Вам также может понравиться
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- The NicotinaДокумент8 страницThe Nicotinab0beiiiОценок пока нет
- Isaac Asimov - "Nightfall"Документ20 страницIsaac Asimov - "Nightfall"Aditya Sharma100% (1)
- Modern Electrical Installation for Craft StudentsОт EverandModern Electrical Installation for Craft StudentsРейтинг: 4.5 из 5 звезд4.5/5 (4)
- DC Generators ExplainedДокумент85 страницDC Generators Explainedsrivaas131985Оценок пока нет
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2От EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Оценок пока нет
- Creature Loot PDF - GM BinderДокумент97 страницCreature Loot PDF - GM BinderAlec0% (1)
- Topic 2. DC Machines Part II - DC Motor 2019Документ75 страницTopic 2. DC Machines Part II - DC Motor 2019Lim Kai XuanОценок пока нет
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsОт EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsОценок пока нет
- Unit 6 Alternator (Synchronous Generator) : StructureДокумент29 страницUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Green Passbook Spent Solvent PDFДокумент2 страницыGreen Passbook Spent Solvent PDFnikhilbhorОценок пока нет
- Single Phase Induction Motor PDFДокумент32 страницыSingle Phase Induction Motor PDFHarsh RanaОценок пока нет
- V Ships Appln FormДокумент6 страницV Ships Appln Formkaushikbasu2010Оценок пока нет
- Gen CharacteristicsДокумент30 страницGen Characteristicskathy shiОценок пока нет
- Boat DesignДокумент8 страницBoat DesignporkovanОценок пока нет
- Securing Obligations Through Pledge and MortgageДокумент4 страницыSecuring Obligations Through Pledge and MortgagePrincessAngelaDeLeon100% (1)
- XDM-300 IMM ETSI B00 8.2.1-8.2.2 enДокумент386 страницXDM-300 IMM ETSI B00 8.2.1-8.2.2 enHipolitomvn100% (1)
- Homeroom Guidance Grade 12 Quarter - Module 4 Decisive PersonДокумент4 страницыHomeroom Guidance Grade 12 Quarter - Module 4 Decisive PersonMhiaBuenafe86% (36)
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Документ30 страницEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurОценок пока нет
- Unit I Synchronous GeneratorДокумент83 страницыUnit I Synchronous GeneratorAbdulaziz RefaeiОценок пока нет
- Geometrical and Magnetic Neutral AxisДокумент11 страницGeometrical and Magnetic Neutral AxisRahman SatarОценок пока нет
- DC Motor Equivalent Circuit and Magnetization CurveДокумент5 страницDC Motor Equivalent Circuit and Magnetization CurveLaurence Abrogena AlmazanОценок пока нет
- Electrical Machines II: Ahmed Mortuza SalequeДокумент20 страницElectrical Machines II: Ahmed Mortuza SalequeAhsan Kabir NuhelОценок пока нет
- EMII - Lecture 18 - Induction MachinesДокумент14 страницEMII - Lecture 18 - Induction MachinesHassan Al BaityОценок пока нет
- Synchronous Machine: Construction &types TypeДокумент9 страницSynchronous Machine: Construction &types TypeProma GurОценок пока нет
- Synchronous Machine 1Документ5 страницSynchronous Machine 1Proma GurОценок пока нет
- Chapter 2: AC Gearmotors and MotorsДокумент10 страницChapter 2: AC Gearmotors and MotorsJuanJo LlamasОценок пока нет
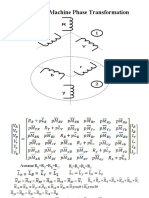
- Induction Machine Phase TransformationДокумент20 страницInduction Machine Phase Transformation7sn omerОценок пока нет
- 1-Phase IMДокумент8 страниц1-Phase IMabcdОценок пока нет
- Lab Manual: ACADEMIC YEAR 2015-16Документ48 страницLab Manual: ACADEMIC YEAR 2015-16ramjiОценок пока нет
- Demagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Документ2 страницыDemagnetizing and Cross-Magnetizing Conductors: Calculation of Demagnetizing Ampere-Turns Per Pole (Atd/Pole)Engr M.Arshad KhalidОценок пока нет
- Faculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursДокумент6 страницFaculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursŸØüsap BasiliОценок пока нет
- Chapter 4Документ20 страницChapter 4Mohammad Ali ShahОценок пока нет
- Induction Machine-2020Документ95 страницInduction Machine-2020Bharat SinghОценок пока нет
- BE8253 NotesДокумент45 страницBE8253 NotesArivaОценок пока нет
- Stator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorДокумент6 страницStator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorChenaker HamzaОценок пока нет
- EE-106 UNIT 5 NotesДокумент12 страницEE-106 UNIT 5 Notesece gptplptОценок пока нет
- Electrical MachineДокумент50 страницElectrical MachineRana AdelОценок пока нет
- Introduction of Ac GeneratorДокумент10 страницIntroduction of Ac Generatorprince395100% (1)
- Electrical Machines AssignmentДокумент63 страницыElectrical Machines AssignmentRohan AshishОценок пока нет
- 1 Single-Phase Motor 2020Документ22 страницы1 Single-Phase Motor 2020SerajОценок пока нет
- Unit-II - Part - III - Electric Braking FEDДокумент11 страницUnit-II - Part - III - Electric Braking FEDHarish ChandraОценок пока нет
- Unit 3Документ19 страницUnit 3Monika GОценок пока нет
- Free-Samples Amie Chapters Single Phase Induction MotorsДокумент19 страницFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzОценок пока нет
- CH 5 - Special MachinesДокумент14 страницCH 5 - Special MachinesMirkena kebedeОценок пока нет
- CHAPTER 4 - AC Machinery Fundamentals: EEEB344 Electromechanical DevicesДокумент17 страницCHAPTER 4 - AC Machinery Fundamentals: EEEB344 Electromechanical DevicesRaFaT HaQОценок пока нет
- DC Motor and GeneratorДокумент52 страницыDC Motor and GeneratorDIVY SINGHAL (RA2011003010143)Оценок пока нет
- EM3 - Unit1Документ11 страницEM3 - Unit1P.V.RAMA SHARMAОценок пока нет
- Anser Key EM - I 2019Документ15 страницAnser Key EM - I 2019Manoharan ManuОценок пока нет
- 3 PH IM Lecture 1 3 ConceptДокумент7 страниц3 PH IM Lecture 1 3 ConceptUttam KumarОценок пока нет
- لقطة شاشة 2023-02-09 في 1.00.13 ص PDFДокумент24 страницыلقطة شاشة 2023-02-09 في 1.00.13 ص PDFsajjad aakulОценок пока нет
- Lecture 04 - Chap 3 Modeling of Generators and TransformersДокумент20 страницLecture 04 - Chap 3 Modeling of Generators and TransformersHabes NoraОценок пока нет
- Unit - I: Basic Performance Equations of D.C. MotorsДокумент21 страницаUnit - I: Basic Performance Equations of D.C. MotorsNoah AdityaОценок пока нет
- EM I Unit IIДокумент87 страницEM I Unit IIPrakashОценок пока нет
- Assignment 5 Sir TubanДокумент16 страницAssignment 5 Sir TubanVincoy JohnlloydОценок пока нет
- Module 4 Area Moment and Conjugate Beam MethodsДокумент29 страницModule 4 Area Moment and Conjugate Beam MethodssaskialorrОценок пока нет
- c8 PDFДокумент64 страницыc8 PDFAnjaana PrashantОценок пока нет
- Synchronous MachinesДокумент31 страницаSynchronous Machinesrambala123Оценок пока нет
- Stepper MotorДокумент32 страницыStepper Motorapi-26587237100% (2)
- Lecture Note em - CH 3 1588264018Документ22 страницыLecture Note em - CH 3 1588264018Dr. Deepika YadavОценок пока нет
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorДокумент12 страницPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarОценок пока нет
- Anna University Practical Lab Manuals For Engineering StudentsДокумент13 страницAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreОценок пока нет
- 2.1 - Power Generation and Transmission (Topic 11.2)Документ81 страница2.1 - Power Generation and Transmission (Topic 11.2)Jiu ChangОценок пока нет
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationОт EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationОценок пока нет
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesОт EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesОценок пока нет
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- 1 Basic Principles: 1.1 Power in Single-Phase AC CircuitsДокумент9 страниц1 Basic Principles: 1.1 Power in Single-Phase AC CircuitsDharamОценок пока нет
- 3 Transmission Line Modelling and PerformanceДокумент22 страницы3 Transmission Line Modelling and PerformanceDharamОценок пока нет
- EM - II GTU Study Material GTU-Paper-Analysis All 04072020090955AMДокумент6 страницEM - II GTU Study Material GTU-Paper-Analysis All 04072020090955AMDharam100% (3)
- 5.1 Symmetrical Components and Its RequirementДокумент13 страниц5.1 Symmetrical Components and Its RequirementDharamОценок пока нет
- Economics for EngineersДокумент3 страницыEconomics for EngineersDarshit KotadiyaОценок пока нет
- Plastics - Myths & RealitiesДокумент49 страницPlastics - Myths & RealitiesshalipintoОценок пока нет
- Apchemi'S Project Lifecycle Partnership SolutionДокумент2 страницыApchemi'S Project Lifecycle Partnership SolutionDharamОценок пока нет
- PDFДокумент3 страницыPDFHaren ThankiОценок пока нет
- DoДокумент8 страницDoDharamОценок пока нет
- Unit-4 Synchronous & Auto Synchronous Motor: N S N SДокумент8 страницUnit-4 Synchronous & Auto Synchronous Motor: N S N SDharamОценок пока нет
- Environmental Problems of Finely Dispersed Titanium Dioxide ProductionДокумент13 страницEnvironmental Problems of Finely Dispersed Titanium Dioxide ProductionDharamОценок пока нет
- Single Phase Fully Controlled Rectifier2009-2Документ22 страницыSingle Phase Fully Controlled Rectifier2009-2Wildan AbdullahОценок пока нет
- Understanding the Meaning of Constitution and ConstitutionalismДокумент3 страницыUnderstanding the Meaning of Constitution and ConstitutionalismDharamОценок пока нет
- Indian-Constitution GTU Study Material E-Notes Unit-3 25102019114731AMДокумент7 страницIndian-Constitution GTU Study Material E-Notes Unit-3 25102019114731AMDharam0% (2)
- Indian-Constitution GTU Study Material E-Notes Unit-6 25102019114938AMДокумент4 страницыIndian-Constitution GTU Study Material E-Notes Unit-6 25102019114938AMDharamОценок пока нет
- Understanding the Meaning of Constitution and ConstitutionalismДокумент3 страницыUnderstanding the Meaning of Constitution and ConstitutionalismDharamОценок пока нет
- DoneДокумент4 страницыDoneDharamОценок пока нет
- DoneДокумент4 страницыDoneDharamОценок пока нет
- DoneДокумент3 страницыDoneDharamОценок пока нет
- Right to Life and Personal Liberty under Article 21Документ3 страницыRight to Life and Personal Liberty under Article 21DharamОценок пока нет
- Right to Life and Personal Liberty under Article 21Документ3 страницыRight to Life and Personal Liberty under Article 21DharamОценок пока нет
- Indian-Constitution GTU Study Material E-Notes Unit-6 25102019114938AMДокумент4 страницыIndian-Constitution GTU Study Material E-Notes Unit-6 25102019114938AMDharamОценок пока нет
- CPCB SoPs For Utilisation of HW July2016 PDFДокумент75 страницCPCB SoPs For Utilisation of HW July2016 PDFDharamОценок пока нет
- Indian-Constitution GTU Study Material E-Notes Unit-4 25102019114810AMДокумент6 страницIndian-Constitution GTU Study Material E-Notes Unit-4 25102019114810AMDharam100% (3)
- Indian-Constitution GTU Study Material E-Notes Unit-5 25102019114854AMДокумент5 страницIndian-Constitution GTU Study Material E-Notes Unit-5 25102019114854AMDharamОценок пока нет
- Indian-Constitution GTU Study Material E-Notes Unit-5 25102019114854AMДокумент5 страницIndian-Constitution GTU Study Material E-Notes Unit-5 25102019114854AMDharamОценок пока нет
- Darshan ETCДокумент8 страницDarshan ETCHaroОценок пока нет
- Engineering Graphics (ED For BE Students)Документ283 страницыEngineering Graphics (ED For BE Students)TB89% (9)
- Investigation Report on Engine Room Fire on Ferry BerlinДокумент63 страницыInvestigation Report on Engine Room Fire on Ferry Berlin卓文翔Оценок пока нет
- Hics 203-Organization Assignment ListДокумент2 страницыHics 203-Organization Assignment ListslusafОценок пока нет
- Electronic Throttle ControlДокумент67 страницElectronic Throttle Controlmkisa70100% (1)
- Ground Floor 40X80 Option-1Документ1 страницаGround Floor 40X80 Option-1Ashish SrivastavaОценок пока нет
- M Audio bx10s Manuel Utilisateur en 27417Документ8 страницM Audio bx10s Manuel Utilisateur en 27417TokioОценок пока нет
- Nistha Tamrakar Chicago Newa VIIДокумент2 страницыNistha Tamrakar Chicago Newa VIIKeshar Man Tamrakar (केशरमान ताम्राकार )Оценок пока нет
- The Three Key Linkages: Improving The Connections Between Marketing and SalesДокумент5 страницThe Three Key Linkages: Improving The Connections Between Marketing and SalesRuxandra PopaОценок пока нет
- Bond Strength of Normal-to-Lightweight Concrete InterfacesДокумент9 страницBond Strength of Normal-to-Lightweight Concrete InterfacesStefania RinaldiОценок пока нет
- Generic Strategies: Lessons From Crown Cork & Seal and Matching DellДокумент16 страницGeneric Strategies: Lessons From Crown Cork & Seal and Matching DellavaОценок пока нет
- REVISION OF INTEREST RATES ON DEPOSITS IN SANGAREDDYДокумент3 страницыREVISION OF INTEREST RATES ON DEPOSITS IN SANGAREDDYSRINIVASARAO JONNALAОценок пока нет
- Alarm Management Second Ed - Hollifield Habibi - IntroductionДокумент6 страницAlarm Management Second Ed - Hollifield Habibi - IntroductionDavid DuranОценок пока нет
- Report On Indian Airlines Industry On Social Media, Mar 2015Документ9 страницReport On Indian Airlines Industry On Social Media, Mar 2015Vang LianОценок пока нет
- C++ Practical FileДокумент15 страницC++ Practical FilePreetish ChandraОценок пока нет
- FloridaSharkman ProtocolsДокумент14 страницFloridaSharkman ProtocolsgurwaziОценок пока нет
- FILM STUDIES CORE COURSE GUIDEДокумент230 страницFILM STUDIES CORE COURSE GUIDEAmaldevvsОценок пока нет
- Certification of Psychology Specialists Application Form: Cover PageДокумент3 страницыCertification of Psychology Specialists Application Form: Cover PageJona Mae MetroОценок пока нет
- The Act of Proclamation of The Independence of The Filipino PeopleДокумент33 страницыThe Act of Proclamation of The Independence of The Filipino PeopleJULIANA RAE CONTRERASОценок пока нет
- Me2404 Set1Документ16 страницMe2404 Set1sakthivelsvsОценок пока нет
- 2017 2 Solarcon Catalogue Final RevisedДокумент8 страниц2017 2 Solarcon Catalogue Final RevisedNavarshi VishnubhotlaОценок пока нет
- 2004 Canon Bino BrochureДокумент6 страниц2004 Canon Bino BrochureCraig ThompsonОценок пока нет
- Course Code: Hrm353 L1Документ26 страницCourse Code: Hrm353 L1Jaskiran KaurОценок пока нет
- Neuroimaging - Methods PDFДокумент372 страницыNeuroimaging - Methods PDFliliana lilianaОценок пока нет