Вам также может понравиться
- Praticas Consolidadas PDFДокумент38 страницPraticas Consolidadas PDFAnderson GuedesОценок пока нет
- Prática LaboratorialДокумент2 страницыPrática LaboratorialKleiber FerreiraОценок пока нет
- Prática 5Документ10 страницPrática 5Anderson Guedes100% (1)
- Prática 2Документ7 страницPrática 2Anderson GuedesОценок пока нет
- Pratica 1Документ5 страницPratica 1Anderson Guedes100% (1)
- Prática 6Документ8 страницPrática 6Anderson GuedesОценок пока нет
- Relatorio Prática n919060 4Документ2 страницыRelatorio Prática n919060 4ALESSANDRO DIAS SANTOS0% (1)
- ACQA 6° SEMANA Relatório Instrumentação IndustrialДокумент16 страницACQA 6° SEMANA Relatório Instrumentação IndustrialFábio Nember Miranda100% (6)
- Relatório de Prática - Instrumentação Industrial - REV04Документ12 страницRelatório de Prática - Instrumentação Industrial - REV04David Souza MedeirosОценок пока нет
- Relatório de Pràtica Analogica IIДокумент8 страницRelatório de Pràtica Analogica IIRENNANОценок пока нет
- Relatório de Prática - Instrumentação Industrial - REV00Документ6 страницRelatório de Prática - Instrumentação Industrial - REV00David Souza Medeiros100% (1)
- Fluxo de Potência No Power World CleberДокумент6 страницFluxo de Potência No Power World CleberCleber RodriguesОценок пока нет
- Lista 1 Convers o de EnergiaДокумент21 страницаLista 1 Convers o de EnergiaLeonardo França100% (1)
- Relatório de Práticas - Anderson B DinizДокумент22 страницыRelatório de Práticas - Anderson B DinizAnderson Diniz100% (1)
- Roteiros Conversão Energia PDFДокумент40 страницRoteiros Conversão Energia PDFLucas CesarОценок пока нет
- 1° Lista de Exercícios - Rev1Документ6 страниц1° Lista de Exercícios - Rev1Fernando Henrique100% (1)
- Gabriel Ricci 1018035 Pratica 919063 PDFДокумент20 страницGabriel Ricci 1018035 Pratica 919063 PDFWendel OliveiraОценок пока нет
- Relatório Eletricadade - Potencia ElétricaДокумент16 страницRelatório Eletricadade - Potencia ElétricaDjhow LordОценок пока нет
- 14 Pratica 6 Curva Caracteristica MOSFET 2018 3Документ4 страницы14 Pratica 6 Curva Caracteristica MOSFET 2018 3Bruno MartinsОценок пока нет
- Circuitos Lista RespostasfinalДокумент37 страницCircuitos Lista RespostasfinalRicardoAmaralОценок пока нет
- Prática 919065-1 Automação Industrial IIДокумент6 страницPrática 919065-1 Automação Industrial IIVictor Luiz0% (1)
- Relatório - Exp5 - Ensaios Com Máquina Síncrona Trifásica - Máquinas Elétricas - Trim4.1Документ7 страницRelatório - Exp5 - Ensaios Com Máquina Síncrona Trifásica - Máquinas Elétricas - Trim4.1Fernando Henrique G. ZucatelliОценок пока нет
- Relatório 01 - Potência e Correção Do Fator de PotênciaДокумент7 страницRelatório 01 - Potência e Correção Do Fator de PotênciaRafael Hoffmann100% (1)
- Manual de LorenzoДокумент13 страницManual de LorenzoAdriel FanhaneОценок пока нет
- Exercicios Zener e ReguladorДокумент10 страницExercicios Zener e ReguladorPlinioSantosОценок пока нет
- Leitura 5 - Aplicações Do SCRДокумент12 страницLeitura 5 - Aplicações Do SCRAlessandro PaulinОценок пока нет
- ATIVIDADE PRÁTICA ELETRICIDADE UNINTER - Passei Direto 02Документ9 страницATIVIDADE PRÁTICA ELETRICIDADE UNINTER - Passei Direto 02juliano cardoso100% (1)
- Relatorio Circuitos Teorema de BlondelДокумент4 страницыRelatorio Circuitos Teorema de BlondelMaria Eduarda LeãoОценок пока нет
- ExercíciosCE2011 2Документ12 страницExercíciosCE2011 2thifany100% (1)
- Lista de Exercícios I ConversãoДокумент11 страницLista de Exercícios I ConversãoDeby NFerОценок пока нет
- EletronicaДокумент30 страницEletronicaJuliano MartinsОценок пока нет
- Aulas Práticas Eletronica Digital I PDFДокумент35 страницAulas Práticas Eletronica Digital I PDFVictor CamposОценок пока нет
- Relatório 01 - Curva Característica Do DiodoДокумент3 страницыRelatório 01 - Curva Característica Do DiodoThayná MorimОценок пока нет
- Aplicações Práticas Com LM741Документ8 страницAplicações Práticas Com LM741Leonardo VerçozaОценок пока нет
- Simulacao Circuito MagnéticoДокумент2 страницыSimulacao Circuito MagnéticoJeferson PaulistaОценок пока нет
- 6-Controle-I-Analogia de Sistemas Mecânicos e Elétricos PDFДокумент23 страницы6-Controle-I-Analogia de Sistemas Mecânicos e Elétricos PDFLucas NunesОценок пока нет
- Trabalho LogДокумент6 страницTrabalho LogAntônio José Portela de Jesus SantosОценок пока нет
- Retificador Monofásico Controlado de Onda Completa Com Carga ResistivaДокумент14 страницRetificador Monofásico Controlado de Onda Completa Com Carga ResistivaThais FujitaОценок пока нет
- Eletrônica Analógica Unidade 2Документ26 страницEletrônica Analógica Unidade 2Marco Aurelio SantosОценок пока нет
- Lista de Exercícios Mosfet 2018/2Документ6 страницLista de Exercícios Mosfet 2018/2my name is ninguemОценок пока нет
- Apostila SEPДокумент41 страницаApostila SEPAllanBorges100% (1)
- Atividade de Pesquisa 01Документ6 страницAtividade de Pesquisa 01Juliano MartinsОценок пока нет
- Exercícios Sobre Filtros PassivosДокумент2 страницыExercícios Sobre Filtros PassivosMaitsudá Matos100% (1)
- Cap II Circuitos MagneticosДокумент24 страницыCap II Circuitos MagneticosepaeseОценок пока нет
- Relatório - Exp5 - Amplificadores de Pequenos Sinais - Fundamentos de Eletrônica - Trim3.2Документ14 страницRelatório - Exp5 - Amplificadores de Pequenos Sinais - Fundamentos de Eletrônica - Trim3.2Fernando Henrique G. ZucatelliОценок пока нет
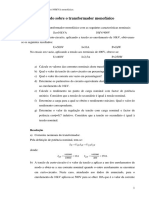
- Problema Resolvido Sobre o Transformador Monofasico PDFДокумент5 страницProblema Resolvido Sobre o Transformador Monofasico PDFCalisto Alberto100% (1)
- Atividade Prática - Sensores Elétricos e EletrônicosДокумент2 страницыAtividade Prática - Sensores Elétricos e EletrônicosRoger FerreiraОценок пока нет
- Lista 2 - TransformadoresДокумент4 страницыLista 2 - TransformadoresMatheus GoncalvesОценок пока нет
- Exercícios CAДокумент4 страницыExercícios CADiego Rocha0% (1)
- Relatório 6 de Eletrônica AnalógicaДокумент11 страницRelatório 6 de Eletrônica AnalógicaJoão Pedro da Silva RodriguesОценок пока нет
- Relatório - Leis de OhmДокумент3 страницыRelatório - Leis de OhmMaurício MarianoОценок пока нет
- Microsoft Word - Prova EletricistaB - 2Документ16 страницMicrosoft Word - Prova EletricistaB - 2Herbert OliveiraОценок пока нет
- Apostila Máquinas Elétricas IFCE Pecém - Cap8Документ30 страницApostila Máquinas Elétricas IFCE Pecém - Cap8Wagner Menezes100% (1)
- Lista de Exercícios Relação de Transformação - Soluções-Abe895448fd94 6uiEIouДокумент53 страницыLista de Exercícios Relação de Transformação - Soluções-Abe895448fd94 6uiEIou4lan808Оценок пока нет
- Relatorio de Atividade Pratica Circuito LogicoДокумент11 страницRelatorio de Atividade Pratica Circuito LogicoJose Wilson Soares Do NascimentoОценок пока нет
- Desenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Luxímetro Com PicОт EverandDesenvolvendo Um Datalogger E Armazenando No Arquivo Formato Csv Para Medir Luxímetro Com PicОценок пока нет
- ENTRAN Folder Trifasicos Industriais FEV18Документ4 страницыENTRAN Folder Trifasicos Industriais FEV18HENRIQUEОценок пока нет
- Lista de Exercícios RegressãoДокумент7 страницLista de Exercícios RegressãoEverton OliveiraОценок пока нет
- APOSTILA - Acionamentos Elétricos - Cap. 3 - Potência Dos Motores Elétricos e AquecimentoДокумент50 страницAPOSTILA - Acionamentos Elétricos - Cap. 3 - Potência Dos Motores Elétricos e Aquecimentopcalmeida100% (1)
- Analise Nir FoliarДокумент8 страницAnalise Nir FoliarPaloma SiqueiraОценок пока нет
- Secagem Da MadeiraДокумент6 страницSecagem Da MadeiraromeckingОценок пока нет
- Mecanoquímica Cordierita Espinélio MarinhaДокумент10 страницMecanoquímica Cordierita Espinélio MarinhaFrancisco Manoel dos Santos Garrido GarridoОценок пока нет
- Relatório de Ensaio de Compactação Proctor NormalДокумент3 страницыRelatório de Ensaio de Compactação Proctor NormalMari Moreira100% (1)
- Trabalho de Química Básica - Nelcia Da Isabel MabetanaДокумент23 страницыTrabalho de Química Básica - Nelcia Da Isabel Mabetanazeca jose noaОценок пока нет
- 1579182062diario Do Cha Ebook 5 Receitas de Drinks ChaДокумент16 страниц1579182062diario Do Cha Ebook 5 Receitas de Drinks Chadébora_diniz_65Оценок пока нет
- Tabela de FurosДокумент10 страницTabela de FurosBRUNO MORAESОценок пока нет
- Semco Catalogo Misturadores EstaticosДокумент2 страницыSemco Catalogo Misturadores Estaticosnewttonsantos100% (1)
- Argila ExpandidaДокумент6 страницArgila ExpandidaAluizio AlvesОценок пока нет
- Aula Do Cap16 MHS OscilaçõesДокумент35 страницAula Do Cap16 MHS OscilaçõesEng. Marcus Vinicius MartinsОценок пока нет
- Ebook Renda ExtraДокумент14 страницEbook Renda ExtraMonalizaОценок пока нет
- Controle de Produtividade Com DesenhoДокумент1 страницаControle de Produtividade Com Desenhoalessandro samuelОценок пока нет
- 2 Lista de Exerc Movimento CircularДокумент3 страницы2 Lista de Exerc Movimento CircularMatheus SouzaОценок пока нет
- E Book Revisao de Vespera Petrobras Engenharia MecanicaДокумент55 страницE Book Revisao de Vespera Petrobras Engenharia MecanicaRogerio Lucas RosaОценок пока нет
- Lista Mecânica Dos FluidosДокумент19 страницLista Mecânica Dos FluidosAna Paula Teixeira100% (1)
- Lista de Exercicios Kanban 1 - 11Документ1 страницаLista de Exercicios Kanban 1 - 11GustavoAvilla۞Оценок пока нет
- 1º Relatório Mensal de Monitoramento de Água Rev1Документ31 страница1º Relatório Mensal de Monitoramento de Água Rev1Lucas GonçalvesОценок пока нет
- UNI3000FДокумент40 страницUNI3000FKelvin MarcelinoОценок пока нет
- Teste Gramática 6Документ13 страницTeste Gramática 6Isabel Palmela100% (1)
- Aula 3Документ61 страницаAula 3Rafaela BiancaОценок пока нет
- Tolerância Dimensional (SENAI) PDFДокумент25 страницTolerância Dimensional (SENAI) PDFUILSONJR100% (2)
- Datasheet UC30-21416A 6054710 PTДокумент7 страницDatasheet UC30-21416A 6054710 PTElian SilvaОценок пока нет
- MPC2 ProgramaçãoДокумент24 страницыMPC2 ProgramaçãoLuTango de DeusОценок пока нет
- Ângulos e Medidas OrtopédicasДокумент9 страницÂngulos e Medidas Ortopédicasdaniboy_007Оценок пока нет
- Aula 3.2 Aplicação Das Proteases Nos AlimentosДокумент33 страницыAula 3.2 Aplicação Das Proteases Nos AlimentosAdriana Cibele Mesquita DantasОценок пока нет
- Pavimentações - DicasДокумент7 страницPavimentações - DicasAna Cristina Colaço DiasОценок пока нет
- Vestimenta Anti-ChamasДокумент26 страницVestimenta Anti-ChamasCleitonОценок пока нет