Вам также может понравиться
- Implementing A Secure Digital Card With A ZNEO MicrocontrollerДокумент39 страницImplementing A Secure Digital Card With A ZNEO MicrocontrollerJune Anthony AsistioОценок пока нет
- TUP LOGIC CIRCUITS LAB REPORTДокумент2 страницыTUP LOGIC CIRCUITS LAB REPORTJune Anthony AsistioОценок пока нет
- ProgrammingGroundUp 1 0 LettersizeДокумент248 страницProgrammingGroundUp 1 0 LettersizeSarah GuestОценок пока нет
- CS Form No. 212 Personal Data Sheet RevisedДокумент4 страницыCS Form No. 212 Personal Data Sheet RevisedJean Castro76% (106)
- CIP Hybrid Power Starter Kit User's GuideДокумент61 страницаCIP Hybrid Power Starter Kit User's GuideJune Anthony AsistioОценок пока нет
- GW1N-1 PinoutДокумент14 страницGW1N-1 PinoutJune Anthony AsistioОценок пока нет
- Programming With PythonДокумент78 страницProgramming With PythonChris IosifidisОценок пока нет
- Technological University of The Philippines: Basic Electronics LabДокумент2 страницыTechnological University of The Philippines: Basic Electronics LabJune Anthony AsistioОценок пока нет
- GW1N-1 PinoutДокумент14 страницGW1N-1 PinoutJune Anthony AsistioОценок пока нет
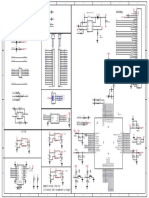
- Tang NANO 2704 (Schematic)Документ1 страницаTang NANO 2704 (Schematic)June Anthony Asistio100% (1)
- Peripheral Pin Select in 8-Bit Microcontrollers Technical BriefДокумент12 страницPeripheral Pin Select in 8-Bit Microcontrollers Technical BriefJune Anthony AsistioОценок пока нет
- Operational Amplifier Pspice Model of 8-Bit Pic MicrocontrollersДокумент18 страницOperational Amplifier Pspice Model of 8-Bit Pic MicrocontrollersJune Anthony AsistioОценок пока нет
- Tang NANO 2704 (Schematic)Документ1 страницаTang NANO 2704 (Schematic)June Anthony Asistio100% (1)
- Python Foe S60Документ18 страницPython Foe S60anon-613369100% (3)
- Temperature Sensor Module On 8-Bit PIC MicrocontrollersДокумент7 страницTemperature Sensor Module On 8-Bit PIC MicrocontrollersJune Anthony AsistioОценок пока нет
- 2 Demystifying Vias in High-Speed PCB DesignsДокумент30 страниц2 Demystifying Vias in High-Speed PCB DesignsJune Anthony AsistioОценок пока нет
- TB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BДокумент14 страницTB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BJune Anthony AsistioОценок пока нет
- TB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BДокумент14 страницTB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BJune Anthony AsistioОценок пока нет
- TB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BДокумент14 страницTB3155 Multiphase Interleaved PWM Controller With Diode Emulation DS90003155BJune Anthony AsistioОценок пока нет
- The Three Musketeers 2Документ473 страницыThe Three Musketeers 2hemlata_rameshОценок пока нет
- Mplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideДокумент30 страницMplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideanandkalodeОценок пока нет
- Mpasm Users GuideДокумент164 страницыMpasm Users GuideJune Anthony AsistioОценок пока нет
- The Sign of The FourДокумент77 страницThe Sign of The FourJune Anthony AsistioОценок пока нет
- Arthur Conan Doyle - Adventures of Sherlock HolmesДокумент182 страницыArthur Conan Doyle - Adventures of Sherlock Holmesb.krishna chaitanyaОценок пока нет
- Multi Sim 8Документ98 страницMulti Sim 8June Anthony AsistioОценок пока нет
- Artificial Intelligence: Frames and ScriptsДокумент5 страницArtificial Intelligence: Frames and ScriptsJune Anthony AsistioОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- 4.1 Order Data: PP45 Interface Modules - IF23Документ5 страниц4.1 Order Data: PP45 Interface Modules - IF23JEYSONОценок пока нет
- dm00260799 Writing To Nonvolatile Memory Without Disrupting Code Execution On Microcontrollers of The stm32l0 and stm32l1 Series StmicroelectronicsДокумент16 страницdm00260799 Writing To Nonvolatile Memory Without Disrupting Code Execution On Microcontrollers of The stm32l0 and stm32l1 Series Stmicroelectronicsusha raman adapaОценок пока нет
- VLSI Resume Cranes FormatДокумент3 страницыVLSI Resume Cranes FormatSathish YanamalaОценок пока нет
- Interface: Uarts and Bridges Usb Ethernet BridgeДокумент24 страницыInterface: Uarts and Bridges Usb Ethernet Bridgejohn hilbertОценок пока нет
- On Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling WorkДокумент21 страницаOn Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling Workggsdm sngs mmtОценок пока нет
- C8051 F34 XДокумент276 страницC8051 F34 XClovis Antonio RosaОценок пока нет
- BC 2300 ServiceДокумент88 страницBC 2300 ServicevaroОценок пока нет
- User Development GuideДокумент81 страницаUser Development GuideVelmani AravindОценок пока нет
- EETI Touch Driver Release NotesДокумент29 страницEETI Touch Driver Release NotesEsso MachadoОценок пока нет
- Esp32 Technical Reference Manual enДокумент660 страницEsp32 Technical Reference Manual enDeepak BhagatОценок пока нет
- Ni Myrio-1950: User Guide and SpecificationsДокумент20 страницNi Myrio-1950: User Guide and SpecificationsBa Bi100% (1)
- Zed-F9T: U-Blox F9 High Accuracy Timing ModuleДокумент23 страницыZed-F9T: U-Blox F9 High Accuracy Timing Modulekar karОценок пока нет
- DE0-CV Computer NiosIIДокумент51 страницаDE0-CV Computer NiosIIrommelОценок пока нет
- User'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadДокумент24 страницыUser'S Guide: 430Boost-Sense1 - Capacitive Touch Boosterpack For The LaunchpadasikuОценок пока нет
- UART interrupt tutorial - Part 2: Configuration and exampleДокумент8 страницUART interrupt tutorial - Part 2: Configuration and exampleKrishnakumar SomanpillaiОценок пока нет
- Advance Real Time Embedded Systems Training ReportДокумент23 страницыAdvance Real Time Embedded Systems Training ReportNipurn MinochaОценок пока нет
- SFG R303A User ManualДокумент24 страницыSFG R303A User ManualrajudpОценок пока нет
- Introduction To The Altera Qsys System Integration Tool: For Quartus II 14.0Документ35 страницIntroduction To The Altera Qsys System Integration Tool: For Quartus II 14.0linkskilОценок пока нет
- Implementation of Digital Filter by Using FPGAДокумент81 страницаImplementation of Digital Filter by Using FPGAisaac200894% (16)
- 530CID02 DS en PDFДокумент8 страниц530CID02 DS en PDFHatem LaadhariОценок пока нет
- Here Is The List of FPGA Based VLSI Projects Ideas For Experimenting With VHDL and Verilog HDLДокумент4 страницыHere Is The List of FPGA Based VLSI Projects Ideas For Experimenting With VHDL and Verilog HDLShahid Rabbani0% (1)
- Datasheet xc866Документ108 страницDatasheet xc866SartoОценок пока нет
- DE2-115 Computer NiosIIДокумент63 страницыDE2-115 Computer NiosIITran Quang Thai B1708908Оценок пока нет
- BTT Tft35-E3 v3.0 User GuideДокумент5 страницBTT Tft35-E3 v3.0 User Guidenacho vadilloОценок пока нет
- WTK6900H 24SSДокумент10 страницWTK6900H 24SSRoni AndriaОценок пока нет
- Serial Communications: ObjectivesДокумент26 страницSerial Communications: ObjectivesAmy OliverОценок пока нет
- BEE 049 - Design of Embedded System PDFДокумент95 страницBEE 049 - Design of Embedded System PDFSubhamОценок пока нет
- UM2118 User Manual: Metrology Firmware For The STM32F407VG and The STPM32 DevicesДокумент16 страницUM2118 User Manual: Metrology Firmware For The STM32F407VG and The STPM32 DevicesManel Bel Hadj MbarekОценок пока нет
- Unit 4Документ53 страницыUnit 4Brajesh KumarОценок пока нет
- 8-Bit Cmos Microcontroller Romless Ts80C31X2 At80C31X2: 1. FeaturesДокумент42 страницы8-Bit Cmos Microcontroller Romless Ts80C31X2 At80C31X2: 1. FeaturesNick DОценок пока нет