Вам также может понравиться
- Proyecto Modular MatematicasДокумент5 страницProyecto Modular MatematicasCarlos Eduardo Garcia TreviñoОценок пока нет
- Recomendaciones Libros 1er Ciclo (FIEE 2021-2)Документ49 страницRecomendaciones Libros 1er Ciclo (FIEE 2021-2)Alexis Javier Toro100% (1)
- Guia de Operatoria Con FraccionesДокумент12 страницGuia de Operatoria Con FraccionesMarjorie Alejandra FloresОценок пока нет
- MCVV2 U2 A2 JuhlДокумент4 страницыMCVV2 U2 A2 JuhlOlivia Hernandez0% (1)
- Curvas en RNДокумент0 страницCurvas en RNtomi94Оценок пока нет
- Investigacion DoumentalДокумент23 страницыInvestigacion DoumentalElton ObandoОценок пока нет
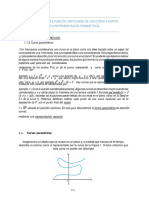
- Obtención de La Ecuación Cartesiana de Una Curva A Partir de Su Representacion ParamétricaДокумент17 страницObtención de La Ecuación Cartesiana de Una Curva A Partir de Su Representacion ParamétricaRosa M. Horna Vargas50% (2)
- Integrales de LineaДокумент18 страницIntegrales de LineaNicolas MayorcaОценок пока нет
- Integrales Curvilineas o de LineaДокумент39 страницIntegrales Curvilineas o de LineaElmer Acero ZapanaОценок пока нет
- Guia de Int de Linea 01Документ23 страницыGuia de Int de Linea 01dinky10Оценок пока нет
- Ay 3 SOL1Документ8 страницAy 3 SOL1wiryarc4Оценок пока нет
- Lectura Fundamental 7Документ17 страницLectura Fundamental 7jhon jairo marinez rojasОценок пока нет
- ChirinosДокумент6 страницChirinosRoy AnthОценок пока нет
- Actividad Integral de LineaДокумент8 страницActividad Integral de LineaIsaac Méndez MéndezОценок пока нет
- Funciones Vectoriales - Definición - Curvas ParametrizadasДокумент4 страницыFunciones Vectoriales - Definición - Curvas ParametrizadasMelvin LedezmaОценок пока нет
- Análisis Matemático II-1Документ16 страницAnálisis Matemático II-1Avril Bolondi MedinaОценок пока нет
- 01 PD (Eeaa) PDFДокумент18 страниц01 PD (Eeaa) PDFBrenda BogarinОценок пока нет
- Resumen Analisis MatematicoДокумент7 страницResumen Analisis MatematicoMalena UrraОценок пока нет
- Taller 08 (Clases 14-15)Документ2 страницыTaller 08 (Clases 14-15)JULIANA ANDREA NIETO CARDONAОценок пока нет
- Clase 4Документ18 страницClase 4Ricardo Molina BeltránОценок пока нет
- Taller 09Документ2 страницыTaller 09dragonshyruОценок пока нет
- Lec 052 LineasДокумент8 страницLec 052 LineasPaulaОценок пока нет
- CV-integrales de LineaДокумент11 страницCV-integrales de LineaPablo AlfanoОценок пока нет
- 4.3. Derivadas de Ecuaciones Paramétricas e Implícitas - Derivadas Sucesivas - DiferencialesДокумент30 страниц4.3. Derivadas de Ecuaciones Paramétricas e Implícitas - Derivadas Sucesivas - DiferencialesTatiana Martinez100% (1)
- Curvas ParamétricasДокумент4 страницыCurvas ParamétricasJuan Castro FrancoОценок пока нет
- Ape 4Документ1 страницаApe 4SAUL BOLIVAR SARMIENTO CARCHIОценок пока нет
- Ape 4Документ1 страницаApe 4Saúl SarmientoОценок пока нет
- Integrales de Linea y Teorema de GreenДокумент19 страницIntegrales de Linea y Teorema de GreenJosé A. Vallejo RodríguezОценок пока нет
- 12 La Integral de LineaДокумент20 страниц12 La Integral de Lineajunior alidОценок пока нет
- TP1 Con EnlacesДокумент7 страницTP1 Con EnlacesVanesa MendezОценок пока нет
- Cal Vectc1Документ12 страницCal Vectc1Alejandro VazquezОценок пока нет
- Clase 3 - Integrales LinealesДокумент13 страницClase 3 - Integrales LinealesrichardferОценок пока нет
- GUIA DE TRABAJO 3 Integrales de LineaДокумент5 страницGUIA DE TRABAJO 3 Integrales de LineaJose DasseОценок пока нет
- Curvas PlanasДокумент11 страницCurvas PlanasRamirez Olvera Christian EduardoОценок пока нет
- Clase 5 MATEIIIДокумент18 страницClase 5 MATEIIIYuli cupitan poloОценок пока нет
- Funciones VectorialesДокумент9 страницFunciones VectorialesFATIMA YAIDALY TUZ POOTОценок пока нет
- Ejercicios-2.5 Aplicaciones Al Cálculo IntegralДокумент4 страницыEjercicios-2.5 Aplicaciones Al Cálculo Integralfmm124Оценок пока нет
- Ecuaciones Parametricas Curvas Planas LGДокумент19 страницEcuaciones Parametricas Curvas Planas LGedisonОценок пока нет
- ProyectoДокумент39 страницProyectoCristhian Eduardo Canario FerrelОценок пока нет
- Teorema de StokeДокумент12 страницTeorema de StokeJared Garcia SandriaОценок пока нет
- 2020 Clase2Документ9 страниц2020 Clase2Francisco NavarroОценок пока нет
- Integrales de LineaДокумент11 страницIntegrales de LineaJosé Rafael Vela FernandezОценок пока нет
- Calculo Vectorial Unidad 3,4 y 5.Документ60 страницCalculo Vectorial Unidad 3,4 y 5.haniaestafania100% (3)
- 7) Campos Vectoriales e Integrales de LíneaДокумент26 страниц7) Campos Vectoriales e Integrales de LíneaJana Vecchio RomeroОценок пока нет
- Ecuacionesparametricas ImplicitasДокумент23 страницыEcuacionesparametricas ImplicitasborjanunezasensioОценок пока нет
- Yvsolerp - 25 Clase Beamer (22 Feb)Документ8 страницYvsolerp - 25 Clase Beamer (22 Feb)Sneyder VasquezОценок пока нет
- Trabajo de VectorialДокумент16 страницTrabajo de VectorialYilda Suero TejadaОценок пока нет
- Enero 2016Документ2 страницыEnero 2016845675 845675Оценок пока нет
- Proyecto Cálculo 3 Integrales de LíneaДокумент45 страницProyecto Cálculo 3 Integrales de LíneaMax Jhonatan Bazán RodríguezОценок пока нет
- Funciones VectorialesДокумент11 страницFunciones VectorialesChristian JesusОценок пока нет
- Notas Calculo III PDFДокумент13 страницNotas Calculo III PDFIsaac Hasse ArmengolОценок пока нет
- PR4 IntegralLinea Matlab PDFДокумент5 страницPR4 IntegralLinea Matlab PDFJosé Leonardo Fernández BalderaОценок пока нет
- Curvas Parametricas y Funciones Parametricas de Un ParametroДокумент20 страницCurvas Parametricas y Funciones Parametricas de Un ParametroIvanОценок пока нет
- Parametrizacion PDFДокумент30 страницParametrizacion PDFValentina EspinozaОценок пока нет
- 1.-Funciones Vectoriales PDFДокумент30 страниц1.-Funciones Vectoriales PDFCésar MarinОценок пока нет
- Clase 18. Integrales de Línea de Campos EscalaresДокумент4 страницыClase 18. Integrales de Línea de Campos EscalaresJuanpablo bolañosОценок пока нет
- Capitulo 3 (Calculo Vectorial)Документ18 страницCapitulo 3 (Calculo Vectorial)Samuel Soto ContrerasОценок пока нет
- PEC 16 SolucionДокумент6 страницPEC 16 SolucionEsther León JorgeОценок пока нет
- Campo VectorialДокумент8 страницCampo Vectorialluislegonzal260486Оценок пока нет
- Boletin 6Документ18 страницBoletin 6eliseoОценок пока нет
- TractizДокумент9 страницTractizRicardo Daniel Contreras ArredondoОценок пока нет
- Integrales de LineaДокумент26 страницIntegrales de Lineasofiaq07Оценок пока нет
- Carta PDFДокумент1 страницаCarta PDFElton ObandoОценок пока нет
- Recomendaciones para DeshidratarДокумент1 страницаRecomendaciones para DeshidratarElton ObandoОценок пока нет
- Economia AnexarДокумент6 страницEconomia AnexarElton ObandoОценок пока нет
- Investigacion de EconomiaДокумент19 страницInvestigacion de EconomiaElton ObandoОценок пока нет
- Documental Economia Sector Termelectrico de Nicaragua CENSAДокумент22 страницыDocumental Economia Sector Termelectrico de Nicaragua CENSAElton ObandoОценок пока нет
- Dinamica RotacionalДокумент7 страницDinamica RotacionalElton ObandoОценок пока нет
- ElectroquimicaДокумент3 страницыElectroquimicaElton Obando50% (2)
- Ejercicios Resueltos Angulos en Posicion NormalДокумент8 страницEjercicios Resueltos Angulos en Posicion NormalMaharba Adnorig78% (9)
- Multiplicación de Potencias de Igual BaseДокумент4 страницыMultiplicación de Potencias de Igual BaseLuis Enrique Conde Palomino50% (2)
- Guia de Trabajo 1 Aritmética 7ºДокумент13 страницGuia de Trabajo 1 Aritmética 7ºCarlos PerezОценок пока нет
- Seminario de Aritmética 2 - 16.03.05Документ2 страницыSeminario de Aritmética 2 - 16.03.05David Alva Alba0% (1)
- Examen U1-RepresentacionesДокумент4 страницыExamen U1-RepresentacionesMalú EspinozaОценок пока нет
- Tema6 CONSIDERACIONES EN LA ENSEÑANZA-APRENDIZAJE DEL ÁLGEBRAДокумент22 страницыTema6 CONSIDERACIONES EN LA ENSEÑANZA-APRENDIZAJE DEL ÁLGEBRASantiago CabezasОценок пока нет
- 1-Funciones Trigonométricas Reales Ejercicios Resueltos PDFДокумент28 страниц1-Funciones Trigonométricas Reales Ejercicios Resueltos PDFRuben MejiaОценок пока нет
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO2) PDFДокумент15 страницEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO2) PDFRICARDO DUQUE LОценок пока нет
- Gradiente de Una FuncionДокумент16 страницGradiente de Una FuncionANDY GONZALO CHOTA GRANDEZОценок пока нет
- MonomiosДокумент4 страницыMonomiosdinora ferminОценок пока нет
- Informacion y TemarioДокумент3 страницыInformacion y TemariothaliaОценок пока нет
- Integrales Por Sustitución y Partes.Документ4 страницыIntegrales Por Sustitución y Partes.Paula GutierrezОценок пока нет
- Unidad 2 Sistemas Ecuaciones LinealesДокумент10 страницUnidad 2 Sistemas Ecuaciones LinealesCésar Augusto González RamírezОценок пока нет
- Curso Intensivo Cálculo Cematiks NuevosxxxДокумент51 страницаCurso Intensivo Cálculo Cematiks Nuevosxxxelizabeth noyolaОценок пока нет
- Funcion PolyfitДокумент4 страницыFuncion PolyfitAngel PaguayОценок пока нет
- Taller 1 Control LLДокумент6 страницTaller 1 Control LLCARLOS ALBERTO BAICUEОценок пока нет
- Descomposicion LUДокумент27 страницDescomposicion LURocky ABОценок пока нет
- 2-Sistemas de Los Números RealesДокумент21 страница2-Sistemas de Los Números RealesCarlos BenitezОценок пока нет
- Tercera Semana Matematicas 6° MarzoДокумент6 страницTercera Semana Matematicas 6° MarzoJessica Dayanny Castro SalazarОценок пока нет
- Tercer AñoДокумент19 страницTercer AñoEugenia EspinozaОценок пока нет
- Examenes Resueltos de Matematicas de Selectividad de Ciencias y Tecnología, Aragón. MasMates. Matemáticas de SecundariaДокумент1 страницаExamenes Resueltos de Matematicas de Selectividad de Ciencias y Tecnología, Aragón. MasMates. Matemáticas de SecundariaSebastian andres Argote gonzaLezОценок пока нет
- HT Vectores en R3Документ3 страницыHT Vectores en R3Jose Luis Llovera ChunquiОценок пока нет
- Calcula DoraДокумент17 страницCalcula DoraCasey BrownОценок пока нет
- Problemas Geometria DificilesДокумент6 страницProblemas Geometria DificileslicaunzОценок пока нет
- Finales Resueltos de AlgebraДокумент42 страницыFinales Resueltos de AlgebraIan DenhamОценок пока нет
- Descargar Factorización Álgebra Segundo de SecundariaДокумент13 страницDescargar Factorización Álgebra Segundo de SecundariaLucho H. G.0% (1)
- AlgebraLineal - Daniela Fernandez - Letra BДокумент11 страницAlgebraLineal - Daniela Fernandez - Letra BdanielaОценок пока нет