Вам также может понравиться
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationОт EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationОценок пока нет
- Impromptu: A Few Notes On ImplementationДокумент16 страницImpromptu: A Few Notes On ImplementationAnonymous i1OsZqiCОценок пока нет
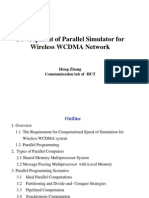
- Development of Parallel Simulator For Wireless WCDMA NetworkДокумент23 страницыDevelopment of Parallel Simulator For Wireless WCDMA Networkegarciac77Оценок пока нет
- ADPCM ImplementationДокумент13 страницADPCM ImplementationDumitru GheorgheОценок пока нет
- Unit V Processes and Operating SystemsДокумент37 страницUnit V Processes and Operating SystemsManikandan Annamalai100% (1)
- ES II AssignmentДокумент10 страницES II AssignmentRahul MandaogadeОценок пока нет
- Cycle StealingInstDecompEngineV2Документ4 страницыCycle StealingInstDecompEngineV2theethmastanaОценок пока нет
- 2.1 Hardware and Communication TextBook (Theteacher - Info)Документ42 страницы2.1 Hardware and Communication TextBook (Theteacher - Info)AhmadОценок пока нет
- Basic Structure of ComputersДокумент113 страницBasic Structure of ComputersSathish ShenoyОценок пока нет
- Co Notes Module 1Документ42 страницыCo Notes Module 1Vinyas M SОценок пока нет
- Module 1Документ36 страницModule 1shruthi p rОценок пока нет
- Explain How The Dijkstra's Banker's Algorithm Can Be Used To Avoid Unsafe Situations That Can Lead To Deadlock For A Single Resource TypeДокумент6 страницExplain How The Dijkstra's Banker's Algorithm Can Be Used To Avoid Unsafe Situations That Can Lead To Deadlock For A Single Resource TypeDivyanshu KhobragadeОценок пока нет
- Department of Computer Science and EngineeringДокумент32 страницыDepartment of Computer Science and Engineeringjexehif3730% (1)
- Cse IV Computer Organization (10cs46) SolutionДокумент46 страницCse IV Computer Organization (10cs46) SolutionTasleem Arif100% (1)
- Cse IV Computer Organization (10cs46) SolutionДокумент62 страницыCse IV Computer Organization (10cs46) Solutionnbpr0% (1)
- Final Year Project Progress ReportДокумент17 страницFinal Year Project Progress ReportMuhd AdhaОценок пока нет
- Unix Scheduling PrioritiesДокумент21 страницаUnix Scheduling PrioritiesmotazОценок пока нет
- ClockSynchronization in Software MPEG2Документ17 страницClockSynchronization in Software MPEG2idheivyaОценок пока нет
- CO - Module 1Документ31 страницаCO - Module 11RN19CS033 Chidwan RameshОценок пока нет
- Timer Wheel PDFДокумент24 страницыTimer Wheel PDFSarah ColemanОценок пока нет
- ICS 2305 Systems ProgrammingДокумент20 страницICS 2305 Systems ProgrammingMartin AkulaОценок пока нет
- Functional UnitsДокумент15 страницFunctional UnitssasisakthiОценок пока нет
- Excercise Solution 3-5Документ5 страницExcercise Solution 3-5f21bscs008Оценок пока нет
- IP Header Compression in UMTS Network: Thesis Work Presentation 14.02.2006Документ24 страницыIP Header Compression in UMTS Network: Thesis Work Presentation 14.02.2006elmoustaphaelОценок пока нет
- Network TheoryДокумент31 страницаNetwork TheoryPradeep M NОценок пока нет
- Chapter 2 Microprocessor, Memory and I/O: Some of Additional Architectural Differences AreДокумент24 страницыChapter 2 Microprocessor, Memory and I/O: Some of Additional Architectural Differences AreSatish KapalavayiОценок пока нет
- F06050303040 PDFДокумент11 страницF06050303040 PDFAbderrahim ZahriОценок пока нет
- Thesis Audio HimaliaДокумент5 страницThesis Audio HimaliaPaperWritersMobile100% (2)
- Seminar Data CompressionДокумент5 страницSeminar Data CompressionVishwaraj AnandОценок пока нет
- PYE 422 Lecture NoteДокумент11 страницPYE 422 Lecture Notecoker yusufОценок пока нет
- Elec327b DSP Processors 1Документ21 страницаElec327b DSP Processors 1GowthamUcekОценок пока нет
- MC0070Документ17 страницMC0070Rabi SinghОценок пока нет
- DSPДокумент13 страницDSPSayoshni Ghosh100% (1)
- MP3 Format: Theory of The StandardДокумент15 страницMP3 Format: Theory of The StandardMohammed PublicationsОценок пока нет
- CU7001 Periodical 2Документ6 страницCU7001 Periodical 2DarwinОценок пока нет
- CO2: 1. Concept of Program Execution/InterpretationДокумент22 страницыCO2: 1. Concept of Program Execution/InterpretationYasmeen SyedОценок пока нет
- SNTP Driven Event Management To Control Audio/Video/Buzzer Events by Using Streaming Media PlayerДокумент4 страницыSNTP Driven Event Management To Control Audio/Video/Buzzer Events by Using Streaming Media Playersurendiran123Оценок пока нет
- DSP_processingДокумент18 страницDSP_processingmarvel homesОценок пока нет
- PWM-Inverter Drive Control Operating With A Standard Personal ComputerДокумент6 страницPWM-Inverter Drive Control Operating With A Standard Personal Computeralpha1ahОценок пока нет
- DSP NotesДокумент15 страницDSP Notesradz248Оценок пока нет
- 21ec42 Module 5Документ29 страниц21ec42 Module 5ananyanagaral06Оценок пока нет
- Chapter 2 Part 2Документ18 страницChapter 2 Part 2زياد عبدالله عبدالحميدОценок пока нет
- Sowmya K P Asst. Professor Dept of Ise Citech Subject Code 15Cs34Документ119 страницSowmya K P Asst. Professor Dept of Ise Citech Subject Code 15Cs341BY18CS155 SHIVANI HOSANGADIОценок пока нет
- Ch-8.1 Multimedia Operating SystemДокумент10 страницCh-8.1 Multimedia Operating SystemsiddharthaОценок пока нет
- Module 1: Basic Structure of Computers 1.1 Basic Operational ConceptsДокумент34 страницыModule 1: Basic Structure of Computers 1.1 Basic Operational Conceptsyashu JОценок пока нет
- Wireless Polling Method Using RFДокумент101 страницаWireless Polling Method Using RFSravani SravzОценок пока нет
- DSP Processors: Circular BufferingДокумент22 страницыDSP Processors: Circular BufferingfidematОценок пока нет
- Improving Computer Performance Through Resource Cleanup, Data Bus Width, Pipelining, Memory Upgrades & Increased Cache SizeДокумент6 страницImproving Computer Performance Through Resource Cleanup, Data Bus Width, Pipelining, Memory Upgrades & Increased Cache SizeLeonОценок пока нет
- Mpi Programming 2Документ57 страницMpi Programming 2hopkeinstОценок пока нет
- Computer OrganizationДокумент150 страницComputer OrganizationT Syam KumarОценок пока нет
- Operating SystemДокумент48 страницOperating Systemarsalan48967Оценок пока нет
- Von Neumann Architecture and the Fetch-Decode-Execute CycleДокумент3 страницыVon Neumann Architecture and the Fetch-Decode-Execute CycleCarlville Jae EdañoОценок пока нет
- 20UP1A6628Документ13 страниц20UP1A6628nagavalli273Оценок пока нет
- Basic Computer Structure and PerformanceДокумент198 страницBasic Computer Structure and PerformanceNamanRungtaОценок пока нет
- Module 3 Basic Structure of ComputersДокумент76 страницModule 3 Basic Structure of ComputersMadhuОценок пока нет
- Estimated Necessary Time For Receiving The Information With Coordinator by Neuro-FuzzyДокумент5 страницEstimated Necessary Time For Receiving The Information With Coordinator by Neuro-FuzzyIJERDОценок пока нет
- Protocol EnergyMeterOpticalPort VT11Документ20 страницProtocol EnergyMeterOpticalPort VT11Narender SaineniОценок пока нет
- Processes: Distributed Systems Principles and ParadigmsДокумент78 страницProcesses: Distributed Systems Principles and ParadigmsZain HamzaОценок пока нет
- Embedded Radar SignalprocessingДокумент3 страницыEmbedded Radar SignalprocessingManikantaReddyОценок пока нет
- Unit-V 6703Документ84 страницыUnit-V 6703Ragunath T100% (1)
- Unit 4 Demand Concepts and Analysis: ObjectivesДокумент14 страницUnit 4 Demand Concepts and Analysis: ObjectiveseswaranОценок пока нет
- BioДокумент4 страницыBioeswaranОценок пока нет
- Unit 4 Demand Concepts and Analysis: ObjectivesДокумент14 страницUnit 4 Demand Concepts and Analysis: ObjectiveseswaranОценок пока нет
- The 4 Most Common Amplifier Classes ExplainedДокумент6 страницThe 4 Most Common Amplifier Classes ExplainedeswaranОценок пока нет
- Lec 1cДокумент42 страницыLec 1cchinmay2882Оценок пока нет
- Adc and DacДокумент5 страницAdc and DaceswaranОценок пока нет
- Body EffectДокумент1 страницаBody EffecteswaranОценок пока нет
- Design and Analysis of Algorithm Important QuestionsДокумент1 страницаDesign and Analysis of Algorithm Important QuestionseswaranОценок пока нет
- Mosfet Characteristics Mosfets Are Tri-Terminal, Unipolar, Voltage-Controlled, High Input Impedance DevicesДокумент5 страницMosfet Characteristics Mosfets Are Tri-Terminal, Unipolar, Voltage-Controlled, High Input Impedance DeviceseswaranОценок пока нет
- PSN College Embedded Systems Design ProcessДокумент17 страницPSN College Embedded Systems Design ProcesseswaranОценок пока нет
- Interrupts in 8085, ProgramДокумент4 страницыInterrupts in 8085, ProgrameswaranОценок пока нет
- CДокумент25 страницCDhanya MathewОценок пока нет
- Memory InterfacingДокумент2 страницыMemory InterfacingeswaranОценок пока нет
- UNIT IV EmbeddedДокумент16 страницUNIT IV EmbeddedeswaranОценок пока нет
- SQL TutorialДокумент200 страницSQL Tutorialroamer10100% (1)
- SQL TutorialДокумент200 страницSQL Tutorialroamer10100% (1)
- Carry Robot AdvancedДокумент4 страницыCarry Robot AdvancedeswaranОценок пока нет
- PDC Lab Manual for ECE Students at SVCETДокумент64 страницыPDC Lab Manual for ECE Students at SVCETeswaranОценок пока нет
- Reg. No: PSN College of Engineering and Technology (Autonomous)Документ3 страницыReg. No: PSN College of Engineering and Technology (Autonomous)eswaranОценок пока нет
- ECE Lab ManualДокумент95 страницECE Lab ManualranjithОценок пока нет
- TLWДокумент12 страницTLWeswaranОценок пока нет
- Subject Code & Name: 205108 & Vlsi Design Lab: Department of Electronics and Communication EngineeringДокумент2 страницыSubject Code & Name: 205108 & Vlsi Design Lab: Department of Electronics and Communication EngineeringeswaranОценок пока нет
- 2017 Projects TitlesДокумент38 страниц2017 Projects TitleseswaranОценок пока нет
- Ec6504 MP Part AДокумент13 страницEc6504 MP Part ASudha PalaniОценок пока нет
- Rock and Roll and The American Dream: Essential QuestionДокумент7 страницRock and Roll and The American Dream: Essential QuestionChad HorsleyОценок пока нет
- Reduction of Salivary Streptococcus Mutans Colonies in Children After Rinsing With 2.5% Green Tea SolutionДокумент6 страницReduction of Salivary Streptococcus Mutans Colonies in Children After Rinsing With 2.5% Green Tea SolutionSistia DefariОценок пока нет
- Demand for Money Theory ExplainedДокумент31 страницаDemand for Money Theory Explainedrichard kapimpaОценок пока нет
- Mobile Learning: The Next GenerationДокумент251 страницаMobile Learning: The Next GenerationSergio Srs100% (1)
- Planning Worksheet For Access and QualityДокумент3 страницыPlanning Worksheet For Access and QualityBar BetsОценок пока нет
- Application for Test Engineer PositionДокумент3 страницыApplication for Test Engineer PositionAsz WaNieОценок пока нет
- O'laco Vs Cocho ChitДокумент16 страницO'laco Vs Cocho ChitAngel Pagaran AmarОценок пока нет
- Impact On Modern TechnologyДокумент2 страницыImpact On Modern TechnologyNasrullah Khan AbidОценок пока нет
- EDIBLE PLANTSДокумент10 страницEDIBLE PLANTSBotany DepartmentОценок пока нет
- Epd-Lca Meranti Plywood-Final ReportДокумент29 страницEpd-Lca Meranti Plywood-Final ReporttangОценок пока нет
- Court Document SummaryДокумент15 страницCourt Document SummaryAkAsh prAkhAr vErmA100% (1)
- CHAP 1: STATS & SCIENTIFIC METHODДокумент9 страницCHAP 1: STATS & SCIENTIFIC METHODJesheryll ReasОценок пока нет
- King Rama VДокумент3 страницыKing Rama Vsamuel.soo.en.how2324Оценок пока нет
- Zen and The Art of Trumpet Play - Mark Van CleaveДокумент55 страницZen and The Art of Trumpet Play - Mark Van Cleavesz.sledz100% (1)
- People v. Sandiganbayan (Evidence)Документ2 страницыPeople v. Sandiganbayan (Evidence)donnamariebollosОценок пока нет
- Chapter 8 SQL Complex QueriesДокумент51 страницаChapter 8 SQL Complex QueriesJiawei TanОценок пока нет
- Narrative Techniques To Kill A MockingbirdДокумент4 страницыNarrative Techniques To Kill A MockingbirdJoshua LawrenceОценок пока нет
- Eight Principles of Ethical Leadership in EducationДокумент2 страницыEight Principles of Ethical Leadership in EducationKimberly Rose Nativo100% (1)
- MCD2040 T2 2019 Exam Content and StructureДокумент18 страницMCD2040 T2 2019 Exam Content and StructureheyitsmemuahОценок пока нет
- Highly Effective College StudentsДокумент8 страницHighly Effective College StudentsPhoenix Kylix0% (1)
- Enuma Elish LitChartДокумент20 страницEnuma Elish LitChartsugarntea24Оценок пока нет
- PROJECT REPORT Personal Selling PDFДокумент19 страницPROJECT REPORT Personal Selling PDFHimaja GharaiОценок пока нет
- Love Against All Odds: Summary of The Wedding DanceДокумент2 страницыLove Against All Odds: Summary of The Wedding DanceLYumang, Annika Joy D.Оценок пока нет
- BBFH107 - Business Statistics II Assignment IIДокумент2 страницыBBFH107 - Business Statistics II Assignment IIPeter TomboОценок пока нет
- SDSDДокумент114 страницSDSDbhatiasabОценок пока нет
- Atty. Represented Conflicting Interests in Property CaseДокумент35 страницAtty. Represented Conflicting Interests in Property CaseStella C. AtienzaОценок пока нет
- Nokia CaseДокумент28 страницNokia CaseErykah Faith PerezОценок пока нет
- Property Management Agreement TemplateДокумент2 страницыProperty Management Agreement TemplatemarcelОценок пока нет
- TR Massage Therapy NC IIДокумент162 страницыTR Massage Therapy NC IIAljon Fortaleza Balanag100% (4)
- WS 1.6 IvtДокумент2 страницыWS 1.6 IvtAN NGUYENОценок пока нет