Вам также может понравиться
- Homework 1 ConverterДокумент4 страницыHomework 1 ConverterGuilherme E Tamira Lopez0% (3)
- Immitance InverterДокумент4 страницыImmitance Inverteramitgh88Оценок пока нет
- Probs CH 2Документ2 страницыProbs CH 2Kiran KumarОценок пока нет
- Switchgear PremsetДокумент97 страницSwitchgear PremsetJesus Ignacio Calle PerezОценок пока нет
- AC Equivalent Circuit ModelingДокумент65 страницAC Equivalent Circuit Modelinghey_gluppyОценок пока нет
- Review of Power Electronics-Chapter - 6Документ17 страницReview of Power Electronics-Chapter - 6ee mce dataОценок пока нет
- Voltage Tracking of A Multi-Input InterleavedДокумент4 страницыVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALОценок пока нет
- Circuits Laboratory Experiment 7: Design of A Single Transistor AmplifierДокумент18 страницCircuits Laboratory Experiment 7: Design of A Single Transistor Amplifierconference RequirementsОценок пока нет
- Series - Parallel-RLC CKT EquationДокумент13 страницSeries - Parallel-RLC CKT EquationEjaz MahfuzОценок пока нет
- Experiment #5 Pulse Response of Simple RC & RL CircuitsДокумент11 страницExperiment #5 Pulse Response of Simple RC & RL CircuitsAhmed HamoudaОценок пока нет
- Small-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMДокумент8 страницSmall-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMAslı ÇakırОценок пока нет
- Partial Differenntiation Purdue Chapter 7Документ11 страницPartial Differenntiation Purdue Chapter 7Yap Yih ShanОценок пока нет
- Exp. 4, Part 2: Converter Transfer FunctionsДокумент41 страницаExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaОценок пока нет
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreДокумент4 страницыTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianОценок пока нет
- DC To AC InverterДокумент5 страницDC To AC InverterRexy RamadhanОценок пока нет
- Chapter 08 BJT Small Signal AnalysisДокумент58 страницChapter 08 BJT Small Signal Analysiscinematic300650% (4)
- CH 7Документ54 страницыCH 7toalomari0Оценок пока нет
- QUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeДокумент6 страницQUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeSheetal VermaОценок пока нет
- Chapter 2 - Part 3: Isolated ConverterДокумент28 страницChapter 2 - Part 3: Isolated ConverterWeehao SiowОценок пока нет
- A DQ Synchronous Reference Frame Current Control For SinglephaseДокумент5 страницA DQ Synchronous Reference Frame Current Control For SinglephaseKumavat AmarОценок пока нет
- Electronics Lab 10Документ14 страницElectronics Lab 10saadkhalisОценок пока нет
- 2.8 Electromechanical System Transfer Functions: Skill-Assessment Exercise 2.10Документ6 страниц2.8 Electromechanical System Transfer Functions: Skill-Assessment Exercise 2.10Eclipse ShuОценок пока нет
- Analogue ElectronicsДокумент7 страницAnalogue ElectronicsrizwanahbОценок пока нет
- AQRspicemodelДокумент13 страницAQRspicemodelRakesh SandarativjuОценок пока нет
- S D S D D D S S D D S: P N N PДокумент5 страницS D S D D D S S D D S: P N N PPankajSinghBhatiОценок пока нет
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterДокумент7 страницSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarОценок пока нет
- C. Buck-Boost Converter Modeling D. Cuk Converter Modeling: Di V DT L TDT Qon DV V DT C RДокумент6 страницC. Buck-Boost Converter Modeling D. Cuk Converter Modeling: Di V DT L TDT Qon DV V DT C RTeja VaitlaОценок пока нет
- RectifierДокумент53 страницыRectifierYogi Bekti P100% (1)
- Research Procedure For Buck-Boost Converter For Small Electric VehiclesДокумент7 страницResearch Procedure For Buck-Boost Converter For Small Electric Vehiclesali ghalibОценок пока нет
- Flyback PDFДокумент11 страницFlyback PDFlucianoОценок пока нет
- Fundamentals of RF Circuit Design - ch7Документ14 страницFundamentals of RF Circuit Design - ch7asarolicОценок пока нет
- STB LabДокумент16 страницSTB Labapi-3831923Оценок пока нет
- Solu TestДокумент6 страницSolu TestZy AnОценок пока нет
- BGR Bipolar JSSC 1976 IntegratedДокумент4 страницыBGR Bipolar JSSC 1976 Integratedgupt_82Оценок пока нет
- Transformer-Induced Low-Frequency Oscillations in The Series-Resonant Converter Ieee - Klesser - 1991Документ12 страницTransformer-Induced Low-Frequency Oscillations in The Series-Resonant Converter Ieee - Klesser - 1991cristian1961Оценок пока нет
- X L W C: Motor Shaft CapacitiveДокумент14 страницX L W C: Motor Shaft CapacitiveMuhamadFirdaus0% (1)
- Study of Bifurcation and Chaos in The Current-Mode Controlled Buck-Boost DC-DC ConverterДокумент6 страницStudy of Bifurcation and Chaos in The Current-Mode Controlled Buck-Boost DC-DC ConverterLazaro S. EscalanteОценок пока нет
- Vco WДокумент8 страницVco Wapi-3725139Оценок пока нет
- Filter Design For Grid Connected InvertersДокумент7 страницFilter Design For Grid Connected InvertersAirton FloresОценок пока нет
- 219 E603Документ4 страницы219 E603ptarwatkarОценок пока нет
- AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeДокумент29 страницAC and DC Equivalent Circuit Modeling of The Discontinuous Conduction Modetrollforever 123Оценок пока нет
- RectifiersДокумент51 страницаRectifiersfa21-bee-015100% (1)
- Aris 01Документ8 страницAris 01zaid aihsanОценок пока нет
- The Transfer Function PDFДокумент15 страницThe Transfer Function PDFArnav KushwahaОценок пока нет
- Cap 7Документ10 страницCap 7JUAN D4VID QОценок пока нет
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforДокумент7 страницShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15Оценок пока нет
- Parameters Conversion TableДокумент7 страницParameters Conversion TabledhruvaaaaaОценок пока нет
- (AMW0208) Class E High-Efficiency Power Amplifiers - Historical Aspect and Future ProspectДокумент8 страниц(AMW0208) Class E High-Efficiency Power Amplifiers - Historical Aspect and Future ProspectJ Jesús Villanueva GarcíaОценок пока нет
- Tutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Документ5 страницTutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Shah ZaibОценок пока нет
- Analysis of SEPIC For PV-Applications Using PI Controller and Current Mode ControlДокумент4 страницыAnalysis of SEPIC For PV-Applications Using PI Controller and Current Mode ControlSindhujaSindhuОценок пока нет
- SimulationДокумент9 страницSimulationgaraamohamed7Оценок пока нет
- 11 Chapter 3Документ23 страницы11 Chapter 3sathishОценок пока нет
- GATE (1991-2010) Solved Papers EEДокумент261 страницаGATE (1991-2010) Solved Papers EEqwer0% (1)
- Transfer FunctionДокумент40 страницTransfer FunctionLai Yon Peng67% (3)
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsОт EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsОценок пока нет
- Tunnel Field-effect Transistors (TFET): Modelling and SimulationОт EverandTunnel Field-effect Transistors (TFET): Modelling and SimulationОценок пока нет
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsОт EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsОценок пока нет
- Lab 06-Differential Bus Bar ProtectionДокумент6 страницLab 06-Differential Bus Bar ProtectionAliza SharifОценок пока нет
- Cal For 5MWДокумент90 страницCal For 5MWMinh NguyenОценок пока нет
- UFT SpecificationsДокумент11 страницUFT SpecificationsabduОценок пока нет
- Aceros Al SilicioДокумент17 страницAceros Al SilicioEnergia_XОценок пока нет
- PSCAD Course Notes-V4-Double-SidedДокумент127 страницPSCAD Course Notes-V4-Double-Sidedsandeep kumar mishra100% (2)
- Accessories For Medium Voltage Distribution Networks LRДокумент56 страницAccessories For Medium Voltage Distribution Networks LRAbdellah AbdouОценок пока нет
- Etwork Rotection & Utomation Uide: N P A GДокумент25 страницEtwork Rotection & Utomation Uide: N P A GmubarakkirkoОценок пока нет
- Unit3 - Electrical SystemДокумент57 страницUnit3 - Electrical SystemNethaji BKОценок пока нет
- TV ABB TDC 6-G - enДокумент2 страницыTV ABB TDC 6-G - en600sОценок пока нет
- Manufacturing, Testing and Calibration Various Electrical EquipmentДокумент30 страницManufacturing, Testing and Calibration Various Electrical EquipmentHarsh ThakurОценок пока нет
- Fire Safety AspectsДокумент20 страницFire Safety AspectsbisweswarОценок пока нет
- Easotor Guia Practicas Power WorldДокумент12 страницEasotor Guia Practicas Power WorldWilmer TutaОценок пока нет
- UntitledДокумент36 страницUntitledSwayamОценок пока нет
- CTX (R-410A) SeriesДокумент31 страницаCTX (R-410A) SeriesZaid SamhaОценок пока нет
- PF Jones Bypass Relay Fitting InstructionsДокумент2 страницыPF Jones Bypass Relay Fitting Instructionssprite2lОценок пока нет
- 8410 ManualДокумент45 страниц8410 Manualviatr0nicОценок пока нет
- 09 Presentación Test Antes de TocarДокумент41 страница09 Presentación Test Antes de TocarAnonymous 1dCz409sОценок пока нет
- JEE Mains 2024 Question Paper Shift 2 27 JanДокумент4 страницыJEE Mains 2024 Question Paper Shift 2 27 JanAnjali SahooОценок пока нет
- Unit I: Fundamental of Protective Relaying: Class: B.E. (Electrical) Subject: Switchgear and ProtectionДокумент6 страницUnit I: Fundamental of Protective Relaying: Class: B.E. (Electrical) Subject: Switchgear and Protectionage geaОценок пока нет
- Automatic Microprocessor Control Panel For Stand-By GeneratorДокумент33 страницыAutomatic Microprocessor Control Panel For Stand-By GeneratorOmarColonОценок пока нет
- Maquet Betaclassic Alphaclassic 111801 111802 111803 Maintenance and Repair Instructions PDFДокумент54 страницыMaquet Betaclassic Alphaclassic 111801 111802 111803 Maintenance and Repair Instructions PDFalex5vidal-3Оценок пока нет
- IGCSE Physics - DefinitionsДокумент24 страницыIGCSE Physics - DefinitionsBala Malaivendan100% (1)
- (Nagsarkar, T. K. Sukhija, M. S) Power System Ana (B-Ok - Xyz)Документ788 страниц(Nagsarkar, T. K. Sukhija, M. S) Power System Ana (B-Ok - Xyz)ahmed70% (10)
- Chromophare Surgical and Examination Light: Pre-Installation InformationДокумент23 страницыChromophare Surgical and Examination Light: Pre-Installation InformationCesar AlfaroОценок пока нет
- SIWES Report of 2015 2016 SessionДокумент61 страницаSIWES Report of 2015 2016 Sessionmuhammad07066893449Оценок пока нет
- Voltage Drop Calculation: Voltage Change During Drive StartДокумент3 страницыVoltage Drop Calculation: Voltage Change During Drive StartHans De Keulenaer79% (14)
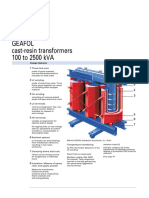
- Geafolproduct EnglishДокумент4 страницыGeafolproduct EnglishkostyaОценок пока нет
- Cne ReportДокумент11 страницCne ReportChirag Shah100% (1)
- HEC 7S - RuДокумент6 страницHEC 7S - Rut_syamprasadОценок пока нет