Вам также может понравиться
- Exercices Corriges Sur Les Nombres ReelsДокумент14 страницExercices Corriges Sur Les Nombres ReelsIkounad Yassine96% (27)
- Cours de Langage CДокумент33 страницыCours de Langage Cmoutched50% (2)
- Fonctions NumeriquesДокумент6 страницFonctions Numeriquesluxiole100% (6)
- TD AsservissementДокумент8 страницTD AsservissementMohamed OuddourОценок пока нет
- CHAP 4 Martin Gariepy 2013Документ13 страницCHAP 4 Martin Gariepy 2013sb aliОценок пока нет
- Commade Des Système Linéaires TD1Документ2 страницыCommade Des Système Linéaires TD1Grine Salah Eddine100% (1)
- Chapitre 2Документ16 страницChapitre 2Salmi AbdelkaderОценок пока нет
- La Transformée en ZДокумент5 страницLa Transformée en ZBenchabane AbderrahimОценок пока нет
- Cours Auto Chapitre 2Документ4 страницыCours Auto Chapitre 2Nabil TAALLAHОценок пока нет
- TD Automatique Systèmes de BaseДокумент2 страницыTD Automatique Systèmes de Basefatima zahra el maouiОценок пока нет
- TP 02 Syst Lin Ass S4 Auto.1Документ4 страницыTP 02 Syst Lin Ass S4 Auto.1moussaab yousfiОценок пока нет
- Examen Automatique Session Du PrintempsДокумент3 страницыExamen Automatique Session Du PrintempsZakaria Belyamani100% (1)
- TP San 1 22 23Документ4 страницыTP San 1 22 23Anfel CОценок пока нет
- TP1 AutomatiqueДокумент14 страницTP1 AutomatiqueM'tıraouı BadrОценок пока нет
- Cours 1 Les Lois de NewtonДокумент4 страницыCours 1 Les Lois de Newtonzinebben461Оценок пока нет
- Chapitre 5 Les Filtres NumériquesДокумент11 страницChapitre 5 Les Filtres NumériquesMuhammad BneijaraОценок пока нет
- ACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rДокумент4 страницыACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rBADR MTIRAOUIОценок пока нет
- Contrôle Automatique CorrigéДокумент7 страницContrôle Automatique CorrigéZakaria Bendib100% (1)
- Filtres Actifs Laii LT 1 2Документ13 страницFiltres Actifs Laii LT 1 2horra hayfaОценок пока нет
- 1 Sujet BE 1 2 3 2022 RegulДокумент6 страниц1 Sujet BE 1 2 3 2022 RegulBaptiste CapaiОценок пока нет
- Cours Commande AvancéesChapitre 1Документ10 страницCours Commande AvancéesChapitre 1Azza LaabedОценок пока нет
- TP4 Système Asservis OctaveДокумент4 страницыTP4 Système Asservis Octavebenaissa maherОценок пока нет
- Chap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxДокумент15 страницChap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxKoum SouloumОценок пока нет
- Cours SALC Ch4Документ11 страницCours SALC Ch4Licence1 espОценок пока нет
- Analyse Des SALC AutomatiqueДокумент30 страницAnalyse Des SALC AutomatiqueHachem EmptyОценок пока нет
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMДокумент7 страницTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Оценок пока нет
- Cours Logarithme NépérienДокумент3 страницыCours Logarithme NépérienYaovi Serge GatsiОценок пока нет
- TP Dut-Etk2 2016Документ6 страницTP Dut-Etk2 2016ibrazizi2000Оценок пока нет
- Cours ALEДокумент37 страницCours ALEAzze DdineОценок пока нет
- Examen 2019-2020 D'identification Et ModélisationДокумент3 страницыExamen 2019-2020 D'identification Et Modélisationarwa bouazaouiОценок пока нет
- 2.5 Systèmes Linéaires Invariant en Temps: T) Car T Tends Vers 0, Donc Nous Pouvons Réécrire (2.20) CommeДокумент8 страниц2.5 Systèmes Linéaires Invariant en Temps: T) Car T Tends Vers 0, Donc Nous Pouvons Réécrire (2.20) CommeHamdi Ben MansourОценок пока нет
- Initiation MatlabДокумент4 страницыInitiation MatlabFadila FEОценок пока нет
- Série-Trigonométrie PART (2) Prof - Elouadghiri (WWW - Pc1.ma)Документ1 страницаSérie-Trigonométrie PART (2) Prof - Elouadghiri (WWW - Pc1.ma)waleeduuk431Оценок пока нет
- TP AsservissementsДокумент5 страницTP AsservissementsibouОценок пока нет
- Synthèse de Régulateurs NumériquesДокумент15 страницSynthèse de Régulateurs NumériquesBADR MTIRAOUIОценок пока нет
- System Es As Serv IsДокумент40 страницSystem Es As Serv IsFadi DNОценок пока нет
- Td1 Auto Dic2Документ3 страницыTd1 Auto Dic2Cheikh Ibrahima Alioune SAMBOUОценок пока нет
- Rapport Dynamique de StructuresДокумент16 страницRapport Dynamique de Structuresaharchaou houdaОценок пока нет
- Rapport de Be 1Документ21 страницаRapport de Be 1gmbeltrami410Оценок пока нет
- Corrigé Epreuve Maths 2Документ5 страницCorrigé Epreuve Maths 2Franck TankeuОценок пока нет
- TD Telecommunication FondamentaleДокумент20 страницTD Telecommunication Fondamentaledz15dzОценок пока нет
- Sujet Corrige EF Maths2 ST 18-19Документ5 страницSujet Corrige EF Maths2 ST 18-19Chikhaoui AbdellahОценок пока нет
- Cours MQ SMC 2019-2020 PDFДокумент78 страницCours MQ SMC 2019-2020 PDFSimo ELyamaniОценок пока нет
- TD N°3 Commande Des Systèmes Linéaires Continus M1 CorrigéДокумент6 страницTD N°3 Commande Des Systèmes Linéaires Continus M1 CorrigéMouad ES SoubaaiОценок пока нет
- Analysefrequentielle MPДокумент42 страницыAnalysefrequentielle MPHamid BassourОценок пока нет
- Sii Mpsi s03 Cours ReptempslciДокумент52 страницыSii Mpsi s03 Cours ReptempslcidestextesecritsОценок пока нет
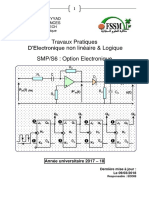
- Poly TP SMP S6 2018Документ41 страницаPoly TP SMP S6 2018ANAS ETTANANIAОценок пока нет
- Chapitre1 Mis 22Документ9 страницChapitre1 Mis 22Abderraouf BoudjemaОценок пока нет
- TP-02-Syst-Lin-ass S4 Auto.Документ4 страницыTP-02-Syst-Lin-ass S4 Auto.Djameleddine BougrineОценок пока нет
- L3 - Devoir de Traitement Du Signal - 2019 - 2020 PDFДокумент3 страницыL3 - Devoir de Traitement Du Signal - 2019 - 2020 PDFMelek LaroussiОценок пока нет
- Chapitre 6 Précision D'un Système AsserviДокумент7 страницChapitre 6 Précision D'un Système Asserviikram mbrОценок пока нет
- Chap-4 - Automatique Et CommandeДокумент34 страницыChap-4 - Automatique Et CommandeSalah FdОценок пока нет
- Chapitre 2 Interpolation PolynomialeДокумент7 страницChapitre 2 Interpolation Polynomialesifo meniaОценок пока нет
- Chapitre 5 StabilitéДокумент10 страницChapitre 5 Stabilitéikram mbrОценок пока нет
- TP Masters Mmss 2018 2019Документ14 страницTP Masters Mmss 2018 2019Sòumia ElОценок пока нет
- TD Méthodes InstrumentalesДокумент45 страницTD Méthodes InstrumentalesLatifaОценок пока нет
- Commandes Scilab Pour Prepas EctДокумент8 страницCommandes Scilab Pour Prepas EctKaoutar AbdoОценок пока нет
- TD 1234 Ts 2019-2020Документ2 страницыTD 1234 Ts 2019-2020FastislamFafaОценок пока нет
- Evaluation Finale S2 Automatique 2022Документ4 страницыEvaluation Finale S2 Automatique 2022OMAR RAHALIОценок пока нет
- Corriges Bac 2021 TsexpДокумент4 страницыCorriges Bac 2021 Tsexpmrbalmain99Оценок пока нет
- Chapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaДокумент18 страницChapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaOumaymaОценок пока нет
- Compte Rendu TP 1.seifДокумент8 страницCompte Rendu TP 1.seifSeif GuetitiОценок пока нет
- Aide Memoire MATLABДокумент3 страницыAide Memoire MATLABFrancois Mickael RakotonirinaОценок пока нет
- Interpolation bilinéaire: Amélioration de la résolution et de la clarté de l'image grâce à l'interpolation bilinéaireОт EverandInterpolation bilinéaire: Amélioration de la résolution et de la clarté de l'image grâce à l'interpolation bilinéaireОценок пока нет
- 2 Lettre de Motivation ClassiqueДокумент1 страница2 Lettre de Motivation ClassiqueSalmi AbdelkaderОценок пока нет
- 17 Lettre de Motivation ModerneДокумент1 страница17 Lettre de Motivation ModerneSalmi AbdelkaderОценок пока нет
- Blue and Yellow Flat Design Public Relations Specialist Journalism ResumeДокумент1 страницаBlue and Yellow Flat Design Public Relations Specialist Journalism ResumeSalmi AbdelkaderОценок пока нет
- CiviДокумент1 страницаCiviSalmi Abdelkader100% (2)
- IntroductionДокумент3 страницыIntroductionSalmi AbdelkaderОценок пока нет
- TP03 Capteurs Et ConditionneursДокумент1 страницаTP03 Capteurs Et ConditionneursSalmi AbdelkaderОценок пока нет
- TP1 Capteur de Température PDFДокумент1 страницаTP1 Capteur de Température PDFSalmi AbdelkaderОценок пока нет
- TP2 Detecteur de Lumière PDFДокумент1 страницаTP2 Detecteur de Lumière PDFSalmi AbdelkaderОценок пока нет
- Serie 1-S3-2019-2020Документ3 страницыSerie 1-S3-2019-2020youssef lahmidiОценок пока нет
- AsservissementsДокумент9 страницAsservissementsRiadh KhenferОценок пока нет
- Chapitre 1Документ18 страницChapitre 1LI ASОценок пока нет
- Travail Et Puissance D Une Force Exercices Non Corriges 4Документ1 страницаTravail Et Puissance D Une Force Exercices Non Corriges 4Siham Darif50% (2)
- Chapitre 6Документ33 страницыChapitre 6wokgadebanaОценок пока нет
- DecibelДокумент1 страницаDecibelDonmus2Оценок пока нет
- 04 - Système de Numération Et Conversion 2012Документ13 страниц04 - Système de Numération Et Conversion 2012kalombo100% (1)
- Math 2e AnnéeДокумент11 страницMath 2e AnnéeCirano EksОценок пока нет
- TD 3Документ17 страницTD 3Hamza HamizoОценок пока нет
- Fiche Fonctions Procedures StandardsДокумент1 страницаFiche Fonctions Procedures Standardsmontasser ismailОценок пока нет
- Capture D'écran . 2023-09-06 À 19.47.20Документ177 страницCapture D'écran . 2023-09-06 À 19.47.20Oren FitoussiОценок пока нет
- David McMahon - Quantum Mechanics Demystified-McGraw-Hill (2005) - 4Документ50 страницDavid McMahon - Quantum Mechanics Demystified-McGraw-Hill (2005) - 496mt61tr90Оценок пока нет
- tp2 Direction Assistee ElectriqueДокумент9 страницtp2 Direction Assistee Electriqueibrahim rabbajОценок пока нет
- TD1 PooДокумент2 страницыTD1 Pooahmadinfo.ticОценок пока нет
- sujet2ndHB PDFДокумент2 страницыsujet2ndHB PDFYoan BodiОценок пока нет
- Agrandissements Et Réductions 4ème Exercices Avec CorrectionДокумент1 страницаAgrandissements Et Réductions 4ème Exercices Avec Correctionevap.090910Оценок пока нет
- Composantes Du Sujet: RS2021: دادعإ El-Ouarzazi Mohamed N°: MAB3Документ4 страницыComposantes Du Sujet: RS2021: دادعإ El-Ouarzazi Mohamed N°: MAB3Nouhaila ChairОценок пока нет
- TD2 CorrigeДокумент4 страницыTD2 CorrigeLuis MohamedОценок пока нет
- Serie Volume AireДокумент2 страницыSerie Volume AireAbdeljalil Al ibrahimiОценок пока нет
- EMD ThPlast 2020 CorrigéДокумент3 страницыEMD ThPlast 2020 CorrigéImen NinaОценок пока нет
- Questionaire PSFinalДокумент17 страницQuestionaire PSFinalAnastasiaОценок пока нет
- TP MhsДокумент6 страницTP MhsWiam TerfaiОценок пока нет
- TD2 Correction Exercice5Документ5 страницTD2 Correction Exercice5samadou cscОценок пока нет
- Tic en Bac ProДокумент62 страницыTic en Bac ProHADJОценок пока нет
- TP 1 Ov (2) - ConvertiДокумент3 страницыTP 1 Ov (2) - Convertipiratraouf602Оценок пока нет
- Chapitre 3 - 3Документ4 страницыChapitre 3 - 3kamilia houdОценок пока нет