Вам также может понравиться
- BollardDetail 3Документ1 страницаBollardDetail 3aishahrahmanОценок пока нет
- A4 Drainage Design for Sydney StreetsДокумент50 страницA4 Drainage Design for Sydney StreetsKhor Tze MingОценок пока нет
- Slab Bridge Final KPJДокумент73 страницыSlab Bridge Final KPJvinoraamОценок пока нет
- Wynwood SquareДокумент48 страницWynwood SquareNone None None100% (6)
- Ultra Urban Green Infrastructure Guidelines Manual PDFДокумент110 страницUltra Urban Green Infrastructure Guidelines Manual PDFTri WahyuningsihОценок пока нет
- Introduction to Control System Performance Measurements: The Commonwealth and International Library: Automatic Control DivisionОт EverandIntroduction to Control System Performance Measurements: The Commonwealth and International Library: Automatic Control DivisionОценок пока нет
- SAFETY BARRIER TERMINAL ALIGNMENT DETAILSДокумент26 страницSAFETY BARRIER TERMINAL ALIGNMENT DETAILSyyanan1118Оценок пока нет
- Real Time Detection of Lane Markers in Urban StreetsДокумент6 страницReal Time Detection of Lane Markers in Urban Streetsjoin smithОценок пока нет
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsДокумент6 страницDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiОценок пока нет
- Chapter 3Документ30 страницChapter 3Matlab IEEEОценок пока нет
- Zhu 2021 J. Phys. Conf. Ser. 1802 032006Документ9 страницZhu 2021 J. Phys. Conf. Ser. 1802 0320063XTR3M3 ᜰ꙰ꦿ NJRОценок пока нет
- Overtaking Vehicle Detection Using Implicit Optical FlowДокумент6 страницOvertaking Vehicle Detection Using Implicit Optical FlowVm AnОценок пока нет
- Road Lane Line DetectionДокумент2 страницыRoad Lane Line DetectionAparna Kamble100% (2)
- Real-Time Mobile Robot Navigation Based On Stereo Vision and Low-Cost GPSДокумент6 страницReal-Time Mobile Robot Navigation Based On Stereo Vision and Low-Cost GPSAnimonga HajimeОценок пока нет
- Obstacle Detection Progress for UGVsДокумент14 страницObstacle Detection Progress for UGVsPrasenjit SahaОценок пока нет
- Road Damage Detection Using Satellite ImagesДокумент5 страницRoad Damage Detection Using Satellite ImagesDaniel Georgian PislaruОценок пока нет
- Lane Tracking SystemДокумент5 страницLane Tracking SystemKedarОценок пока нет
- Detection of Obstacles On Runway Using Ego-Motion Compensation and Tracking of Significant FeaturesДокумент6 страницDetection of Obstacles On Runway Using Ego-Motion Compensation and Tracking of Significant FeaturesSaeideh OraeiОценок пока нет
- Vision Based Lane Detection For Unmanned Ground Vehicle (UGV)Документ19 страницVision Based Lane Detection For Unmanned Ground Vehicle (UGV)AjayОценок пока нет
- Power line detection using Hough transform and line tracing techniquesДокумент6 страницPower line detection using Hough transform and line tracing techniqueskimalikrОценок пока нет
- Mobile Robot Navigation Using Visual OdometryДокумент6 страницMobile Robot Navigation Using Visual OdometryEbit Nur AlfianОценок пока нет
- 156 PDFДокумент6 страниц156 PDFLOVELCO SASОценок пока нет
- PlaybookДокумент2 страницыPlaybookNicoОценок пока нет
- Qualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEДокумент6 страницQualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEJulierme SilvaОценок пока нет
- Lane Tracking Methods A ReviewДокумент4 страницыLane Tracking Methods A ReviewInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Active Intrinsic Calibration Using Vanishing PointsДокумент6 страницActive Intrinsic Calibration Using Vanishing PointsRajul RahmadОценок пока нет
- Fork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningДокумент7 страницFork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningnasyirtamaraОценок пока нет
- Mobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationДокумент8 страницMobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationArtur Faby Jimenez BonillaОценок пока нет
- Lane Detection and Autonomous Driving Control Systems Using Neural Network On Video Games SimulationДокумент5 страницLane Detection and Autonomous Driving Control Systems Using Neural Network On Video Games SimulationKuncoro Triandono MuktiОценок пока нет
- Vertical Lane Line Detection Technology Based On Hough TransformДокумент7 страницVertical Lane Line Detection Technology Based On Hough Transformpepethefrogg45Оценок пока нет
- Williem Fast and Robust 2014 CVPR Paper PDFДокумент2 страницыWilliem Fast and Robust 2014 CVPR Paper PDFAnang PrasetyoОценок пока нет
- Composite Real-Time Image Processing For Railways Track Profile MeasurementДокумент6 страницComposite Real-Time Image Processing For Railways Track Profile MeasurementhmdzОценок пока нет
- Nassu11 - Rail Extraction For Driver Support in RailwaysДокумент6 страницNassu11 - Rail Extraction For Driver Support in RailwaysMario BarbarossaОценок пока нет
- Bresler Prusa Hlavac ICFHR 2016 - 3Документ6 страницBresler Prusa Hlavac ICFHR 2016 - 3HuyОценок пока нет
- An Approach For Utility Pole Recognition in Real Conditions: Lecture Notes in Computer Science January 2014Документ10 страницAn Approach For Utility Pole Recognition in Real Conditions: Lecture Notes in Computer Science January 2014Reo DeraОценок пока нет
- A Study For Agv Steering Control and Identification Using VisionДокумент4 страницыA Study For Agv Steering Control and Identification Using VisionraghulОценок пока нет
- Runway Detection and Tracking For UAV Based On Canny Algothm 2012Документ4 страницыRunway Detection and Tracking For UAV Based On Canny Algothm 2012Sebastian Miguel Cáceres HuamánОценок пока нет
- Franke 1998Документ9 страницFranke 1998Ilias KamalОценок пока нет
- Laser Best ReviewДокумент17 страницLaser Best ReviewEric AntoineОценок пока нет
- Robust Lane Detection and Tracking Algorithm For SДокумент19 страницRobust Lane Detection and Tracking Algorithm For SDuong DangОценок пока нет
- Body Guided Camera CalibrationДокумент6 страницBody Guided Camera CalibrationEanesОценок пока нет
- Orb ProsacДокумент6 страницOrb ProsacAnshuman GhughutiyalОценок пока нет
- R-CNN Pedestrian Detection with Class-Specific Region ProposalsДокумент4 страницыR-CNN Pedestrian Detection with Class-Specific Region ProposalsAkshay KagwadeОценок пока нет
- Realtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic EnvironmentsДокумент6 страницRealtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic Environmentsestraj1954Оценок пока нет
- Vol 1 No 4 Page 390 To 394Документ5 страницVol 1 No 4 Page 390 To 394Arindam das modakОценок пока нет
- Lane Boundary Detection Using Open CVДокумент16 страницLane Boundary Detection Using Open CVRonny CortezОценок пока нет
- Multi-Source Image Registration Based On Log-Polar Coordinates and Extension Phase Correlation PDFДокумент7 страницMulti-Source Image Registration Based On Log-Polar Coordinates and Extension Phase Correlation PDFivy_publisherОценок пока нет
- Lane Line Detection Using Hough Transform (Pipeling For Videos)Документ18 страницLane Line Detection Using Hough Transform (Pipeling For Videos)Sourav DeyОценок пока нет
- Train CollisionДокумент6 страницTrain CollisionVicky LeakersОценок пока нет
- sensors-23-00789Документ21 страницаsensors-23-00789varbash1419Оценок пока нет
- Shadowed LaneДокумент7 страницShadowed LaneAshutosh PandeyОценок пока нет
- Vision-Based Extrapolation of Road Lane Lines inДокумент4 страницыVision-Based Extrapolation of Road Lane Lines invenkat pОценок пока нет
- 2011 Gedrange ElmfДокумент6 страниц2011 Gedrange ElmfMario BarbarossaОценок пока нет
- A Real-Time Lane Extraction System For The Wheelchair Robot: Xiaojun Qi and Yinbing GeДокумент4 страницыA Real-Time Lane Extraction System For The Wheelchair Robot: Xiaojun Qi and Yinbing GeMurat ArarОценок пока нет
- Obstacle Detection Using Hough Transform: Elated WorkДокумент4 страницыObstacle Detection Using Hough Transform: Elated WorkFloyd ClarkeОценок пока нет
- Study On Lane Detection Applide Image ProcessingДокумент50 страницStudy On Lane Detection Applide Image ProcessingMohd KasranОценок пока нет
- Automated traffic signals using object trackingДокумент5 страницAutomated traffic signals using object trackingSyed Imad AhmedОценок пока нет
- Obstacle Detection and Classification Using Deep Learning For Tracking in High-Speed Autonomous DrivingДокумент6 страницObstacle Detection and Classification Using Deep Learning For Tracking in High-Speed Autonomous DrivingthepangeliusОценок пока нет
- Real - Time Lane Detection For Autonomous VehicleДокумент6 страницReal - Time Lane Detection For Autonomous Vehiclenalin_gupta_1Оценок пока нет
- CGAДокумент8 страницCGARYZEN OPОценок пока нет
- Real-Time Image Processing Applied To Traffic-Queue Detection AlgorithmДокумент18 страницReal-Time Image Processing Applied To Traffic-Queue Detection AlgorithmAnoop RaviОценок пока нет
- IVC - Lane Detection and Tracking Using BsnakeДокумент12 страницIVC - Lane Detection and Tracking Using BsnakeamitsbhatiОценок пока нет
- Presented By: Arz Kumar Satsangi & Vineet VermaДокумент26 страницPresented By: Arz Kumar Satsangi & Vineet VermagarunanarasОценок пока нет
- ,DanaInfo Ieeexplore Ieee Org+00933063Документ6 страниц,DanaInfo Ieeexplore Ieee Org+00933063Mohd TajjudinОценок пока нет
- ADAS using Traffic Sign Detection and Lane Deviation AnalysisДокумент7 страницADAS using Traffic Sign Detection and Lane Deviation AnalysisNaseef KadengalОценок пока нет
- Roads transport advantages & disadvantagesДокумент12 страницRoads transport advantages & disadvantagessreendd50% (2)
- Legend 2002 ManualДокумент25 страницLegend 2002 ManualAlex Medrano RamirezОценок пока нет
- Otmp Mainscript 05072004Документ19 страницOtmp Mainscript 05072004bhaskarОценок пока нет
- Site Weekly Observation ReportДокумент20 страницSite Weekly Observation Reportbra9tee9tiniОценок пока нет
- BS EN 1343 Kerbs of Natural Stone For External Paving - Requirements and Test MethodsДокумент28 страницBS EN 1343 Kerbs of Natural Stone For External Paving - Requirements and Test MethodsEliane ToumaОценок пока нет
- Advanced Corridor Design in Civil 3DДокумент41 страницаAdvanced Corridor Design in Civil 3DJigneshОценок пока нет
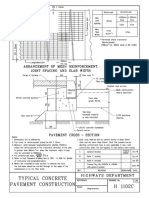
- Typical Concrete H 1102C: Arrangement of Mesh ReinforcementДокумент1 страницаTypical Concrete H 1102C: Arrangement of Mesh ReinforcementTsz Yu WanОценок пока нет
- Irc 6 2010Документ82 страницыIrc 6 2010suvraОценок пока нет
- JDP Comm Road-BuildingДокумент29 страницJDP Comm Road-BuildingAhmed ProlicОценок пока нет
- May 20, 2011 Strathmore TimesДокумент28 страницMay 20, 2011 Strathmore TimesStrathmore TimesОценок пока нет
- Kerbs & Inl SpecДокумент4 страницыKerbs & Inl Specabdulrehman731Оценок пока нет
- Group AssignmentДокумент20 страницGroup AssignmentJoshi ChumbaleОценок пока нет
- HEC-22, 3rd Edition Urban Drainage Design Manual: InletsДокумент62 страницыHEC-22, 3rd Edition Urban Drainage Design Manual: InletsMateo CoralОценок пока нет
- Traffic Calming Measures - Review and Analysis: Working PaperДокумент31 страницаTraffic Calming Measures - Review and Analysis: Working PaperVenkateshОценок пока нет
- British Standard Kerb: Product InformationДокумент6 страницBritish Standard Kerb: Product InformationAhmed ShakerОценок пока нет
- King Audit ReportДокумент6 страницKing Audit Reportapi-202194755Оценок пока нет
- UKROI-KPC Kerb and Gully Range SmallДокумент12 страницUKROI-KPC Kerb and Gully Range SmallMihaela TodiricaОценок пока нет
- Vadapalani Metro Station Chennai AIC Access Audit ReportДокумент48 страницVadapalani Metro Station Chennai AIC Access Audit ReportDisability Rights AllianceОценок пока нет
- Module 2 1Документ142 страницыModule 2 1Pankaj N ReddyОценок пока нет
- Depth Semantic Segmentation InstructionsДокумент9 страницDepth Semantic Segmentation InstructionsAivan Dredd PunzalanОценок пока нет
- Highway Kerbing DetailsДокумент11 страницHighway Kerbing DetailsAnkit AgrawalОценок пока нет
- ASTMC Actual S-Curve Erwin 01-20-15Документ69 страницASTMC Actual S-Curve Erwin 01-20-15Dick Anthony MabaoОценок пока нет
- EEC PPT 22627Документ20 страницEEC PPT 22627gopalbhavsar411Оценок пока нет
- Cma Concrete Block Paving Technical Note For Steep Slopes 2016 03 PDFДокумент6 страницCma Concrete Block Paving Technical Note For Steep Slopes 2016 03 PDFAljosa NikolicОценок пока нет