Вам также может понравиться
- Motion Control ReportОт EverandMotion Control ReportРейтинг: 4 из 5 звезд4/5 (1)
- User Manual: 2-Phase Digital Stepper DriveДокумент13 страницUser Manual: 2-Phase Digital Stepper DriveWilliam BelascoОценок пока нет
- MotionGoo-DM542T Stepper Motor DriverДокумент12 страницMotionGoo-DM542T Stepper Motor DriverMake RownОценок пока нет
- User Manual: 2-Phase Digital Stepper DriveДокумент13 страницUser Manual: 2-Phase Digital Stepper Driveabelmil123Оценок пока нет
- User Manual: 2-Phase Digital Stepper DriveДокумент13 страницUser Manual: 2-Phase Digital Stepper DriverewelОценок пока нет
- DM542T PDFДокумент12 страницDM542T PDFyaidelОценок пока нет
- MS-L3 Servo-Stepper Drive User ManualДокумент12 страницMS-L3 Servo-Stepper Drive User ManualAsistencia Técnica JLFОценок пока нет
- MS-S3 User ManualДокумент9 страницMS-S3 User ManualParthiv DharaОценок пока нет
- 2002 Gun I Varactor Diode MdtcatalogДокумент84 страницы2002 Gun I Varactor Diode Mdtcatalog25031964Оценок пока нет
- FS9721_LP3 Data SheetДокумент33 страницыFS9721_LP3 Data SheetSouheilSouihiОценок пока нет
- PM1 IngДокумент25 страницPM1 IngAdam SchwemleinОценок пока нет
- DVP Serial Communication Module ManualДокумент66 страницDVP Serial Communication Module ManualNguyễn Quốc HọcОценок пока нет
- 1136 E01-ML01DP5 Usermanual EN V1.2Документ11 страниц1136 E01-ML01DP5 Usermanual EN V1.2HectorОценок пока нет
- Digital Magnetometer: Xtrinsic MAG3110 Three-AxisДокумент30 страницDigital Magnetometer: Xtrinsic MAG3110 Three-Axislevietphong100% (1)
- MS-L3P-L4P Servo-Stepper DriverДокумент9 страницMS-L3P-L4P Servo-Stepper DriverAsistencia Técnica JLFОценок пока нет
- Arduino 3D Wire Bending Machine: Nettur Technical Training FoundationДокумент23 страницыArduino 3D Wire Bending Machine: Nettur Technical Training FoundationManoj KumarОценок пока нет
- Torquetrak TPM: Torque and Power Monitoring SystemДокумент2 страницыTorquetrak TPM: Torque and Power Monitoring SystemNicolás Reyes GonzálezОценок пока нет
- Ie BusДокумент92 страницыIe BusMino MaraОценок пока нет
- DP-708/DP-5022: Stepper DriverДокумент23 страницыDP-708/DP-5022: Stepper DriverAnonymous Tz4CAK3Rb0Оценок пока нет
- CL57TДокумент14 страницCL57TNassim SADIKOUОценок пока нет
- Controlling Servo Motors with RF ModuleДокумент12 страницControlling Servo Motors with RF ModuleJemimah Aniel ClimacoОценок пока нет
- Chapter 2Документ15 страницChapter 2hlyanheinhОценок пока нет
- Sca100t 4Документ7 страницSca100t 4jimmy.potОценок пока нет
- OP - UKK .MLE .MPS .TR .21.rev .3.11Документ17 страницOP - UKK .MLE .MPS .TR .21.rev .3.11Mario Lizano janampaОценок пока нет
- USBCNC Breakout Board User ManualДокумент40 страницUSBCNC Breakout Board User ManualChaveiro GoldОценок пока нет
- MD13S User-MannualДокумент11 страницMD13S User-MannualDavidОценок пока нет
- Manual BTL B Z Digital e 0707 DRW 883882 00 000Документ16 страницManual BTL B Z Digital e 0707 DRW 883882 00 000SPSS 2023Оценок пока нет
- Sca100t 2Документ17 страницSca100t 2jimmy.potОценок пока нет
- E07-433M20S Usermanual EN v1.20Документ12 страницE07-433M20S Usermanual EN v1.20hxkwhkfdq5Оценок пока нет
- Minispeed Ms 60Документ36 страницMinispeed Ms 60Duvan Steven AguileraОценок пока нет
- Iis 2 MDCДокумент40 страницIis 2 MDCAdrian Reyes GalavizОценок пока нет
- YAKO MS-S3 User Manual-V2.1-190604Документ26 страницYAKO MS-S3 User Manual-V2.1-190604dominant cncОценок пока нет
- TP-LINK MC200CM User Guide PDFДокумент16 страницTP-LINK MC200CM User Guide PDFRaúl MiramontesОценок пока нет
- Operating Manual MHS-5200A Series Dual-Channel DDS Signal GeneratorДокумент20 страницOperating Manual MHS-5200A Series Dual-Channel DDS Signal Generatorsempreaprender3701Оценок пока нет
- MiniAx User Guide - Issue 1Документ37 страницMiniAx User Guide - Issue 1Control CheckОценок пока нет
- SEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Документ36 страницSEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Michael SalcedoОценок пока нет
- Pmw3389Dm-T3Qu: Optical Gaming Navigation Chip: Pixart Imaging IncДокумент20 страницPmw3389Dm-T3Qu: Optical Gaming Navigation Chip: Pixart Imaging IncMuhammad FarhanОценок пока нет
- ROBOT FISH Rakesh Sir's Information FileДокумент15 страницROBOT FISH Rakesh Sir's Information FileMTP FilmboxОценок пока нет
- PIM Master Anritsu MW82119BДокумент20 страницPIM Master Anritsu MW82119Bwilliamr5070Оценок пока нет
- 20980-A RADIO Modem User'S ManualДокумент10 страниц20980-A RADIO Modem User'S Manualtuấn nguyễn mạnhОценок пока нет
- Commander SK - Control TechniquesДокумент81 страницаCommander SK - Control TechniquesLeo Dos RamosОценок пока нет
- MLX90392 Datasheet MelexisДокумент42 страницыMLX90392 Datasheet Melexisshreyas dasОценок пока нет
- ATSAMA5D27 WLSOM1 Data Sheet ds60001590c-2256516Документ73 страницыATSAMA5D27 WLSOM1 Data Sheet ds60001590c-2256516Johnny MarquesОценок пока нет
- MD30C User's ManualДокумент17 страницMD30C User's ManualAMIR GHASEMIОценок пока нет
- E32-433T20Dt User Manual: Sx1278 433Mhz 100Mw Dip Wireless ModuleДокумент21 страницаE32-433T20Dt User Manual: Sx1278 433Mhz 100Mw Dip Wireless ModuleFreddy A. Meza DiazОценок пока нет
- E18-2G4U04B Usermanual EN v1.0Документ16 страницE18-2G4U04B Usermanual EN v1.0Trần LinhОценок пока нет
- E32-433T20DC Usermanual EN v1.6Документ21 страницаE32-433T20DC Usermanual EN v1.6amin rusydiОценок пока нет
- Si 3000Документ34 страницыSi 3000Edd PLanОценок пока нет
- Manual Digital Futronic Manual Eim en 84502Документ16 страницManual Digital Futronic Manual Eim en 84502David JimenezОценок пока нет
- Intelligent Reverse Braking SystemДокумент21 страницаIntelligent Reverse Braking SystemAlfieОценок пока нет
- Deep-Submicron Microprocessor Design IssuesДокумент12 страницDeep-Submicron Microprocessor Design IssuesgoltangoОценок пока нет
- LCD Display VID29 - Manual - EN-080606Документ10 страницLCD Display VID29 - Manual - EN-080606RacielMCОценок пока нет
- Hypervsn Operating ManualДокумент39 страницHypervsn Operating ManualAvinash TiwariОценок пока нет
- Sawera Textile ProposalДокумент7 страницSawera Textile ProposalSAWERA TEXTILES PVT LTDОценок пока нет
- Formike Electronic Co.,Ltd: Prduct SpecificatonДокумент33 страницыFormike Electronic Co.,Ltd: Prduct SpecificatonlulilanОценок пока нет
- Fluke PM3380B Reference ManualДокумент133 страницыFluke PM3380B Reference ManualDRF254Оценок пока нет
- Digital Weighing Controller Instruction ManualДокумент43 страницыDigital Weighing Controller Instruction ManualDidik BagasОценок пока нет
- MODBUS IO8R A - Ver5.0Документ17 страницMODBUS IO8R A - Ver5.0Fahmi AroffОценок пока нет
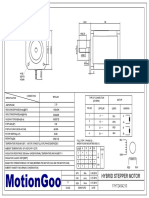
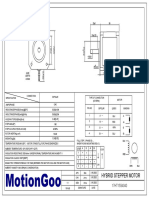
- Motiongoo Stepper Motor Drawing-17HT10S4070Документ1 страницаMotiongoo Stepper Motor Drawing-17HT10S4070Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT10S4070Документ1 страницаMotiongoo Stepper Motor Drawing-17HT10S4070Make RownОценок пока нет
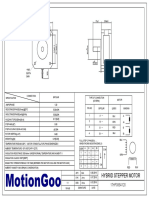
- Motiongoo Stepper Motor Drawing-17HT19S6040Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S6040Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT24S4210Документ1 страницаMotiongoo Stepper Motor Drawing-17HT24S4210Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT15S4040Документ1 страницаMotiongoo Stepper Motor Drawing-17HT15S4040Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT16S4200C1Документ1 страницаMotiongoo Stepper Motor Drawing-17HT16S4200C1Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19S4200C1Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S4200C1Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19S6040Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S6040Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19S4200C1Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S4200C1Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT13S6095Документ1 страницаMotiongoo Stepper Motor Drawing-17HT13S6095Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19S4085Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S4085Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT13S6095Документ1 страницаMotiongoo Stepper Motor Drawing-17HT13S6095Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19S4168C1Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19S4168C1Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT19D4200Документ1 страницаMotiongoo Stepper Motor Drawing-17HT19D4200Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT13S6095Документ1 страницаMotiongoo Stepper Motor Drawing-17HT13S6095Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT10S4070Документ1 страницаMotiongoo Stepper Motor Drawing-17HT10S4070Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT10S4070Документ1 страницаMotiongoo Stepper Motor Drawing-17HT10S4070Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT15S4150C1Документ1 страницаMotiongoo Stepper Motor Drawing-17HT15S4150C1Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF15S4090Документ1 страницаMotiongoo Stepper Motor Drawing-17HF15S4090Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT08S4100Документ1 страницаMotiongoo Stepper Motor Drawing-17HT08S4100Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF15S4090Документ1 страницаMotiongoo Stepper Motor Drawing-17HF15S4090Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HT13S6031Документ1 страницаMotiongoo Stepper Motor Drawing-17HT13S6031Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF15S4090Документ1 страницаMotiongoo Stepper Motor Drawing-17HF15S4090Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF15S4090Документ1 страницаMotiongoo Stepper Motor Drawing-17HF15S4090Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF19D6040Документ1 страницаMotiongoo Stepper Motor Drawing-17HF19D6040Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF19S4168Документ1 страницаMotiongoo Stepper Motor Drawing-17HF19S4168Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF15S4090Документ1 страницаMotiongoo Stepper Motor Drawing-17HF15S4090Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF08S4120Документ1 страницаMotiongoo Stepper Motor Drawing-17HF08S4120Make RownОценок пока нет
- Motiongoo Stepper Motor Drawing-17HF13D6031Документ1 страницаMotiongoo Stepper Motor Drawing-17HF13D6031Make RownОценок пока нет
- Motiongoo Geared Stepper Motor Drawing-17HT13S4040-PG5Документ1 страницаMotiongoo Geared Stepper Motor Drawing-17HT13S4040-PG5Make RownОценок пока нет
- Solar Panel Cleaning RobotДокумент4 страницыSolar Panel Cleaning RobotInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Automation AssignmentДокумент3 страницыAutomation AssignmentNaho Senay IIОценок пока нет
- Application Hints For Savitzky-Golay Digital Smoothing FiltersДокумент4 страницыApplication Hints For Savitzky-Golay Digital Smoothing Filtersupasara_wulung_1980Оценок пока нет
- KL3045Документ9 страницKL3045Bruna RamosОценок пока нет
- Tunlite 330484 Ffs Aen PDFДокумент5 страницTunlite 330484 Ffs Aen PDFdingeo11Оценок пока нет
- Electric Circuit Armature Windings PDFДокумент43 страницыElectric Circuit Armature Windings PDFravineel00975% (8)
- Philips 70fc930 Cassette Deck Service Manual (Indexed)Документ55 страницPhilips 70fc930 Cassette Deck Service Manual (Indexed)Ugo RampazzoОценок пока нет
- Integrated amplifiers £700-£1,600 Ultimate Group TestДокумент1 страницаIntegrated amplifiers £700-£1,600 Ultimate Group TestLuka TrengovskiОценок пока нет
- User's Manual for Blue Star VRF V Plus Air Conditioning SystemДокумент40 страницUser's Manual for Blue Star VRF V Plus Air Conditioning Systemjayesh patel100% (1)
- Video Processor Vep-2100fДокумент18 страницVideo Processor Vep-2100fVictor BlancoОценок пока нет
- Sony kv2199m5j kv-j21mf2j Chassis bg-2sДокумент36 страницSony kv2199m5j kv-j21mf2j Chassis bg-2sBandula Senevirathna100% (1)
- Poly SulfoneДокумент15 страницPoly SulfoneDidit Eko PrasetyoОценок пока нет
- RPM IndicatorДокумент39 страницRPM IndicatorAnkur PatelОценок пока нет
- Owner's Manual: Bridgeable Power AmplifierДокумент64 страницыOwner's Manual: Bridgeable Power AmplifiervanderleySCLОценок пока нет
- Wrfase Acceptance Letter 360 PDFДокумент3 страницыWrfase Acceptance Letter 360 PDFRizka SeptianaОценок пока нет
- Multimedia & CGДокумент59 страницMultimedia & CGSharu KhemОценок пока нет
- Partial Discharge Measurement Coupling MethodsДокумент2 страницыPartial Discharge Measurement Coupling MethodskashifОценок пока нет
- CCIE Data Center Cheat Sheet TitleДокумент4 страницыCCIE Data Center Cheat Sheet TitleNapster KingОценок пока нет
- Setting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionДокумент5 страницSetting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionstudskirbyОценок пока нет
- Measurement System Part - 1Документ25 страницMeasurement System Part - 1Subhajit SarkarОценок пока нет
- Satellite communication MCQ bank overviewДокумент68 страницSatellite communication MCQ bank overviewهانيالنويرةОценок пока нет
- Generator - Avk Dig 142 E-4 - En-Tlnr593588Документ159 страницGenerator - Avk Dig 142 E-4 - En-Tlnr593588சக்திவேல் கார்த்திகேயன்50% (2)
- Diagrama de Blu-Ray Sony HBD-E370Документ114 страницDiagrama de Blu-Ray Sony HBD-E370Antonio ChavezОценок пока нет
- Base conversion and binary arithmetic practice questionsДокумент47 страницBase conversion and binary arithmetic practice questionsrahul kОценок пока нет
- PnpdevsДокумент85 страницPnpdevsŽīã ÝãďãvОценок пока нет
- InteliDrive IPC DatasheetДокумент4 страницыInteliDrive IPC DatasheetMuhammad Shoaib HussainОценок пока нет
- Introduction To AndroidДокумент27 страницIntroduction To AndroidSeemalОценок пока нет
- Owner'S Manual: CautionДокумент16 страницOwner'S Manual: CautionRobert WatsonОценок пока нет
- 1a33 TDS PDFДокумент2 страницы1a33 TDS PDFFerrovolОценок пока нет
- Canon Speedlite MT-24EX PLДокумент19 страницCanon Speedlite MT-24EX PLVampulaОценок пока нет