35 страницTraffic Light Control Project Reportritesh chauhanОценок пока нет
- PCB Designing: by Bhanu Pratap Sharma 11470102810 E.C.E-BДокумент16 страницPCB Designing: by Bhanu Pratap Sharma 11470102810 E.C.E-Bengshimaa100% (1)
- Introduction To Power System ProtectionДокумент33 страницыIntroduction To Power System ProtectionputrasejahtraОценок пока нет
- Editable Computer Network ManualДокумент168 страницEditable Computer Network ManualPRABHAKAR MOREОценок пока нет
- DC motor voltage, current and power calculationsДокумент10 страницDC motor voltage, current and power calculationsJohn Miko JavierОценок пока нет
- CM Surgical Lamp PPДокумент13 страницCM Surgical Lamp PPHyacinthe KOSSIОценок пока нет
- SG6800HV-MV Empowers Utility-Scale SolarДокумент6 страницSG6800HV-MV Empowers Utility-Scale SolarDimitar DimitrovОценок пока нет
- Digital Battery ChargerДокумент6 страницDigital Battery ChargerarmadityaОценок пока нет
- Single and three phase circuit power factor calculationsДокумент4 страницыSingle and three phase circuit power factor calculationsgsatyasrikanth100% (2)
- FischerДокумент1 страницаFischerJericho Morales0% (1)
- EON Grid Code High and Extra High VoltageДокумент46 страницEON Grid Code High and Extra High Voltagemilad rouhiniaОценок пока нет
- Crompton DC MotorsДокумент6 страницCrompton DC MotorsAzed-dine BoughmarОценок пока нет
- ESAD Data Sheet 38999 Det Output 5jun2017Документ1 страницаESAD Data Sheet 38999 Det Output 5jun2017Nasr PooyaОценок пока нет
- Datasheet BM14GДокумент1 страницаDatasheet BM14GShahryarОценок пока нет
- CEA201 ôn tậpДокумент66 страницCEA201 ôn tậpPhan Nhat Tan (K16HCM)Оценок пока нет
- Hager Guide To Junction Boxes PDFДокумент16 страницHager Guide To Junction Boxes PDFTTaanОценок пока нет
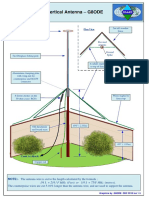
- 20m Elevated Vertical Antenna DesignДокумент5 страниц20m Elevated Vertical Antenna Designleonardo_manzanoОценок пока нет
- Wireless Automation - ABBДокумент16 страницWireless Automation - ABBajit_ahuja1737Оценок пока нет
- AutomationДокумент32 страницыAutomationsjsujiprasadОценок пока нет
- Download-Guide To Install PDFДокумент40 страницDownload-Guide To Install PDFTran Cong HauОценок пока нет
- LM2931 Series Low Dropout Regulators: General DescriptionДокумент18 страницLM2931 Series Low Dropout Regulators: General DescriptionRichard MachadoОценок пока нет
- Power and RMS Values of Fourier SeriesДокумент9 страницPower and RMS Values of Fourier Seriesahmetebeninami75% (4)
- Diagram PLTA SLJДокумент4 страницыDiagram PLTA SLJMEi Cuiet Luph-LuPhОценок пока нет
- Fundamentals of Lightning Protection Systems R1Документ15 страницFundamentals of Lightning Protection Systems R1Gerald KissОценок пока нет
- Esybox Max in SienaДокумент2 страницыEsybox Max in SienaBenRyoОценок пока нет
- Working and Applications of ESC-Electronic Speed ControlДокумент11 страницWorking and Applications of ESC-Electronic Speed ControlNavin KhatriОценок пока нет
- BuzzerДокумент3 страницыBuzzerSHREEОценок пока нет
- Kipor 2012 1416314028 23 e PDFДокумент44 страницыKipor 2012 1416314028 23 e PDFnurahОценок пока нет
- Clear-Com IF4W4 ManualДокумент20 страницClear-Com IF4W4 ManualenricoprgОценок пока нет
- MUX DEMUX Encoder Verilog HDL ModelingДокумент26 страницMUX DEMUX Encoder Verilog HDL ModelingJunaid ahmedОценок пока нет
- KN100GB0311Документ56 страницKN100GB0311Panu Mark IIОценок пока нет