Вам также может понравиться
- 05.1 - Cinématique Des Systèmes Matériels - TD1Документ6 страниц05.1 - Cinématique Des Systèmes Matériels - TD1AlaealeaОценок пока нет
- Ch1 Conception MécaniqueДокумент12 страницCh1 Conception MécaniqueAdnen AissaouiОценок пока нет
- 2-Liaisons Mécaniques PDFДокумент2 страницы2-Liaisons Mécaniques PDFChokri AtefОценок пока нет
- Hyperstatisme Et Mobilité: Liaisons en ParallèleДокумент11 страницHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaОценок пока нет
- Chapitre 2bДокумент4 страницыChapitre 2bnasri imenОценок пока нет
- Chapitre 2bДокумент4 страницыChapitre 2bnasri imenОценок пока нет
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéДокумент2 страницыLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- 3 1 1 Modelisation LiaisonsДокумент2 страницы3 1 1 Modelisation Liaisonssebti abassiОценок пока нет
- Cinema TiqueДокумент9 страницCinema TiqueYahia ChouakiОценок пока нет
- Chap 1 Liaisons ProfДокумент4 страницыChap 1 Liaisons Profفدوى غانيОценок пока нет
- Application RDM Torseur MecaДокумент12 страницApplication RDM Torseur MecaFarid JellaliОценок пока нет
- PWT Liaisons MecaniquesДокумент22 страницыPWT Liaisons MecaniquesOmar Berkache100% (1)
- 85773677cours Torseur Statique PDFДокумент4 страницы85773677cours Torseur Statique PDFOuday ChikhaouiОценок пока нет
- Chapitre1 - Liaisons MécaniquesДокумент9 страницChapitre1 - Liaisons MécaniquesZakaria BaidОценок пока нет
- Chapitre1 - Liaisons MécaniquesДокумент9 страницChapitre1 - Liaisons MécaniquesZakaria BaidОценок пока нет
- Les Liaisons Mécaniques: Fiche Annexe UsuellesДокумент1 страницаLes Liaisons Mécaniques: Fiche Annexe UsuellesKarimОценок пока нет
- 2 Bis - Bilan Liaisons Mecanique V MCДокумент2 страницы2 Bis - Bilan Liaisons Mecanique V MCnadiОценок пока нет
- Montage UsinageДокумент2 страницыMontage UsinageLandry YoboueОценок пока нет
- (RDM) (FO) Resistance Des MateriauxДокумент2 страницы(RDM) (FO) Resistance Des MateriauxSimoMonkadОценок пока нет
- TD28 CorrectionДокумент8 страницTD28 CorrectionWasfi ZakariaОценок пока нет
- David NOËL - Fiche Méthode PFS PFDДокумент1 страницаDavid NOËL - Fiche Méthode PFS PFDdidoОценок пока нет
- Chap 4Документ29 страницChap 4yosr magmaguiОценок пока нет
- Liaisons EquivalДокумент5 страницLiaisons EquivalKamel BousninaОценок пока нет
- S07 Oscillateurs AmortisДокумент42 страницыS07 Oscillateurs AmortisSohaib LamineОценок пока нет
- Rappel 1 Ière AnnéeДокумент4 страницыRappel 1 Ière AnnéeAhmed fattoumОценок пока нет
- Chapitre2 Robotique 2017Документ28 страницChapitre2 Robotique 2017askariceОценок пока нет
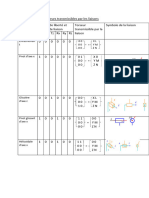
- Torseurs Transmissibles Par Les LiaisonsДокумент2 страницыTorseurs Transmissibles Par Les LiaisonsAssane FallОценок пока нет
- Vecteur Vitesse Audio 21-22Документ24 страницыVecteur Vitesse Audio 21-22hugo.bakalarz7Оценок пока нет
- Modélisation Géométrique Des LiaisonsДокумент7 страницModélisation Géométrique Des LiaisonsAbdel HilaliОценок пока нет
- TD Correction Derniers ExosДокумент15 страницTD Correction Derniers ExosSimpliceОценок пока нет
- TD18 CorrectionДокумент8 страницTD18 CorrectionHamza SadikОценок пока нет
- Ennoncé de L'examen MS 14-15Документ2 страницыEnnoncé de L'examen MS 14-15mohaОценок пока нет
- Correction TD2 ECG2Документ6 страницCorrection TD2 ECG2motivation31102001Оценок пока нет
- Torseurs Transmissibles Par Les LiaisonsДокумент2 страницыTorseurs Transmissibles Par Les LiaisonsAssane FallОценок пока нет
- Resumé Annexe OscillateurДокумент3 страницыResumé Annexe OscillateurHajarОценок пока нет
- Cours O.Unitaire Extraction L-L (Partie 4) L3 GPДокумент9 страницCours O.Unitaire Extraction L-L (Partie 4) L3 GPMål ÆkОценок пока нет
- 6 Ici 26 F Od NBQGH BJMGe KM JTF 8 Zy 8 W SPXW K0 La YKJДокумент42 страницы6 Ici 26 F Od NBQGH BJMGe KM JTF 8 Zy 8 W SPXW K0 La YKJayoubbenali281Оценок пока нет
- Achapitre4 (2021 2022)Документ26 страницAchapitre4 (2021 2022)bouch.yassine2020Оценок пока нет
- Exo Equipement de Transformation AgroalimentaireДокумент2 страницыExo Equipement de Transformation AgroalimentairedfeОценок пока нет
- Resume Chapitre 8. Oscillateurs Harmoniques:) T Cos (X X (T) 2Документ3 страницыResume Chapitre 8. Oscillateurs Harmoniques:) T Cos (X X (T) 2ahmedОценок пока нет
- 2a Tis Robotique Slides PDFДокумент213 страниц2a Tis Robotique Slides PDFSouhaib LoudaОценок пока нет
- Partiel Mecal3 Nov2014 PDFДокумент4 страницыPartiel Mecal3 Nov2014 PDFBruno GomesОценок пока нет
- Cisaillement 2STMДокумент6 страницCisaillement 2STMAlami ElОценок пока нет
- TD2 PDFДокумент6 страницTD2 PDFAbdelkhalek SaidiОценок пока нет
- Tapis Roulant CorrigéДокумент8 страницTapis Roulant CorrigésaraОценок пока нет
- Support Du Cours de Mécanique Du PointДокумент56 страницSupport Du Cours de Mécanique Du PointYoussef ChoucharОценок пока нет
- LiaisonsДокумент6 страницLiaisonsBIOS_012100% (1)
- Ds Mef 2011 GCVДокумент3 страницыDs Mef 2011 GCVHassene ElyassОценок пока нет
- Ds Mef 2011 GCVДокумент3 страницыDs Mef 2011 GCVHassene El YassОценок пока нет
- Ds Mef 2011 GCVДокумент3 страницыDs Mef 2011 GCVMed Hacen MoustaphaОценок пока нет
- Ds Mef 2011 GCV PDFДокумент3 страницыDs Mef 2011 GCV PDFMed Hacen MoustaphaОценок пока нет
- Ex Ef PotenceДокумент10 страницEx Ef PotenceChafik BouguezourОценок пока нет
- M1 AI TD1 Robotique Ali-Bey 19-20Документ2 страницыM1 AI TD1 Robotique Ali-Bey 19-20mouloud hadbiiОценок пока нет
- 32 Fermeture Geo ExercicesДокумент4 страницы32 Fermeture Geo Exerciceslaalai faicelОценок пока нет
- Colle-04-Dynamique 2TSI 23Документ2 страницыColle-04-Dynamique 2TSI 23ASTRO FFОценок пока нет
- PDF Ptsi TD Dynamique PDF - CompressДокумент14 страницPDF Ptsi TD Dynamique PDF - CompressYohann NgankongОценок пока нет
- SERIE TD2 - Cinematique - 2020 2021Документ10 страницSERIE TD2 - Cinematique - 2020 2021Nowe AhmadeОценок пока нет
- Klubprepa Extrait 4758Документ4 страницыKlubprepa Extrait 4758Mimita LafleurОценок пока нет
- Cinématique Du Solide - Cours (1) .PDF RF26ec1972Документ8 страницCinématique Du Solide - Cours (1) .PDF RF26ec1972Moulay ZoubirОценок пока нет
- Recherche D'Un (E) Conseiller (E) D'orientation ProfessionnelleДокумент1 страницаRecherche D'Un (E) Conseiller (E) D'orientation ProfessionnellezinzingenieurОценок пока нет
- 1 Analyse Fonctionnelle Et StructurelleДокумент6 страниц1 Analyse Fonctionnelle Et StructurellezinzingenieurОценок пока нет
- Les Codes Ussd Des Operateurs MobilesДокумент1 страницаLes Codes Ussd Des Operateurs Mobileszinzingenieur100% (1)
- Test de Sélection Instituteurs 2021Документ4 страницыTest de Sélection Instituteurs 2021zinzingenieurОценок пока нет
- 2 Actions MécaniquesДокумент5 страниц2 Actions MécaniqueszinzingenieurОценок пока нет
- Précis D'orthographe Pour La Langue TunenДокумент16 страницPrécis D'orthographe Pour La Langue Tunenzinzingenieur100% (1)
- Declaration Sur Honneur de Paiement DigitaliseДокумент1 страницаDeclaration Sur Honneur de Paiement DigitalisezinzingenieurОценок пока нет
- Techwood TFR-333Документ1 страницаTechwood TFR-333zinzingenieurОценок пока нет
- Manette Sans Fil DUALSHOCK®4 Mode D'emploiДокумент6 страницManette Sans Fil DUALSHOCK®4 Mode D'emploizinzingenieurОценок пока нет
- Domyos Av 500Документ6 страницDomyos Av 500zinzingenieurОценок пока нет
- Autorisation Travail Permis AssociéДокумент14 страницAutorisation Travail Permis AssociéHamid Bouleghab100% (1)
- Paul Ballanfat - Ivresse de La Mort Dans Le Discours Mystique Et Fondements Du ParadoxeДокумент32 страницыPaul Ballanfat - Ivresse de La Mort Dans Le Discours Mystique Et Fondements Du ParadoxeNikola PantićОценок пока нет
- (PFS) (TD) PalanДокумент2 страницы(PFS) (TD) PalanHachmiОценок пока нет
- ES Antragsformular FRДокумент2 страницыES Antragsformular FRVincent KirchhofОценок пока нет
- Interphonie & Vidéophonie, Halima FerganiДокумент23 страницыInterphonie & Vidéophonie, Halima Ferganifergani100% (1)
- Les Question QCM Management Strategique P. JaouhariДокумент7 страницLes Question QCM Management Strategique P. JaouhariSiham AkachoudОценок пока нет
- MonEtiquetteRetour NA2305191713144 2Документ2 страницыMonEtiquetteRetour NA2305191713144 2HADANGUE ChristopherОценок пока нет
- Olimpiada Franceza Model SubiectДокумент17 страницOlimpiada Franceza Model SubiectD.IОценок пока нет
- Limites Et Continuite Exercices Non Corriges 1 5Документ2 страницыLimites Et Continuite Exercices Non Corriges 1 5Ali KhatibmknsОценок пока нет
- Bulletin Kine N°25Документ32 страницыBulletin Kine N°25Arzhel MideletОценок пока нет
- Memo Lean Six SigmaДокумент1 страницаMemo Lean Six SigmamehdiОценок пока нет
- Community Manager Mademoiselle DigitalДокумент49 страницCommunity Manager Mademoiselle DigitalTuSaisQui Officiel 226Оценок пока нет
- 3131h19 Resume Chaps1 4Документ8 страниц3131h19 Resume Chaps1 4Khalifa-Assil BaoucheОценок пока нет
- Le Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueДокумент40 страницLe Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueMeryam MeryОценок пока нет
- EBOOK Melanie Milburne - Le Souffle de La Passion PDFДокумент84 страницыEBOOK Melanie Milburne - Le Souffle de La Passion PDFLaali Christy67% (3)
- Pedagogie 1Документ6 страницPedagogie 1gerard1993Оценок пока нет
- Approches Theoriques en Analyse de Polit PDFДокумент34 страницыApproches Theoriques en Analyse de Polit PDFJean KoffiОценок пока нет
- 7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023Документ2 страницы7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023cpd boualitОценок пока нет
- Contrat Type ArchitecteДокумент19 страницContrat Type ArchitecteAdel ShatlaОценок пока нет
- Voigtlander Vito B-FrenchДокумент33 страницыVoigtlander Vito B-FrenchCristina LonardoniОценок пока нет
- EXERCICEДокумент5 страницEXERCICEMarius DimaОценок пока нет
- Cours 2Документ25 страницCours 2jpОценок пока нет
- Asturias Leyenda AlbenizДокумент7 страницAsturias Leyenda AlbenizRavodОценок пока нет
- Métier de FormationДокумент2 страницыMétier de FormationRanto Andriampenitra RasoamanambolaОценок пока нет
- Bouallouche Ala EddineДокумент64 страницыBouallouche Ala EddineAmeur Bouhadja67% (3)
- Les Génies de La Science (Vol1) - DarwinДокумент98 страницLes Génies de La Science (Vol1) - Darwinuser scribdОценок пока нет
- 14 Principes de GestionДокумент4 страницы14 Principes de Gestionayman akroОценок пока нет
- 3 - Demarche InvestigationДокумент12 страниц3 - Demarche InvestigationMataraОценок пока нет
- Book PBCF FR WebДокумент70 страницBook PBCF FR WebMorgane patrick EffoutameОценок пока нет
- ATOUTS - Difficultes Du GabonДокумент1 страницаATOUTS - Difficultes Du GabonmbimbodevdasОценок пока нет