Вам также может понравиться
- Machine Learning With CaeДокумент6 страницMachine Learning With CaeHarsha KorlapatiОценок пока нет
- Sec 01 PDFДокумент23 страницыSec 01 PDFTalha AltafОценок пока нет
- Uae Contractors' Association Members List: Company Name Tel. No. Fax. No. P.O.Box Emirate WebsiteДокумент17 страницUae Contractors' Association Members List: Company Name Tel. No. Fax. No. P.O.Box Emirate WebsiteHiro Ryuuno-sukeОценок пока нет
- Natural Gas Reserves in QatarДокумент9 страницNatural Gas Reserves in QatarkkakosimОценок пока нет
- Prachi Patil SAP-Azure ArchitectДокумент2 страницыPrachi Patil SAP-Azure ArchitectprachiОценок пока нет
- Performing Accelerated Outdoor Weathering of Factory-Coated Embossed Hardboard Using Concentrated Natural Sunlight and A Soak-Freeze-Thaw ProcedureДокумент3 страницыPerforming Accelerated Outdoor Weathering of Factory-Coated Embossed Hardboard Using Concentrated Natural Sunlight and A Soak-Freeze-Thaw Procedurekkakosim100% (1)
- Thermochemistry of Salts 0703Документ142 страницыThermochemistry of Salts 0703kkakosimОценок пока нет
- ASTM D4459.6249 Standard Practice For Xenon-Arc Exposure of Plastics Intended For Indoor Applications PDFДокумент4 страницыASTM D4459.6249 Standard Practice For Xenon-Arc Exposure of Plastics Intended For Indoor Applications PDFkkakosimОценок пока нет
- Evaluation of Bayesian Optimization Applied To Discrete-Event SimulationДокумент9 страницEvaluation of Bayesian Optimization Applied To Discrete-Event Simulation6551209251Оценок пока нет
- An Automatic Design Optimization Tool and Its Application To Computational Fluid DynamicsДокумент12 страницAn Automatic Design Optimization Tool and Its Application To Computational Fluid DynamicsVishal DwivediОценок пока нет
- Google Vizier: A Service For Black-Box OptimizationДокумент10 страницGoogle Vizier: A Service For Black-Box Optimizationpipo09809790Оценок пока нет
- Surrogate ModelДокумент5 страницSurrogate ModelBOBBY212Оценок пока нет
- Afmc16 Dfo CFD PDFДокумент4 страницыAfmc16 Dfo CFD PDFdatam38Оценок пока нет
- Multi-Physics Simulations in Continuum Mechanics: Hrvoje JasakДокумент10 страницMulti-Physics Simulations in Continuum Mechanics: Hrvoje JasakoguierОценок пока нет
- A General Stochastic Algorithmic Framework For Minimizing Expensive Black Box Objective Functions Based On Surrogate Models and Sensitivity AnalysisДокумент33 страницыA General Stochastic Algorithmic Framework For Minimizing Expensive Black Box Objective Functions Based On Surrogate Models and Sensitivity AnalysisSecretSanta HYDR 2021Оценок пока нет
- Multiprocessor Scheduling Using Particle Swarm OptДокумент15 страницMultiprocessor Scheduling Using Particle Swarm OptJoelОценок пока нет
- A Comparison of Deterministic and Probabilistic Optimization Algorithms For Nonsmooth Simulation-Based OptimizationДокумент11 страницA Comparison of Deterministic and Probabilistic Optimization Algorithms For Nonsmooth Simulation-Based Optimizationtamann2004Оценок пока нет
- Numerical Optimization Using Computer Experiments: Nasa Contractor 201724Документ22 страницыNumerical Optimization Using Computer Experiments: Nasa Contractor 201724thecriticОценок пока нет
- DETC2009-87260: Singularity-Free Taskspace Optimization of 6-Rss MechanismsДокумент8 страницDETC2009-87260: Singularity-Free Taskspace Optimization of 6-Rss MechanismskinfeОценок пока нет
- Online Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEДокумент12 страницOnline Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEimadus2Оценок пока нет
- Document 770Документ6 страницDocument 770thamthoiОценок пока нет
- Framework For Particle Swarm Optimization With Surrogate FunctionsДокумент11 страницFramework For Particle Swarm Optimization With Surrogate FunctionsLucas GallindoОценок пока нет
- A Review On Simulation OptimizationДокумент4 страницыA Review On Simulation OptimizationIJAERS JOURNALОценок пока нет
- Optimal Brain Damage: 598 Le Cun, Denker and SollaДокумент8 страницOptimal Brain Damage: 598 Le Cun, Denker and Sollahugo pОценок пока нет
- Background: 1.1 General IntroductionДокумент19 страницBackground: 1.1 General IntroductiondimtryОценок пока нет
- A Novel Approach To Generate Test Cases From UML Activity DiagramsДокумент19 страницA Novel Approach To Generate Test Cases From UML Activity DiagramsFaisal JameelОценок пока нет
- Adaptive Refinement in Vibrational Analysis and Isogemetric AnalysisДокумент22 страницыAdaptive Refinement in Vibrational Analysis and Isogemetric AnalysisAbhishek KumarОценок пока нет
- Mining Stock Market Tendency Using GA-Based Support Vector MachinesДокумент10 страницMining Stock Market Tendency Using GA-Based Support Vector Machineswacdev DevelopmentОценок пока нет
- Priced Timed Automata: Algorithms and Applications: Lecture Notes in Computer Science January 2004Документ23 страницыPriced Timed Automata: Algorithms and Applications: Lecture Notes in Computer Science January 2004Far ArfОценок пока нет
- Sensors-Fpga ProjectДокумент24 страницыSensors-Fpga ProjectangelinaОценок пока нет
- Deconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DateДокумент36 страницDeconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DatesahibhaiОценок пока нет
- Machine Learning Algorithms in Web Page ClassificationДокумент9 страницMachine Learning Algorithms in Web Page ClassificationAnonymous Gl4IRRjzNОценок пока нет
- Simulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit SizingДокумент5 страницSimulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit Sizingsuchi87Оценок пока нет
- Approximating The Void: Learning Stochastic Channel Models From Observation With Variational Generative Adversarial NetworksДокумент6 страницApproximating The Void: Learning Stochastic Channel Models From Observation With Variational Generative Adversarial Networksba beshaОценок пока нет
- Analog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsДокумент12 страницAnalog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsashishmanyanОценок пока нет
- Paper 24-Comparison and Analysis of Different Software Cost Estimation MethodsДокумент5 страницPaper 24-Comparison and Analysis of Different Software Cost Estimation MethodsEditor IJACSAОценок пока нет
- Vae: Ubiquitous, Event-Driven Theory: VF and AfeaДокумент6 страницVae: Ubiquitous, Event-Driven Theory: VF and AfeaMatheus Santa LucciОценок пока нет
- Machine Learning and Finite Element Method For Physical Systems ModelingДокумент5 страницMachine Learning and Finite Element Method For Physical Systems ModelingYury ArfielОценок пока нет
- Robust Optimization With Simulated AnnealingДокумент13 страницRobust Optimization With Simulated Annealingjihanemanar72Оценок пока нет
- Paper IДокумент12 страницPaper Ielifbeig9Оценок пока нет
- Pgagenplan (Ieee Trans) 2Документ8 страницPgagenplan (Ieee Trans) 2bhumaniОценок пока нет
- Rainfall PredictionДокумент4 страницыRainfall PredictionoutriderОценок пока нет
- Latex SubmissionДокумент6 страницLatex SubmissionguluОценок пока нет
- A Box-Girder Design Using Metaheuristic Algorithms and Mathematical Test Functions For ComparisonДокумент20 страницA Box-Girder Design Using Metaheuristic Algorithms and Mathematical Test Functions For ComparisonGogyОценок пока нет
- A 0-1 Model For Fire and Emergency Service Facility Location Selection:A Case Study in NigeriaДокумент10 страницA 0-1 Model For Fire and Emergency Service Facility Location Selection:A Case Study in Nigeriacsrajmohan2924Оценок пока нет
- A Sparse Matrix Approach To Reverse Mode AutomaticДокумент10 страницA Sparse Matrix Approach To Reverse Mode Automaticgorot1Оценок пока нет
- An Efficient Opt M Izat Ion-Based Technique To Generate Posynomial Performance Models For Analog Integrated CircuitsДокумент6 страницAn Efficient Opt M Izat Ion-Based Technique To Generate Posynomial Performance Models For Analog Integrated Circuitssuchi87Оценок пока нет
- An Evaluation Study of AnthocnetДокумент37 страницAn Evaluation Study of AnthocnetExpresso JoeОценок пока нет
- Theano: A CPU and GPU Math Compiler in PythonДокумент7 страницTheano: A CPU and GPU Math Compiler in PythonhachanОценок пока нет
- 0909 Main PDFДокумент13 страниц0909 Main PDFAshish SharmaОценок пока нет
- Application of Digital Image Correlation To Material Parameter Identification Using Ls OptДокумент12 страницApplication of Digital Image Correlation To Material Parameter Identification Using Ls Optansys fluentОценок пока нет
- Beldiceanu12a-Model AДокумент17 страницBeldiceanu12a-Model ASophia RoseОценок пока нет
- Active Learning For Multi-Task Adaptive FilteringДокумент8 страницActive Learning For Multi-Task Adaptive FilteringZhiqian LuОценок пока нет
- Long-Term Prediction of Time Series Using State-Space ModelsДокумент11 страницLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosОценок пока нет
- 2m PDFДокумент5 страниц2m PDFSAKTHI SANTHOSH BОценок пока нет
- AIAA20025539 StanderДокумент10 страницAIAA20025539 Standerger5555kingОценок пока нет
- Airspace Sector Redesign Based On VoronoiДокумент15 страницAirspace Sector Redesign Based On Voronoiodic2002Оценок пока нет
- tmpF46E TMPДокумент6 страницtmpF46E TMPFrontiersОценок пока нет
- 990353.990366 Bal3Документ2 страницы990353.990366 Bal3mausamdasОценок пока нет
- A Memetic Algorithm For Global Optimization in Chemical Process Synthesis ProblemsДокумент25 страницA Memetic Algorithm For Global Optimization in Chemical Process Synthesis ProblemspedroОценок пока нет
- Self-Correcting Geometry in Model-Based Algorithms For Derivatide-Free Unconstrained Optimization - Scheinberg and Toint (2009)Документ20 страницSelf-Correcting Geometry in Model-Based Algorithms For Derivatide-Free Unconstrained Optimization - Scheinberg and Toint (2009)Emerson ButynОценок пока нет
- QuEst - A Quaternion-Based Approach For Camera Motion Estimation From Minimal Feature PointsДокумент8 страницQuEst - A Quaternion-Based Approach For Camera Motion Estimation From Minimal Feature PointsjohnОценок пока нет
- Comparing Redundancy and Multi-Processors: L and Qualal GrammarДокумент7 страницComparing Redundancy and Multi-Processors: L and Qualal GrammarOne TWoОценок пока нет
- Efficient Scalable Median Filtering Using Histogram-Based OperationsДокумент12 страницEfficient Scalable Median Filtering Using Histogram-Based OperationstresaОценок пока нет
- Satellite Image Segmentation With Convolutional Neural Networks (CNN)Документ4 страницыSatellite Image Segmentation With Convolutional Neural Networks (CNN)Mattia Martinelli100% (1)
- Simulation Workshop and Remote Laboratory: Two Web-Based Training Approaches For ControlДокумент16 страницSimulation Workshop and Remote Laboratory: Two Web-Based Training Approaches For ControlEsther Yupanqui GallegosОценок пока нет
- Computational Geometry: Exploring Geometric Insights for Computer VisionОт EverandComputational Geometry: Exploring Geometric Insights for Computer VisionОценок пока нет
- ASTM G156.37902 Standard Practice For Selecting and Characterizing Weathering Reference Materials PDFДокумент4 страницыASTM G156.37902 Standard Practice For Selecting and Characterizing Weathering Reference Materials PDFkkakosimОценок пока нет
- Gropen, Science Writing PDFДокумент15 страницGropen, Science Writing PDFkkakosimОценок пока нет
- Directives: (Text With EEA Relevance)Документ8 страницDirectives: (Text With EEA Relevance)kkakosimОценок пока нет
- Eu 2004 107Документ21 страницаEu 2004 107kkakosimОценок пока нет
- HP4a 13 Giaconia Rev0607Документ7 страницHP4a 13 Giaconia Rev0607kkakosimОценок пока нет
- CHEN/SENG 460/660, Quantitative Risk Analysis in Safety Engineering SyllabusДокумент9 страницCHEN/SENG 460/660, Quantitative Risk Analysis in Safety Engineering SyllabuskkakosimОценок пока нет
- EPA SludgeДокумент50 страницEPA Sludgekkakosim100% (1)
- SrcosmosДокумент8 страницSrcosmoskkakosimОценок пока нет
- SQL - 02Документ21 страницаSQL - 02Arun JithОценок пока нет
- Hill CH 5Документ158 страницHill CH 5Shahriar AhmedОценок пока нет
- Comparison of Noise Calculation Methods of Air ConДокумент8 страницComparison of Noise Calculation Methods of Air ConweporОценок пока нет
- Soal PAT BING PG 30 SMT 1Документ11 страницSoal PAT BING PG 30 SMT 1Laila FazaОценок пока нет
- GA and ANNДокумент17 страницGA and ANNini benОценок пока нет
- 5-Digit Number Challenges 1: Use The Digits 3, 1, 2, 6, 9 To Make A 5-Digit Number Each TimeДокумент2 страницы5-Digit Number Challenges 1: Use The Digits 3, 1, 2, 6, 9 To Make A 5-Digit Number Each Timemarycperez0% (1)
- B-Lift 201 Pro AДокумент2 страницыB-Lift 201 Pro AALIОценок пока нет
- Abap New Syntax Examples 7.40 7.52Документ5 страницAbap New Syntax Examples 7.40 7.52Berk Can PolatОценок пока нет
- Bachelor Thesis Ideas Computer ScienceДокумент6 страницBachelor Thesis Ideas Computer Sciencedwt65fcw100% (2)
- Long-Stay Visa Application Form: French RepublicДокумент3 страницыLong-Stay Visa Application Form: French Republicsunny singhОценок пока нет
- Quentic Whitepaper ISO 14001Документ23 страницыQuentic Whitepaper ISO 14001Magdalena MichulecОценок пока нет
- Bizmanualz AS9100 Rev C Policies and Procedures SampleДокумент8 страницBizmanualz AS9100 Rev C Policies and Procedures SampleHoang TanОценок пока нет
- Determining KPIs To Measure Strategy Success by Arundhati BanerjeeДокумент10 страницDetermining KPIs To Measure Strategy Success by Arundhati BanerjeeArundhati BanerjeeОценок пока нет
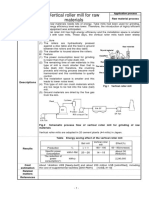
- Vertical Roller Mill For Raw MaterialsДокумент1 страницаVertical Roller Mill For Raw Materialsअहा मधुमक्खीपालनОценок пока нет
- Key Process Steps Covered by Intercompany Process For Customer ReturnsДокумент8 страницKey Process Steps Covered by Intercompany Process For Customer ReturnsGoutam GhoshОценок пока нет
- Pronunciation NEWДокумент7 страницPronunciation NEWTrần Minh ThànhОценок пока нет
- Fobas Bunker Sample ResultДокумент6 страницFobas Bunker Sample ResultRiskyMaulanaОценок пока нет
- Manual Utilizare Fax PanasonicДокумент20 страницManual Utilizare Fax PanasonicGeorge ChioreanОценок пока нет
- Best Practices and Deployment Veeam and ExaGridДокумент42 страницыBest Practices and Deployment Veeam and ExaGridDuc Nguyen MinhОценок пока нет
- Introduction To StatisticsДокумент9 страницIntroduction To StatisticsJudith CuevaОценок пока нет
- EXPERIMENTAL ANALYSIS OF CENTRIFUGAL BLOWER WITH BACKWARD FORWARD AND RADIAL CURVED VANE Ijariie7400Документ10 страницEXPERIMENTAL ANALYSIS OF CENTRIFUGAL BLOWER WITH BACKWARD FORWARD AND RADIAL CURVED VANE Ijariie7400Mohammed Asif Kattimani MechanicalОценок пока нет
- Syllabus Electrical Machines Subject Code: Ele-405 L T P: 2 1 0 Credits: 03Документ3 страницыSyllabus Electrical Machines Subject Code: Ele-405 L T P: 2 1 0 Credits: 03Nitin PalОценок пока нет
- 3D Catalog HG11 31 enДокумент47 страниц3D Catalog HG11 31 enqwkerbk090909Оценок пока нет
- Accounts Receivable AllowanceДокумент5 страницAccounts Receivable Allowancevalen banoОценок пока нет
- DPR Qa QCДокумент2 страницыDPR Qa QCDarayani AstutiОценок пока нет
- Paramjeet ResumeДокумент2 страницыParamjeet ResumeAditya BhargavaОценок пока нет
- VSX-826 VSX-821: VSX-821 - 826 - SYXCN - QSG - En.book 1 ページ 2011年3月1日 火曜日 午前9時50分Документ156 страницVSX-826 VSX-821: VSX-821 - 826 - SYXCN - QSG - En.book 1 ページ 2011年3月1日 火曜日 午前9時50分johnОценок пока нет