Вам также может понравиться
- Webcam-Based Eye Movement Analysis Using CNNДокумент7 страницWebcam-Based Eye Movement Analysis Using CNNikram iwanОценок пока нет
- Mask R-CNN Natalia 2020Документ4 страницыMask R-CNN Natalia 2020Nirwana SeptianiОценок пока нет
- Reliable and Fast Eye Finding in Close-Up ImagesДокумент6 страницReliable and Fast Eye Finding in Close-Up ImagesEmilio Marín LópezОценок пока нет
- Thesis Topics in Ophthalmology in AiimsДокумент5 страницThesis Topics in Ophthalmology in AiimsBuyCollegePaperOnlineUK100% (1)
- VNG 2013Документ6 страницVNG 2013AmineОценок пока нет
- Intelligence-Based Medicine: Rutuja ShindeДокумент15 страницIntelligence-Based Medicine: Rutuja ShinderОценок пока нет
- Statistical Eye Model For Normal EyesДокумент9 страницStatistical Eye Model For Normal EyesIts EithanОценок пока нет
- s12886 022 02620 7Документ8 страницs12886 022 02620 7MarioОценок пока нет
- Photorealistic Models For Pupil Light Reflex and Iridal Pattern DeformationДокумент8 страницPhotorealistic Models For Pupil Light Reflex and Iridal Pattern DeformationYui ReikoОценок пока нет
- Consejo 2018Документ5 страницConsejo 2018AlexandraОценок пока нет
- Proj8352 PDFДокумент12 страницProj8352 PDFNationalinstituteDsnrОценок пока нет
- Contact Lenses Vs Spectacles in Myopes: Is There Any Difference in Accommodative and Binocular Function?Документ12 страницContact Lenses Vs Spectacles in Myopes: Is There Any Difference in Accommodative and Binocular Function?mau tauОценок пока нет
- DEFOCUS - Photonics-2023Документ8 страницDEFOCUS - Photonics-2023Rafael IribarrenОценок пока нет
- Eye GazeДокумент8 страницEye Gazeyashaswi_pnОценок пока нет
- Localización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadДокумент12 страницLocalización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadkimalikrОценок пока нет
- Scleral Thickness Manuscript CT-JC-review SKG 31102022Документ25 страницScleral Thickness Manuscript CT-JC-review SKG 31102022Divya DarshiniОценок пока нет
- A Novel Approach To The Detection of Macula in Human Retinal ImageryДокумент6 страницA Novel Approach To The Detection of Macula in Human Retinal ImageryRabia SaeedОценок пока нет
- Robust Iris Segmentation Method Based On A New Active Contour Force With A Non-Circular NormalizationДокумент14 страницRobust Iris Segmentation Method Based On A New Active Contour Force With A Non-Circular NormalizationN Nanda GaneshОценок пока нет
- s12886 022 02600 XДокумент8 страницs12886 022 02600 XHariom ShuklaОценок пока нет
- Iris Segmentation For Iris Recognititon Using Hough TransformationДокумент5 страницIris Segmentation For Iris Recognititon Using Hough TransformationInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Comparative Study On The Performance of Textural Image Features For Active Contour SegmentationДокумент9 страницComparative Study On The Performance of Textural Image Features For Active Contour SegmentationDimona MoldovanuОценок пока нет
- Contact Lens and Anterior EyeДокумент5 страницContact Lens and Anterior EyeMaricris Palacios VergaraОценок пока нет
- Retinal Image Quality of A Human Eye Model - OSLO LT SoftwareДокумент11 страницRetinal Image Quality of A Human Eye Model - OSLO LT SoftwareRadu BabauОценок пока нет
- Toward Accurate and Fast Iris Segmentation For Iris BiometricsДокумент15 страницToward Accurate and Fast Iris Segmentation For Iris BiometricsNithiya SОценок пока нет
- A Hybrid Method For Iris SegmentationДокумент5 страницA Hybrid Method For Iris SegmentationJournal of ComputingОценок пока нет
- Effects of Progressive Addition Lens Wear On Digital Work in Pre-PresbyopesДокумент11 страницEffects of Progressive Addition Lens Wear On Digital Work in Pre-PresbyopesValentina PereaОценок пока нет
- LED-Based Photoacoustic Imaging: From Bench to BedsideОт EverandLED-Based Photoacoustic Imaging: From Bench to BedsideMithun Kuniyil Ajith SinghОценок пока нет
- 1112CRSTEuro Cs VinciguerraДокумент3 страницы1112CRSTEuro Cs VinciguerraR Andres Plaza ZОценок пока нет
- Application of A 3d-Printed Eye Model For Teaching Direct Ophthalmoscopy To UndergraduatesДокумент8 страницApplication of A 3d-Printed Eye Model For Teaching Direct Ophthalmoscopy To UndergraduatesWalisson BarbosaОценок пока нет
- Convolutional Neural Networks For Eye Detection in Remote Gaze Estimation SystemsДокумент6 страницConvolutional Neural Networks For Eye Detection in Remote Gaze Estimation SystemsNusrat PriotaОценок пока нет
- Efficient Convolutional Neural Network Based Optic Disc Analysis Using Digital Fundus ImagesДокумент4 страницыEfficient Convolutional Neural Network Based Optic Disc Analysis Using Digital Fundus Imagesdony septianОценок пока нет
- A Novel Approach To Iris Localization For IrisДокумент19 страницA Novel Approach To Iris Localization For IrisRajasree PkОценок пока нет
- Implementation and Segmentation of Glaucoma Using Mathematical Morphology of Retinal Fundus ImagesДокумент7 страницImplementation and Segmentation of Glaucoma Using Mathematical Morphology of Retinal Fundus ImagesIJRASETPublicationsОценок пока нет
- Update On Optical Biometry and Intraocular Lens Power CalculationДокумент15 страницUpdate On Optical Biometry and Intraocular Lens Power CalculationArdyОценок пока нет
- Ocular Aberrations Before and After Myopic Corneal Refractive Surgery: LASIK-Induced Changes Measured With Laser Ray TracingДокумент8 страницOcular Aberrations Before and After Myopic Corneal Refractive Surgery: LASIK-Induced Changes Measured With Laser Ray Tracingbonny_07_fk_unsri9248Оценок пока нет
- Deep-PRWIS: Periocular Recognition Without The Iris and Sclera Using Deep Learning FrameworksДокумент9 страницDeep-PRWIS: Periocular Recognition Without The Iris and Sclera Using Deep Learning FrameworksragouОценок пока нет
- On Analyzing Various Density Functions of Local Binary Patterns For Optic Disc SegmentationДокумент6 страницOn Analyzing Various Density Functions of Local Binary Patterns For Optic Disc SegmentationGhalia HayetОценок пока нет
- Jan Reznicek Dis 2014 PDFДокумент136 страницJan Reznicek Dis 2014 PDFNiteshОценок пока нет
- Thesis Topics in OphthalmologyДокумент7 страницThesis Topics in Ophthalmologyfbzgmpm3100% (2)
- Corneal Imaging System Environment From EyesДокумент19 страницCorneal Imaging System Environment From EyesCuerpo IndigenaОценок пока нет
- PHD Proposal Assessment of Corneal Biomechanics Properties Post Refractive SurgeryДокумент9 страницPHD Proposal Assessment of Corneal Biomechanics Properties Post Refractive SurgeryHassan MostafaОценок пока нет
- Accurate Optical Biometry Using IOL MasterДокумент5 страницAccurate Optical Biometry Using IOL Mastermuzicka9Оценок пока нет
- Assessment of Corneal Biomechanics, Tonometry and Pachymetry With The Corvis ST in MyopiaДокумент10 страницAssessment of Corneal Biomechanics, Tonometry and Pachymetry With The Corvis ST in Myopiavergarajaviera548Оценок пока нет
- A Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsДокумент5 страницA Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsInternational Organization of Scientific Research (IOSR)Оценок пока нет
- IJCRT2303148Документ7 страницIJCRT2303148Harsh LoharОценок пока нет
- Real Time Implementation of Eye Tracking System Using Arduino Uno Based Hardware InterfaceДокумент8 страницReal Time Implementation of Eye Tracking System Using Arduino Uno Based Hardware InterfaceInternational Journal of Engineering and TechniquesОценок пока нет
- The Importance Ofbeing Random: Statistical Principles Ofiris RecognitionДокумент13 страницThe Importance Ofbeing Random: Statistical Principles Ofiris RecognitionnehaAnkОценок пока нет
- Tmi 2015 2457891Документ11 страницTmi 2015 2457891Osama Ayad KadimОценок пока нет
- Clinical Differences Between Toric Intraocular LenДокумент8 страницClinical Differences Between Toric Intraocular LenonderonderОценок пока нет
- Ophthalmology Femtosecond LaserДокумент5 страницOphthalmology Femtosecond LaserChandrika MaluftiОценок пока нет
- A Standardized Approach To Extra-Oral and Intra-Oral Digital PhotographyДокумент17 страницA Standardized Approach To Extra-Oral and Intra-Oral Digital PhotographyCarolina AssisОценок пока нет
- Ch4 ModelEyeДокумент72 страницыCh4 ModelEyeGrupo Investigacion OptometriaОценок пока нет
- JCM 10 00704 v2Документ18 страницJCM 10 00704 v2Mrinmayee ThakurОценок пока нет
- A Deep Learning System For Automatic Assessment of Anterior Chamber Angle in Ultrasound Biomicroscopy ImagesДокумент11 страницA Deep Learning System For Automatic Assessment of Anterior Chamber Angle in Ultrasound Biomicroscopy Imageszj xiaoОценок пока нет
- Daughman Rubber Sheet Model.Документ4 страницыDaughman Rubber Sheet Model.KING BARBОценок пока нет
- Modeling The Optical Coupling Across The Anterior Chamber of The Eye Towards Polarimetric Glucose SensingДокумент7 страницModeling The Optical Coupling Across The Anterior Chamber of The Eye Towards Polarimetric Glucose SensingSmith RobinsonОценок пока нет
- A Preliminary Usability Comparison of Augmented and Virtual Reality User Interactions For Direct OphthalmosДокумент8 страницA Preliminary Usability Comparison of Augmented and Virtual Reality User Interactions For Direct OphthalmosWalisson BarbosaОценок пока нет
- OCT Dynamic-Focusing Microscope Objective For Optical Coherence Tomographyesign 1Документ5 страницOCT Dynamic-Focusing Microscope Objective For Optical Coherence Tomographyesign 1Kumarivalli KannuОценок пока нет
- Visual Acuity Outcome After Cataract SurgeryДокумент10 страницVisual Acuity Outcome After Cataract SurgeryAi AisyahОценок пока нет
- How Are Microscopes Used in SurgeryДокумент2 страницыHow Are Microscopes Used in SurgeryDhanashree TayadeОценок пока нет
- QB EE6201 Circuit Theory R2013Документ18 страницQB EE6201 Circuit Theory R2013CHARANОценок пока нет
- Ge6757 Total Quality Management Lesson PlanДокумент2 страницыGe6757 Total Quality Management Lesson PlanCHARANОценок пока нет
- Materials Chemistry C: Journal ofДокумент12 страницMaterials Chemistry C: Journal ofCHARANОценок пока нет
- EC8352 - SS - All in One PDFДокумент140 страницEC8352 - SS - All in One PDFCHARANОценок пока нет
- DC Material PDFДокумент149 страницDC Material PDFCHARANОценок пока нет
- STD: Ii 23.04.2020 Karadi Tales: Bablu and The Mouse: Follow Up ActivityДокумент4 страницыSTD: Ii 23.04.2020 Karadi Tales: Bablu and The Mouse: Follow Up ActivityCHARANОценок пока нет
- Faculty of Information and Communication EngineeringДокумент2 страницыFaculty of Information and Communication EngineeringCHARANОценок пока нет
- Modeling Human Eye Behavior During Mammographic Scanning: Preliminary ResultsДокумент12 страницModeling Human Eye Behavior During Mammographic Scanning: Preliminary ResultsCHARANОценок пока нет
- Sembodai Rukmani Varatharajan Engineering College: PPT PPT Black Board Black Board Black BoardДокумент2 страницыSembodai Rukmani Varatharajan Engineering College: PPT PPT Black Board Black Board Black BoardCHARANОценок пока нет
- A Novel High Performance Iris and Pupil Localization Method: M. Alipoor, H. Ahopay, and J. HaddadniaДокумент5 страницA Novel High Performance Iris and Pupil Localization Method: M. Alipoor, H. Ahopay, and J. HaddadniaCHARANОценок пока нет
- Das 2018 J. Phys. Conf. Ser. 1000 012053 PDFДокумент11 страницDas 2018 J. Phys. Conf. Ser. 1000 012053 PDFCHARANОценок пока нет
- Early Detection of Alzheimer's Using Digital Image Processing Through Iridology, An Alternative MethodДокумент12 страницEarly Detection of Alzheimer's Using Digital Image Processing Through Iridology, An Alternative MethodCHARANОценок пока нет
- Jan Meier MA PDFДокумент92 страницыJan Meier MA PDFCHARANОценок пока нет
- Network Analysis - Unit 4 - Week 1 PDFДокумент6 страницNetwork Analysis - Unit 4 - Week 1 PDFCHARANОценок пока нет
- Low Power Design Techniques and Implementation Strategies Adopted in VLSI CircuitsДокумент4 страницыLow Power Design Techniques and Implementation Strategies Adopted in VLSI CircuitsCHARANОценок пока нет
- Heat and Wave EquationДокумент4 страницыHeat and Wave EquationIvan ShaneОценок пока нет
- QДокумент7 страницQHoàngAnhОценок пока нет
- C ProgrammingДокумент25 страницC ProgrammingDhruva MishraОценок пока нет
- Math 2701 - Week 1 - Simple and Compound InterestДокумент28 страницMath 2701 - Week 1 - Simple and Compound InterestjasonОценок пока нет
- All PastpapersДокумент325 страницAll PastpapersAhmed Masoud100% (7)
- Mathematics V LP 1ST To 4TH GradingДокумент220 страницMathematics V LP 1ST To 4TH GradingsweetienasexypaОценок пока нет
- Question Bank Class: 10+1 & 10+2 (Mathematics) : Sunita Jagjit Singh Gurvir Kaur Jaspreet KaurДокумент101 страницаQuestion Bank Class: 10+1 & 10+2 (Mathematics) : Sunita Jagjit Singh Gurvir Kaur Jaspreet KaurSsОценок пока нет
- CCДокумент4 страницыCCferdi tayfunОценок пока нет
- Leibniz and Clarck CorrespondenceДокумент29 страницLeibniz and Clarck CorrespondenceFrank CamposОценок пока нет
- REE 09-2021 Room AssignmentДокумент125 страницREE 09-2021 Room AssignmentPRC Baguio100% (2)
- Standard Prop Model SPM Tuning ATOLL 10.1007 - 978!3!319-62407-5 - 26Документ14 страницStandard Prop Model SPM Tuning ATOLL 10.1007 - 978!3!319-62407-5 - 26soweto.mitchellОценок пока нет
- Linear Functional. Matrix Representation. Dual Space, Conjugate Space, Adjoint Space. Basis For Dual Space. Annihilator. Transpose of A Linear Mapping - PDFДокумент3 страницыLinear Functional. Matrix Representation. Dual Space, Conjugate Space, Adjoint Space. Basis For Dual Space. Annihilator. Transpose of A Linear Mapping - PDFJEZEQUEL LoïcОценок пока нет
- Adge Module6Документ11 страницAdge Module6Hanely De La PeñaОценок пока нет
- Tugas Ekstruction Rivansyah 1803811-DikonversiДокумент3 страницыTugas Ekstruction Rivansyah 1803811-Dikonversivansyah 01Оценок пока нет
- Torsion PDFДокумент8 страницTorsion PDFrobertorcovОценок пока нет
- Vertical Line TestДокумент3 страницыVertical Line TestAngel Silva VicenteОценок пока нет
- State Variable MethodsДокумент55 страницState Variable MethodsMomi keiraОценок пока нет
- Regime-Switching Models: Department of Economics and Nuffield College, University of OxfordДокумент50 страницRegime-Switching Models: Department of Economics and Nuffield College, University of OxfordeconométricaОценок пока нет
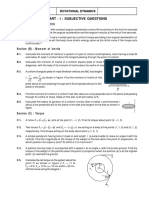
- CPP1 RotationaldynamicsДокумент14 страницCPP1 RotationaldynamicsBОценок пока нет
- Chapter 3Документ23 страницыChapter 3marwanОценок пока нет
- Thailand International Mathematical Olympiad 2015 2015: Primary 4 Past Paper Booklet 試題集Документ17 страницThailand International Mathematical Olympiad 2015 2015: Primary 4 Past Paper Booklet 試題集Marlyn Cayetano MercadoОценок пока нет
- Physics Chapter-1 Questions : Made By: M.farhan The Physics Teacher: Wahidullah HassanДокумент5 страницPhysics Chapter-1 Questions : Made By: M.farhan The Physics Teacher: Wahidullah HassanMohamadОценок пока нет
- 10 - Pulse Amplitude Modulation (PAM) PDFДокумент56 страниц10 - Pulse Amplitude Modulation (PAM) PDFPankaj KumarОценок пока нет
- Lesson Plan MathДокумент7 страницLesson Plan MathSERAD, WILMA LOUISEОценок пока нет
- Domino Effect AnalysisДокумент16 страницDomino Effect Analysisapi-270822363Оценок пока нет
- Spesfeed Express HelpДокумент85 страницSpesfeed Express HelpSalvador Villicaña Maldonado100% (1)
- Cavidad PrediccionДокумент9 страницCavidad PrediccionLuis MartinezОценок пока нет
- Essentials of Statistics For The Behavioral Sciences 9Th 9Th Edition Frederick J Gravetter Full ChapterДокумент51 страницаEssentials of Statistics For The Behavioral Sciences 9Th 9Th Edition Frederick J Gravetter Full Chapterjames.lenz339100% (7)
- Excel FormulaeДокумент564 страницыExcel Formulaesatish kumarОценок пока нет
- CVP SummaryДокумент10 страницCVP SummaryCj LopezОценок пока нет