Вам также может понравиться
- Statics Formula SheetДокумент2 страницыStatics Formula SheetjawboneОценок пока нет
- Concrete Pipe Installation Guide-CPMДокумент17 страницConcrete Pipe Installation Guide-CPMSankar CdmОценок пока нет
- D3755-14 Standard Test Method For Dielectric BreakdowДокумент6 страницD3755-14 Standard Test Method For Dielectric Breakdowjose flores100% (1)
- SRB DRBДокумент44 страницыSRB DRBAcads AccountОценок пока нет
- Hoarding Guide 2020Документ46 страницHoarding Guide 2020Mohammed HafizОценок пока нет
- Section III - ShearДокумент12 страницSection III - ShearAlem LoajnerОценок пока нет
- 1998 CAT 3126 Oper & Maint ManualДокумент93 страницы1998 CAT 3126 Oper & Maint Manualbatuhan kılıç100% (2)
- Statically Determinate Plane TrussДокумент56 страницStatically Determinate Plane Trussஅருண்ராஜ் கிருஷ்ணன்சாமிОценок пока нет
- Corrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsДокумент1 страницаCorrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsAsma Sed100% (1)
- WWW - Incar.tw-Kobelco SK 75 Service ManualДокумент5 страницWWW - Incar.tw-Kobelco SK 75 Service Manualpurnomo0% (1)
- Influence Lines For Statically Determinate StructuresДокумент196 страницInfluence Lines For Statically Determinate StructuresMvg Net100% (1)
- Chapter 02 - TorsionДокумент35 страницChapter 02 - Torsionsengthai100% (1)
- Flexural Analysis1Документ66 страницFlexural Analysis1hannan mohsinОценок пока нет
- Grouting in Rock TunnellingДокумент161 страницаGrouting in Rock TunnellingOanaОценок пока нет
- Chapter 11 BendingДокумент27 страницChapter 11 BendingSofwan JuewekОценок пока нет
- Beam DeflectionДокумент10 страницBeam Deflectioncarlo manabatОценок пока нет
- Shear Stress in BeamsДокумент8 страницShear Stress in BeamsDaniel NaughtonОценок пока нет
- Tutorial 3Документ2 страницыTutorial 3piyush kumarОценок пока нет
- CIVL311 - 911 - 2020 - Week 3 - Analysis and Design of Beams For Flexural Strength - Student - 4 PDFДокумент17 страницCIVL311 - 911 - 2020 - Week 3 - Analysis and Design of Beams For Flexural Strength - Student - 4 PDFBurhan AhmadОценок пока нет
- Concepts of Stress1 PDFДокумент18 страницConcepts of Stress1 PDFCarl Malone Lotivio LorillaОценок пока нет
- EGF316 Thin and Thick Cylinders - NotesДокумент20 страницEGF316 Thin and Thick Cylinders - NotesAlokWardhanSinghОценок пока нет
- Simple Stresses and Strains PDFДокумент104 страницыSimple Stresses and Strains PDFyaminiОценок пока нет
- CENG 2102 Theory I, Oct 2014 - 2Документ52 страницыCENG 2102 Theory I, Oct 2014 - 2amangirma100% (1)
- Deflection of BeamДокумент34 страницыDeflection of BeampurushothamanОценок пока нет
- Chapter IIIДокумент83 страницыChapter IIIlatendra kumar srivastavОценок пока нет
- Beam BucklingДокумент45 страницBeam BucklingSaleha QuadsiaОценок пока нет
- 1.plastic Analysis Theory & ProblemsДокумент47 страниц1.plastic Analysis Theory & ProblemsJack HaamboteОценок пока нет
- m4l29 Lesson 29 The Direct Stiffness Method: Beams (Continued)Документ16 страницm4l29 Lesson 29 The Direct Stiffness Method: Beams (Continued)Vitor Vale100% (1)
- Prediction of cutting forces in end millingДокумент16 страницPrediction of cutting forces in end millingMohsin RashidОценок пока нет
- Homework 2Документ6 страницHomework 2sirali940% (1)
- Analysis and Design of Beams For Bending: MEE 320: Strength of MaterialsДокумент36 страницAnalysis and Design of Beams For Bending: MEE 320: Strength of Materialskamalnath100% (1)
- ODU Torsion ChapterДокумент54 страницыODU Torsion ChapterMuhammad FahimОценок пока нет
- Mec30 Quiz 6 PaynalДокумент5 страницMec30 Quiz 6 PaynalYe JinОценок пока нет
- Particle Equilibrium Part 1: Free Body Diagrams and Force AnalysisДокумент18 страницParticle Equilibrium Part 1: Free Body Diagrams and Force AnalysisCasalta KennethОценок пока нет
- Riveted/Bolted Connections TypesДокумент9 страницRiveted/Bolted Connections TypesAeron Xavier PimentelОценок пока нет
- Chapter 7 Dynamics ExerciseДокумент5 страницChapter 7 Dynamics ExercisecheokwhОценок пока нет
- Chapter-4 (Analysis & Design of Columns)Документ65 страницChapter-4 (Analysis & Design of Columns)Tadesse MegersaОценок пока нет
- Mechanical Vibration WorksheetДокумент6 страницMechanical Vibration Worksheetduraiprakash83Оценок пока нет
- Tutorial 2 Trusses PDFДокумент8 страницTutorial 2 Trusses PDFBharat Sai100% (1)
- Shear Force and Bending Moment DiagramsДокумент31 страницаShear Force and Bending Moment DiagramsMuhammad Mumtaz AhmadОценок пока нет
- Keys, Cotters and Pin JointsДокумент15 страницKeys, Cotters and Pin JointsABO SDAMОценок пока нет
- Strength of Materials by S K Mondal 4 PDFДокумент34 страницыStrength of Materials by S K Mondal 4 PDFajaykrishna_99Оценок пока нет
- Calculate and Analyze Force VectorsДокумент16 страницCalculate and Analyze Force VectorsAnas Nazmi100% (2)
- Module 3 - Analysis of Plane Trusses Using Matrix Stiffness MethodДокумент39 страницModule 3 - Analysis of Plane Trusses Using Matrix Stiffness MethodVon Tiosing100% (1)
- Mechanics of Materials-II: Dr. Nusrat Hoque Shear CenterДокумент13 страницMechanics of Materials-II: Dr. Nusrat Hoque Shear CenterAL-AMIN AHMED MOBIN 1801015Оценок пока нет
- Applications of Energy Methods: - Principle of Stationary Potential Energy - Castigliano's TheoremДокумент33 страницыApplications of Energy Methods: - Principle of Stationary Potential Energy - Castigliano's TheoremSaurabh PednekarОценок пока нет
- SCE - 4 - Analysis of Trusses - Frames Using MOJ MOS - MOMДокумент2 страницыSCE - 4 - Analysis of Trusses - Frames Using MOJ MOS - MOMpatrick dgОценок пока нет
- Shear Force and Bending Moment Diagrams GuideДокумент15 страницShear Force and Bending Moment Diagrams GuidezidaaanОценок пока нет
- SFD and BMDДокумент18 страницSFD and BMDManash Protim GogoiОценок пока нет
- Engineering Mechanics (Analysis of Trusses)Документ5 страницEngineering Mechanics (Analysis of Trusses)Ema MiguelОценок пока нет
- Unit-I Thin Plate Theory, Structural InstabilityДокумент78 страницUnit-I Thin Plate Theory, Structural InstabilityNirav LakhaniОценок пока нет
- E.Mech Tutorials Mod 1Документ8 страницE.Mech Tutorials Mod 1rajee101Оценок пока нет
- Theory II, March 2015Документ26 страницTheory II, March 2015amangirmaОценок пока нет
- Design of Transmission System Unit IIIДокумент57 страницDesign of Transmission System Unit IIIRaj MohanОценок пока нет
- RCC Design 3/7Документ18 страницRCC Design 3/7Nandan Anil GaikwadОценок пока нет
- 5 Sifat Mekanik KeramikДокумент28 страниц5 Sifat Mekanik KeramikPutri Dewi NoviantiОценок пока нет
- Chapter 4Документ64 страницыChapter 4ISRAEL HAILUОценок пока нет
- 1 Beam DeflectionДокумент5 страниц1 Beam DeflectionqazilaОценок пока нет
- 2.1 Composite Beam Section PropertiesДокумент13 страниц2.1 Composite Beam Section PropertiesCarlo Gimarino SalazarОценок пока нет
- Chapter-4-Stresses in BeamsДокумент25 страницChapter-4-Stresses in BeamsSani MohammedОценок пока нет
- Shear Force and Bending Moment DiagramsДокумент10 страницShear Force and Bending Moment DiagramshaymanotОценок пока нет
- SHEAR FORCE AND BENDING MOMENT DIAGRAMSДокумент39 страницSHEAR FORCE AND BENDING MOMENT DIAGRAMSAmar AndargieОценок пока нет
- Chapter 2 for STM (2)Документ14 страницChapter 2 for STM (2)haymanotОценок пока нет
- Shear Forces and Bending MomentsДокумент7 страницShear Forces and Bending MomentsZewdieОценок пока нет
- Strength of Material CHAPTERДокумент21 страницаStrength of Material CHAPTERHiwot DemisseОценок пока нет
- Chapter 3 Lecture NoteДокумент19 страницChapter 3 Lecture NoteYedenekachew NigussieОценок пока нет
- Module - 4 Shear Force and Bending Moment Diagrams: SyllabusДокумент12 страницModule - 4 Shear Force and Bending Moment Diagrams: SyllabusThe AIRS CreationsОценок пока нет
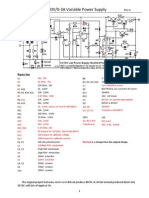
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Документ2 страницыModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraОценок пока нет
- Material Ease 20Документ7 страницMaterial Ease 20Sorin RipaОценок пока нет
- Pump HydraulicsДокумент5 страницPump HydraulicsSiddharth Kharat100% (1)
- SANTO 72358 KA3: Electronic RefrigeratorДокумент32 страницыSANTO 72358 KA3: Electronic RefrigeratorSakthipriya JeganathanОценок пока нет
- 2020 Can Am Off Road - Apache Track Kits Leaflet - enДокумент7 страниц2020 Can Am Off Road - Apache Track Kits Leaflet - enNicolas VillamayorОценок пока нет
- Indian Standards As On 17.01.2004 LatestДокумент19 страницIndian Standards As On 17.01.2004 LatestSaravana KumarОценок пока нет
- Revit Domoty 1Документ1 страницаRevit Domoty 1SAN RAKSAОценок пока нет
- Multi-disciplinary profile of IS/IT outsourcing researchДокумент47 страницMulti-disciplinary profile of IS/IT outsourcing researchIsabel MirandaОценок пока нет
- QlassicДокумент31 страницаQlassicQila HusinОценок пока нет
- Oracle E-Business Suite Release 11i Upgrade To R12.1Документ60 страницOracle E-Business Suite Release 11i Upgrade To R12.1Vladimir PacotaipeОценок пока нет
- CHM096-Tutorial 1 (Alkanes & Alkenes)Документ4 страницыCHM096-Tutorial 1 (Alkanes & Alkenes)Anonymous RD1CrAIОценок пока нет
- Core 3Документ2 страницыCore 3RidhiОценок пока нет
- Capacitor Banks - Schedules FILLEDДокумент11 страницCapacitor Banks - Schedules FILLEDyahyaОценок пока нет
- BDOs SheetsДокумент25 страницBDOs Sheets3J Solutions BDОценок пока нет
- Human-Environment InteractionДокумент3 страницыHuman-Environment Interactionapi-299100358Оценок пока нет
- TASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)Документ3 страницыTASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)frank 101Оценок пока нет
- Genesis of Spalling in Tandem Mill Work-RollsДокумент9 страницGenesis of Spalling in Tandem Mill Work-Rolls54321qazОценок пока нет
- MMMДокумент1 страницаMMMkhan22imranОценок пока нет
- Solution 2 AntennaДокумент7 страницSolution 2 Antennaabdulwahab12100% (1)
- Listado Articulos PVPДокумент116 страницListado Articulos PVPfausto.ca68Оценок пока нет
- Company Profile 2021Документ18 страницCompany Profile 2021Hamza FaheemОценок пока нет
- Sasirekha Computer ProjectДокумент90 страницSasirekha Computer ProjectAkurati RupendraОценок пока нет
- The Tongue Display Unit (TDU) For Electrotactile Spatiotemporal Pattern PresentationДокумент10 страницThe Tongue Display Unit (TDU) For Electrotactile Spatiotemporal Pattern PresentationFrancisco Vicent PachecoОценок пока нет