Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- III Research Copy TinДокумент39 страницIII Research Copy TinKean Cunch Prestige75% (4)
- Dynamic Force Analysis of MechanismДокумент21 страницаDynamic Force Analysis of MechanismAgare TubeОценок пока нет
- Mathematics: Quarter 4 - Module 1 Triangle InequalitiesДокумент18 страницMathematics: Quarter 4 - Module 1 Triangle InequalitiesJuliet Macaraeg Añes33% (3)
- WowДокумент5 страницWowKean Cunch PrestigeОценок пока нет
- TLC Team Leader Evaluation FormДокумент4 страницыTLC Team Leader Evaluation FormKean Cunch PrestigeОценок пока нет
- Week 7Документ1 страницаWeek 7Kean Cunch PrestigeОценок пока нет
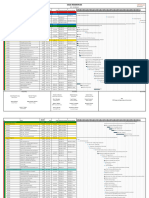
- EPC Schedule - Sage Residences - 03272023Документ200 страницEPC Schedule - Sage Residences - 03272023Kean Cunch PrestigeОценок пока нет
- Week 5Документ1 страницаWeek 5Kean Cunch PrestigeОценок пока нет
- Cea BR 198KДокумент16 страницCea BR 198KKean Cunch PrestigeОценок пока нет
- Drawing1-Model - PDF 2Документ1 страницаDrawing1-Model - PDF 2Kean Cunch PrestigeОценок пока нет
- LEOP, James Keannel A. February 7, 2023 PSMBC101 - Construction Accounting, Cost Control and Finance Assignment 1.3Документ1 страницаLEOP, James Keannel A. February 7, 2023 PSMBC101 - Construction Accounting, Cost Control and Finance Assignment 1.3Kean Cunch PrestigeОценок пока нет
- Assignment 1.2Документ1 страницаAssignment 1.2Kean Cunch PrestigeОценок пока нет
- Quiz 1.1Документ1 страницаQuiz 1.1Kean Cunch PrestigeОценок пока нет
- Free Construction Estimate Template ProjectManager ND23Документ4 страницыFree Construction Estimate Template ProjectManager ND23Kean Cunch PrestigeОценок пока нет
- Program Eligibity: Civil Engineering Student Empowerment For Excellent LeadershipДокумент2 страницыProgram Eligibity: Civil Engineering Student Empowerment For Excellent LeadershipKean Cunch PrestigeОценок пока нет
- CHAP 2 Part IIДокумент34 страницыCHAP 2 Part IIKean Cunch PrestigeОценок пока нет
- Position Vector and Dot ProductДокумент17 страницPosition Vector and Dot ProductKean Cunch PrestigeОценок пока нет
- Investigating and Comparing The Economic Use of Normal Concrete and Lightweight Concrete in Construction Projects in IranДокумент6 страницInvestigating and Comparing The Economic Use of Normal Concrete and Lightweight Concrete in Construction Projects in IranKean Cunch PrestigeОценок пока нет
- Water Code of The Philippines: Presidential Decree No.1067Документ2 страницыWater Code of The Philippines: Presidential Decree No.1067Kean Cunch PrestigeОценок пока нет
- STEELДокумент12 страницSTEELKean Cunch PrestigeОценок пока нет
- Student/Team Group Project Title Program Concentration Area Constraints Economic - Sustainability Structural Safety Constructability TradeoffsДокумент2 страницыStudent/Team Group Project Title Program Concentration Area Constraints Economic - Sustainability Structural Safety Constructability TradeoffsKean Cunch PrestigeОценок пока нет
- Hydrodynamic Masses and Hydrodynamic Moment of InertiaДокумент92 страницыHydrodynamic Masses and Hydrodynamic Moment of Inertiaak_fortysevenОценок пока нет
- Model Questions in Mathematical Physics According To CBCS PatternДокумент2 страницыModel Questions in Mathematical Physics According To CBCS PatternDigbijay RoutОценок пока нет
- WebAssign Calc HWДокумент12 страницWebAssign Calc HWTahera AhmedОценок пока нет
- Addition of Vectors Using Parallelogram MethodДокумент8 страницAddition of Vectors Using Parallelogram MethodLaurence AbanillaОценок пока нет
- SavvidyДокумент43 страницыSavvidyEvelinaОценок пока нет
- Handprint Perspective Part 2Документ73 страницыHandprint Perspective Part 2savrtuthdОценок пока нет
- Dynmicalsys HarwardДокумент65 страницDynmicalsys Harwardsri85Оценок пока нет
- Shortcuts For Ellipses and HyperBolaДокумент3 страницыShortcuts For Ellipses and HyperBolaChristian Simon D. SOLINAPОценок пока нет
- wfm01 01 Que 20240113Документ32 страницыwfm01 01 Que 20240113asafОценок пока нет
- AQA IGCSE Further Maths Revision Notes: 1. NumberДокумент16 страницAQA IGCSE Further Maths Revision Notes: 1. NumberDiyaОценок пока нет
- 1 PB PDFДокумент13 страниц1 PB PDFDeebak TamilmaniОценок пока нет
- Ten SoresДокумент7 страницTen SoresRafael PeresОценок пока нет
- (Am) Sab JPN Skema K2Документ11 страниц(Am) Sab JPN Skema K2Liew Fui JinОценок пока нет
- Corneal Imaging System Environment From EyesДокумент19 страницCorneal Imaging System Environment From EyesCuerpo IndigenaОценок пока нет
- 3 MoS PRSДокумент50 страниц3 MoS PRSAmritОценок пока нет
- Vocabulary Cards 6th Grade A Thru LДокумент72 страницыVocabulary Cards 6th Grade A Thru LJesse FieldsОценок пока нет
- MomentsДокумент17 страницMomentsAbhay KumarОценок пока нет
- # SolutionДокумент12 страниц# SolutionGiraffe thingОценок пока нет
- Cramer's Rule, Volume, and Linear TransformationsДокумент17 страницCramer's Rule, Volume, and Linear TransformationsJahangir AliОценок пока нет
- Angles in A Triangle PDFДокумент10 страницAngles in A Triangle PDFPyae PhyoОценок пока нет
- Miller Indices: Planes DirectionsДокумент47 страницMiller Indices: Planes DirectionsSilvers Rayleigh100% (1)
- XVOch Ey WZC 0 F 2 TJ 8 BxcsДокумент12 страницXVOch Ey WZC 0 F 2 TJ 8 Bxcsz5476259Оценок пока нет
- Mathematical References Part 4Документ85 страницMathematical References Part 4Prince QueenoОценок пока нет
- Shimura Varieties and ModuliДокумент76 страницShimura Varieties and ModuliVincent LinОценок пока нет
- Inner Product and NormsДокумент37 страницInner Product and NormsSofwah AlaydrusОценок пока нет
- Research Article: Locally Lipschitz Composition Operators in Space of The Functions of BoundedДокумент9 страницResearch Article: Locally Lipschitz Composition Operators in Space of The Functions of BoundedVictoria RojasОценок пока нет
- Gait Planning of Quadruped Walking and Climbing Robot For LocomoДокумент6 страницGait Planning of Quadruped Walking and Climbing Robot For Locomokurts010Оценок пока нет
- Solution 1:: Class X Chapter 6 - Solving Problems (Based On Quadratic Equations) MathsДокумент41 страницаSolution 1:: Class X Chapter 6 - Solving Problems (Based On Quadratic Equations) MathsVinodОценок пока нет