Академический Документы
Профессиональный Документы
Культура Документы
MVI 7ed Parte1
Загружено:
Samuel HernandezОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
MVI 7ed Parte1
Загружено:
Samuel HernandezАвторское право:
Доступные форматы
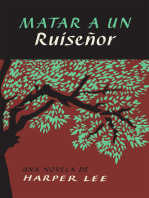
cclones en los soportas y conexlones
para una estructura tridimensional
PueLZII eou Itnea de !lcol6n conoeirla
Bnla
Srrporflclo siu fricci6n
(Ilim itlc6gnita)
CubiC'
Fuerza t'ODlInea de !IJXli6n eonocida (Ullillllclignita)
!r1'T!l'm
ROllilio sobn: ci E.' l'ug,)~U
'" Rueda sobre riel
F_ .Si1jlGr6cie rugosa
/-;:
Pyt
"
'Ires eompcnen res de luerza
R6tllJa (bola 'I cuenca)
n unlon universal
Junta
T!'eN ·CI'J1lpomm ees I
de Fr'm-a!
Tres componantes
de flletm)' tres pures
'1IlTI
par
{III
:.:P.J' F_
pllrtlS:
j __
Vt;I1$t:
&!\l!/I
00-,
(y dos
compouentcs
de luerza 1& pii~a 192)
Bisagra
Y c:ojinrlf'
~'JT1p e axial UJ
q1H! soporran y carga radinl
iy dos pares;
Tr -s conrponeutes
de fuerza
"tiase la p~gina 192)
MECANJCA VECTORIAL PARA INGENIEROS Estatlca
Estatica
FERDINAND P. BEER
Lehigh University
e. RUSSELL
ELLIOT
JOHNSTON, JR.
University of Connecticut
R. EISENBERG
The Pennsylvania State University
GEORGE H. STAAB
The
Ohio State University
Traducci6n
Matla de los Angeles
Izquierdo Castaneda
Traduotora profesional Revl.slon tecnlca Jesus Manuel Dorador Profesor titular Gonzalez Bertha Franco Rojas Coordinadora de Estatlca Departamento de Meoc'mica y Analisls Faeultad de Ingenierla Unlversidad Nacional Aut6noma de Mexico
Facultad de Ingenieria Universidad Nacionat Autonoma de Mexico
Jose Vllardell
Universidad Pofitecruea de Barcelona
- -. : Leonardo !'t.cwball Couzdlcz Gl"'1Xh1Xt.o: JaneT Rl")f'S Iartinez tL-""""nonOo: 'ergill Campos I'!:')af>z s-..-,.,..;,--dr producciuu: 7.eferilltJCarela Carcfu
VECTOBJAL
PABA INGENIEROS
Prohibitla la reproduceion total 0 parcial de esta obrs, por l'Ilalquk'r medlo, sill la uutorizacidrt escrilu del editur.
McGraw-Hili
Interamericana
DERECHOS HES1<:HVADOS © 2.005 respeeto a In septima edicion en espsfiol [lor ~lcGR.'\~':.mwINTERAMElUCANA EDITORES, S.A. DE C.V A. subsuliart] (d' The McGraw-HiEI Cennpunies. Inc. Cedro Num . .512. Col. Atlumpa Deleg:l(!i6n C, 1111111{\UlIlc. t Ufi450 M.pxil'O, D. F. \licwilro d!~la Camara :-./m:ioIJaI ue la Tnrlnstria Editorial Mexicana, Ih:g_ Ntim, 736
I Bl\ 910-10-4t69-X
I B. ~70-1O-1021-3 {,~clici6uanteriur:
Traducido lie La "eplimn edid611 en illgle.:<i dl' lu ohm: VECTOR MECITANICS STATiCS e 2004, by Th~~ McG1l1W-Hill Cumpunil~s.lnc. All rights reserved. ISBX Ott'; -2:304~36
FOn ENGIl'rEEHS.
098764321[)5
Printed in Mexico
Esta Dbra se lerm.no de Impnmlr an tuniO de 2005 eo Edi1rnsa: I~. SA de G V.
Acerca de los auto res
Beer y Russ Johnston forman una de las mancuemas mas exitosas autorfa de libros de tngenierta. Los auto res de esta ohm. con frezia son ouestionados acerca de c6mo fue que, estando uno en Ley e1 otro en la D niversity of Connecticut, empezaron a escribir sus ;juntos y c6mo logrml segulr colaborando en sus revisiones subse:es . .a respuesta a estas preguntas es seneilla, Russ Johnston inici6 SU ra academica en el departamento de Ingenterta civil y mecanica de ~ University. Ali( conoeio a: Ferd Beer, quien habra cornenzado a jar en ese departamento dos afiosantes y estaba a cargo de los cure mecanica. 'erd S8 sinti6 n1uy complacido al descuhrir que el joven que habia xmtratado para irrrpartir CUTSOS de ingenierfa estructural a nivel de ado no s610 stabs dispuesto, sino tambien ansioso, de ayudarlo a antzar los curses de meoanica, Ambos erefan que dichos curses den enseiiarse a partir de unos cuantos principios basicos y gue los ttos conceptos Involucrados sedan rnejor comprendidos y recordalOT los estudiantes si se les presentaban en una forma gr:ifica. [un;cribieron apuDtes para las clases de esh'i:tica y dmamlea, a lo-s cuales rionnente les agregamn problemas que sentian serfan interesantes ios forums ingenieros, y pronto produjeron e1 manuscrito de la priedicion de Mectiruca para ingenicros. ~ puhlicarse In segunda edicion de M ecdnica pam i'l1geniems y la era edieion de Me-eanica cectariol pa.ra ingeniems, Russ Johnston a en el Worcester Polytechnic Institute y -en las ediciones suhsees en 1,\ University of Connecticut. Mientras tanto, Ferd y Russ habfan ido funciones administrativas en sus respectivos departamentos y 58 dedicaban a la investigacion, a la consultorfa y a asesorar estee; de posgrado, Ferd ene] area de pracesos estocasticos y vibras aleatorias y Russ en el area de estabilidad elastica y en disefio Y ;is estrnctural. Sin embargo, su interes pOl' mejorar la ensefianza de basicos de mecanica no habfa disminuido y ambos continuatnpartiendo dichos eursos mientras revisaban sus libros y comenzaescribir e1 rnanuscrito de La plimera edicion de Mecanica de sa oolabomci6n entre los dos auroras ubarca muchos arias Y muohas es exitosas de todos sus lihros, y las contrtbuoiones de Ferd y ala edueaoion en ingenieria los han heche acreedores de numeroistinciones y reconoeimientos. Ellos recibieron etWestern Elect-ric AM:ord pOl' proto de sus respectivas secciones regionales de 1.'1 Ame-
Society for Engirl.eertng Educaium por su excelencia en la instrucde estndiantes de ingenieri'a y, ademas, recibieron la Distingwi8hed Award de la Mechanics Division de esa misma sociedad. A ,.de 2001, el premia New Mechanics Educator de la Mechanics Di-
:fue nombrado
Beer and Johnston
en honor de estos autores,
V III
Acen:II. cia los ~
Elliot Eisenberg, 58 ha unido al para ill septima edicion de Mea/nica eectoria! para ing_enieros; Est6Lica. Eisenberg habaj6 como colaboradoren lasexta edicien y ahora es coautor de la prute Estdtica. Tambien, George Staab desarrollo la ayuda interactive que acompana a la sexta y septima ediciones, yahora se one al equipo de Ia septima edickm como colaborador en los textos de Esttitic{I 1j Duuimica.
Ferdinand P. Beel'" Nacido en Francia y educado en Francia y Suiza, Ferd obtuvo una rnaestrta en la Sorbonne y un doctorado en ciencias en el.area de mecaniea te6rica en la University of Geneva, Emigr6 a los Estados Unidos despues de servir en elejercito frances durante Ia prime-
Un nuevo coautor y oolaborador, equipo de rrabajo de Beer y Johnston
ra parte de Ia Segunda Guerra Mundial e impartio clases por cuatro afios enel Williams College en el progrartta eonjunto de ingeniena y artes Williams~MIT. Despues de su servieio en el Williams College, Ferd ingres6 al profesorado de Lehigh University donde enseno por treinta y siete afios, Ocup6 varias posiciones incluyendo fa de profesor distinguido de la universidad y director del Department of Mechanical Engineering and Mechanics,en 1995 Ferd recibio un grade honoraria de doctor
en ingenieria por Ia Lehigh University.
E. Russell John$l:on. Jr. Nacido ~n Filadelha, Russ pasee un titulo de ingeniero civil de la University of Delaware y un doctorado en ciencias en 81 area de ingenieria estructural del Massachusetts Institute of Technology. Impartio clases en Ia Lehigh University y en el Worcester Polytechnic Institute antes de ingresar a1 profesorado de la University of Connecticut donde ocupo ill posicion de director del Department of Civil Englll~g y enseno par veintiseis aiios. En 1991 Russ recibio el Outstanding Civil Engineer Award de la section de Connecticut de la American Society of Civil Engineers.
Elliot R. Eisenberg. Realize sus estudios en ingenierfaen Cornell University, Elliot ha enfocado sus actividades en el servicio profestonal y La enseiianza, fue reconocido par so trabajo en 1992 cuando la American Society of Mechanical Engineers 10 distingui6 con Ia Ben G. Sparks Medal par sus contribuciones a La jngeniena mecanica y a la education en tecnologfa de In ingenierla meeanica y por sn servicio en La American Society for Engineering Education, Elliot imparti6 clases durante treinta y dos afios, incluyendo veintinneve en Penn State donde ha sido reeonocido COD premios por ensefianza y asesorfa, George H. Staab. Healizo sus estudios en eieneias y en ingenieriaaeronautica en Ia Purdue University. George u'abaj6 en Sikorsky Aircraft durante tres alios y actualmente es profesor asociado en ingenieria mecanica en Ia Ohio State University clande ha impartido elases por veintidos alIOS. Sus acti.vidades estan enfoeadas en la ensefianza y el servicio, y ha recibido dos premios universitarios: El Charles E. MacQuigg Outstanding Teac.hing Award en 1998 y el Boyer Teaching Award en 1999. George funge como el representante en su campus de la American Society for Engineering Education yes eI eonsejero de la facultad para
la seoeion estndiantil de la American Society of Mechanical ypara varios equipos de proy.ecto estudiantiles. Engineering
Contenido
refacio xiv xx xxiii
gradecimientos lsta de sfmbolos
INTRODUCCI6N 1 .1 .2 .3
1.4
1.5
.6
l.Que es la rnecanica? 2 Conceptos y principios fundamentales 2 Sistemas de unidades 5 Conversi6n de un sistema de unidades a otro Metoda para la soluclon de problemas 11 Exactitud numerics 13
10
ESTATICA
DE PART(CULAS
15
2.1 2..2
2.3
Introducci6n
16
2.4 2.5 2.6 2.7
2..8
2.9 2.10 2.11
Fuerzas en un plano 16 Fuerza sobre una particula. Resultante de dos fuerzas 16 Vectores 17 Adici6n 0 suma de vectores 18 Resultante de varias fuerzas concurrenles 20 Dsscomposicion de una fuerza en sus componentes 21 Componentes rectangulares de una tuerza. Vectares unltarlos Adici6n de fuerzas surnando sus componentes x y y 30 Equilibria de una partfcula 35 Primera ley del movimiento de Newton 36 Problemas relacionadas can €IIequilibrio de una partfcula. Dia,gramasde cuerpo IIbre 36 Fuerzas en al espacio45 Componenles rectangulares de una fuerza en el espacio Fuerza de(inida en terminas de su magnilud y dos puntas sabre su linea de acci6n 48 45
27
2.12 2.13
2.14
2.15
Adici6n de fuerzas ooncurrantes en el espaolo Equilibrio de una partfcula en el espacio 57
49
Repaso y resumen del capitulo 2 Problemas de repaso 67 Problemas de computadora 69
64
CUERPOS RIGIDOS: SISTEMAS eQUIVALENTES 73 3.1 3.2
DE FUERZAS
3.3
3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 3.15 3.16 3.17 3.18 3.19 3.20 *3.21
Introducci6n 74 Fuerzas internas y externas 74 Principio de transmisibilidad. Fuerzas equivalentes 75 Produclo vectorial de dos vectores 77 Produetos vectoriales expresados en terrninos de eomponentes rectangulares 79 Momento de una fuerza can respecto a un punta 81 Tearema de Varignon 83 Componentes rectangulares del momento de una fuerza 83 Producto escalar de dos vectores 93 Producto triple mixto de tres vectores 95 Momenta de una fuerza can respecto a un eje dado 97 Momento de un par 107 Pares equivalentas 108 Adicion 0 suma de pares 110 Los pares pueden representarse por media de vectores 110 Descomposlolon de una fuerza dada en una fuerza en 0 y un par 111 Reducci6n de un sistema de fuerzes a una fuerza y un par 122 Sistemas equivalentes de fuerzas 123 Sistemas equipolentes de vectores 124 Otras reducciones de un sistema de fuarzas 124 Reduceion de un sistemas de fuerzas a una lIave de torsion 0 terser 127
Repaso y resumen del capftulo 3 146 Problemas de repaso 151 Problemas de computadora 153
EQUILIBRIO
DE CUERPOS RIGIDOS 157
4.1
4.2
4.3 4.4 4.5 4.6 4.7
lntroduccion 158 Diagrama de cuerpo llbra
159 160
Equilibria en des dimenslones
Reaccianes en los puntos de apaya y conexiones de una estruclura bidimensional 160 Equilibria de un cuerpo rfgldo en dos dlmensiones 161 Aeacciones estancamente indeterminadas. Restricciones parciales 164 Equilibrio de un cuerpo suleto a das fuerzas 183 Equilibria de un cuerpo sujeto a tres fuerzas 184
Equillbrlo en tres dimensiones
191 191
4.8
Equilibria de un cuerpo rfgido en Ires dimensiones
4.9
Reacciones en los puntos de apoyo y conexiones de una sstructura tridimensional 191
Cootenl®
xi
Repaso y resumen del capitulo 4 211 Problemas de repaso 213 Problemas de computadora 215
5
FUERZAS DISTRIBUIDAS: CENTROIDES Y CENTROSDE GRAVEDAD 219 5.1
5.2 Introducci6n 220
5.3
5.4 5.5
5.6 5.7
>5.8
'S.9 5.10
5.11 5.12
Areas y Hneas 220 Centro de gravedad de un cuerpo bidimensional 220 Centroides de areas y lineas 222 Prlrneros momentos de areas y lfneas 223 Placas y alambres compuestos 226 Determlnaci6n de centroides por integraei6n 236 Te.oremasde Pappus-Guldinus 238 Cargas distribuidas en vigas 248 Fuerzas sobre superficies sumergidas 249 Volumenes 259 Centro de gravedad de un euerpo tridimensional. Centroide de un volumen 259 Cuerpos compuestos 262 Determinaci6n de centroides de volurnenes por integraci6n
del capitulo 5 274
262
Repaso y resumen
Problemas de repaso 278 Problemas de computadora
281
6
ANALISIS DE ESTRUCTURAS
284
.1
lntroduoclon
285
Armaduras 286 Definici6n de una armadura 286 Armaduras simples 288 Ana.lisisde armaduras mediante el rnetodo de los nodos 289 Nodos bale condiciones especiales de carga 291 Armaduras en el espacio 0 espaciales 293 Anallsls de armaduras por el rnetodo de secciones 303 Arrnaduras formadas por vartas armaduras simples 304 Armazones y maqulnas 315 Estructuras que contienen elementos sujetos a fuerzas mUltiples 315 Anallsls de un armaz6n 315 Armazones que dejan de ser rigidas cuando se separan de sus soportes 316
Maquinas 331 6 349 343
o
11 2
aso y resumen del capftulo emss de repaso 346 emas de computsdora
FUERZAS EN VIGAS Y CABLES
353
"7.1
*7.2 *7.3 *7.4 *7.• 5 lntroducclon 354 Fuerzas intemas en elementos 354
*7.6
Vigas 361 Diferentes cargas yapoyos 361 Fuerza cortante y momento fiector en una viga 362 Diagramas de fuerza. cortante y de momenta flector 364 Aelaciones entre carga, fusrza cortante y momento flector Cables 383 Cables con cargas concentradas Cables con cargas distribuidas Cable parab6lieo 385 Catenaria 394 7 408 383
372
'7.7
*7.8 *7.9
384
*7.10
Repaso y resumen del capftulo Problemas de repaso 405 Problemas de computadora
402
FRlCCI6N
0 ROZAMIENTO 411
8.1
8.2 8.3 8.4
8.5 8.. 6 *S.7 &8.9 *S.10
*8.8
lntroduccion 412 Leyes de la friecion seca. Coefielentes de friccion 412 Angulos de fricclon 415 Problemas que involueran triccion seca 416 Cuiias 431 Tornillos de rosca euadrada 431 Chumaceras 0 cojinetes 11505. Frtccton 0 rozamiento en ejes CoJinetes de empuje. Frtcclon en discos 442 Friceion en ruedas. Aesistencia a la rodadura 0 rodamiento Friccl6n en bandas 450 8 461
440
443
Repaso y resumen del capftulo Problemas de repaso 464 Problemas de computadora
467
FUERZAS DISTRIBUIDAS: MOMENTOS DE INERCIA 471 9.1
9.2 9.3 9.4 9.5 9.6 9.7 *9.8 *9.9 Introdueci6n
472
473
Momentos de Inereia de areas 473 Segundo momenta 0 momenta de inercia de un area Determinacion del momento de lnsrcia de un area por integracion 474 Momento polar de inereia 475 Radio de giro de un area 476 Teorema de los ajes paralelos 0 teorema de Steiner Momentos de inercla de areas compuestas 484 Producto de inercia 497 Ejes principaJes y momentos principales de inercia
483
498
*9.10
Cfrculo de Mohr para mementos y productos de inercia
506
Contenldo
xiii
Momentos de inercia de masas 9.11 9.12 9.13 9.14 9.15 *9.16
512
172
*9.17 *9.18
Momento de inercia de una masa 512 Teorema de los ejes paralelos 514 Momentos de lnercia de placas delgadas 515 Determinacion del momento de inercia de un cuerpo tridimensional per integraci6n 516 Momentos de inercia de cuerpos compuestos 516 Momento de inercia de un cuerpo con respecto a un eje arb!1rario que pasa a traves del punto 0. Productos de inercia de masa 531 Elipsoide de inereia. Ejes principales de inercia 532 Determinacion de los eies y los momentos principales de inercia de un cuerpo de forma arbitraria 534
Repaso y resumen del capitulo 9 Problemas de repaso 551 Problemas de computadora 554
545
METODa
DEL TRABAJO
10
VIRTUAL
557
*10.1
'"'10.2 ·10.3
*10.4 *10.5 *10.6 *10.7 *10.8
'"10.9 440
443
Introducci6n 558 Trabajo de una fuerza 558 Principio del trabajo virtual 561 Aplicaciones del principle del trabajo virtual 562 Maquinas reales. Efieienola rnecanlca 564 Trabajo de una fuerza durante un desplazamiento flnito Energia potencial 580 Energfa potencial y equilibrio 581 Estabilidad del equilibr.io 582 592
578
Repaso y resumen del capitulo 10 Problemas de repaso 595 Problemas de computadora 597 Creditos de las fotograflas
601
indlce anaUtlco
603 609
Respuestasa problemas
Prefacio
OBJETIVOS
El objetivo principal de un primer curso de mecanica dche ser desarronal' en el estudiante de ingenierfu la capacidad de anxlizar cualquier problema en forma logica y sencilla, y Ia de aplicar panl su solucion
algunos principios basicos perfectamentE" comprendidos. Se espera que
este texto, disefiado para un primer ell rso de estatica impartido en el segundo afio de estudlos, y el siguiente to III 0, MecaniclI V(lctori.£il }Jara ingen'ieros: Dindmica, ayuden al profesor a alcanzar estH objetivo.
ENFOQUE GENERAL
En la parte initial del texto se introduce el analisis vectorial, el cual se utiliza en la presentacion y exposicion de los principio. fundamentales de la rnecanica. Los metndos vectoriales se usan tambien para resolver diversos problemas. especialmente en tres dimensiones, donde estas tecnicas permiren obtener Ia solnci6n en la Iorma mas coneisa y simple. Sin embargo, el enfasis del libro se mantiene en el correcto aprenchza]e de los prineipios de la mecanica y su aplicacion para la 50111c[6n de prohlemas de ingenielia, par
maim ante, como una berramlen ta util:
10 que eJ an ali sis vectorial se p1'e5enta. primer-
Se introducen apllcaciones practicas desde una etapa inicial. Una de las caracterfsticas del enfoque usado en estes tomos es rlllC' la mecanica de paruculas se 11<1eparado en forma clara tle la mec~lJli.<':H de s ct,erpos r£gidcs. Este enfoque bare posihle considerar aplicaciones pnlcticas simples en una etapa inicial y posponer 1a intrcduccion de los conceptos mas avanzados, Por ejemplo.
En Estdtica, III estatica de parnculas se estudia prnnero (oapftulo 2) despues de haber preserrtado las reglas para la adjd6u y sustrncclon de vectores, y el principia de equillhrio de una partfcula se apllca inuiediatameute a situaciones praeticas que involucrau s610 a Iue-rzas coucurrentes, La estatica de los CUE'rpos l'fgiLlos 58 consilient en los capftulos 3 y 4. En el capftulo 3, se tnrroducen eJ producto escalar y vectorial de dos vectores y sc urtlizan pam delinlr el memento lIP
~EIIun lihro relacionado, Mcl'lfl~i"a 1)t!/Yl j'I{!"lli<'/'O.9: Esttittra, euarta celi"jon, d nsc del :i4.'<"bra vectorial esta limitatln II 111 adlcion y susrruccieu de vectorcs. -
una rumza alrededor de lUJ punto y alrededor de un eje, La presentacion de estos rmevos concel)tos es seguida por la exposici6n rigurosa y completa de los sistemas de fuerzas equivalentes que conducen, en el capitulo 4, a rnuehas aplicacirmes pn'icticas que involucran el equilibrio de cne1l?Os rfgidos bajo la action de sistemas
Prefacio
XV
generales de fuerzas.
En Dinarnica, se observa la misma divisi6n. Se introducen los conceptos basicos de fuerza, !lUISa, y aceleracion, de trabajo y energfa, y de impulse y momentum, y se aplican en primera instancia a Ia solucion de problemas que involucran s610a particulas. De esta for-
ma, los estudiantes S8 pueden familiarizar par S1 rnismos con los tres metodos basicos utilizados en diuamica, y aprender sus respectrvas ventajas antes de enfrentar las dificultades asociadas con el rnovimienlo de cuerpos ligidos.
Los conceptos nuevos se presentan en term1nos simples.
Como este texto esta dlsefiado para uu primer curso sobre estatica, los conceptos nuevas se presentan en terrninos simples y eada paso se expllea en fonna detallada, Par otro lado, este enfoque aleanza una rnadurez deflnitiva al analizar los aspectos mas relevantes de los problemas CODsiderados y al extender los metodos de apllcabiltdad general Par ejempia, los conceptos de restricciones parciales y de indeterminacion estatica e inrroducen al principio del texto para ser usados en todo el libra.
Los principios fundamentales se ubican en el contexto de apll· caclones simples. Se enfatiza el heche de que la mecanica es esencialmente una oieneia aJ~ductiv(J, basada eo algunos principios fundamentales. Las derivaciones se presentan siguiendo sn secuencia 16gica y con todo so de aprendizaje
el rigor requerido a este nivel. Sin embarge, en virtud de que el procees primordiahnente ·jnductivr,J, S8 consideran primero las aplicaciones mas simples. Por ejernplo: • • La estatica de partfculas ante cede a la estatica de cuerpos rigidos, y los problemas que involucran Iuerzas intemas se posponen basta el capitulo 6. En el capftulo 4, se oonsideran primero los problemas de equilibrio que involucran s610 a fuerzas coplanares y 58 resuelven por media del algebra ordinarta, mientras que los problemas qLle involucran fuerzas tridimensionales, los cuales requieren, e1 usa oompleto del algebra vectorial, se exponen en la segunda parte de dicho capitulo.
Se emplean diagramas de cuerpo libre para resolver proble-
mas de equilibria y para expresar la equivalencia de sistemas de erzas. Los diagramas de c:uerpo lihre se introducen al principia, y enlatiza so importanCia a 10 largo de todo 131 texto. No solo se emplean a resolver problemas de equilibrio sino tarn bien para expresar la
eqrnvalencia de dQS sistemas de fnerzas, 0 en forma mas general, de dos mtemas de vectores. La ventaja de este enfoque S8 hace evidente en el milia de la dlnamiea de CUClpOS rigid os, dan de se utiliza para resolver mblemas bidimensionales y tridnnensionales . Como S8 mostrars en el IDO de dinamica, se puede obtener una comprensi6n mas intuitiva y pleta de los principios fundament-ales de la dinamica al poner mar eruasis en las "ecuaciones d los diagramas de cuerpo libre" en Ingar
en las ecuaciones algebraicas estandar de movimiento. Este eufuque, +resentado en 1962 en la primera edicion de Mecanica vectorial para
<'"enieros,
res de mecanica. Por
ha obtenido ala fecha una amplia aceptaci6n entre los pro10 tanto, pan!. la solucirin de todos los preble-
xvi
Prefacio
mas resueltos en elite Iibro, se prefiere su utilizacion en lugar de la del metoda de equilibrio dinamico y la de las ecnaciones de movimiento. Se mantiene, en forma consistente, un cuidadoso balance entre las unidades del 51 y las unidades de uso comun en Estados Unidos. Debido ala tendencia que existe enla actualidad en el gobierno y la industria estadounidenses de adopter el sistema intern aclonal de unidades (unidades metricas S1), lasunidades 51 que se usan con mayor Irecuencia en rnecanica se Introducen en el capitulo 1 y se emplesn en todo el libro. Aproximadamente la mitad de los problemas resueltos y 60 par ciento de los problemas de tarea estan p1anteados en este sistema de unidades, mientras que el resto se proporoionan en las unidades de uso comtin en Estados Unidos. Los autores creen que este cnfoque es el que se adecnara mejor a las necesidades de los estudiantes, quienes, como ioge-nieros, tendran que dominar los dos sistemas de unidades. 'Iambien se debe reconocer que el 1J50 de ambos sistemas de unidades significa mas que el uso de factores de conversion. Como el sistema de unidades SI es un sistema absolute basado en el tiernpo, Ia longitud y Ia masa, mientras que el sistema de nnidades de usa cormin en Estados Unidos es lID sistema gravitacional basado en el tiernpo, la longitud y la fuerza, se requieren diferentes enfoques pata la solueion de muehos problemas. POI' ejemplo, cuando se usan las uni.dades S], por 10 general un cuerpo 5e especifica pnr su masa expresada en kilogramos; en Ia mayorfa de los problemas de estatica sera necesario determinar el peso del cUt;npo en newtons, para 10 cual se requiere un calculo adidonal. POT otro lado, cnando se usan las unidades de uso connin en Estados Unidos, UD cuelpo se especifica a haves de su peso en libras y, en problemas de dinamica se requerira un calculo adicional para determinar su rnasa en slugs (0 Ib.s2/ft). Par 1Q tanto, los autores creen que los problemas que se les asignen a los estudiantes deben incluir ambos sistemas de unidades, En las secciones opcionaJes se ofrecen toplcos avanzados 0 especializados. En el Iihro se incluye 011 gran munero de secciones opcionales. Estas secciones se sefialan par medio de asteriscos y, par 10 tanto, S8 disnnguen faciJmente de aquellas que forman la parte fundamental de un curso basico de estatica, Dichas secciones pueden ornitirse
sin perjudicar Ia comprension del resto del texto,
Entre los t6picos cnbiertos en las secciones adicionales se encuentra Ia reduecion de un sistema de fuerzas a una llave de torsion, aplicaclones a hidrostatica, diagramas de fuerza cortante y momenta Hector. equilibria de cables, preductos de inereia y circulo de Mohr, la determinaeion de los ejes principales y mementos de mercia de un cuerpo de fonna arbitraria, y el metoda del traba]o virtual Las secciones sobre vjgltS son especialmente 6tiles cuando 181 curse de estatica es seguido inmediatamente por un curse de mecaniea de materiales, rnientras qlle las seceiones sohre las propiedades de inercia de euerpcstridimensicnales foeron pensadas primcrdialmente para los estudiantes que posteriormente es-
tudiaran en dinamica el movnniento tridimensional de cnerpos rlgidos. El material presentado en eJ Tibro y la mayor parte de los preblemas no requieren conocimiento maternatico previa superior al algebra, la tligonolDetria y el calculo elemental; todus los eonocimientos del algebra elemental neeesarios para la compreaslrm del texta se presentan con detalle en los capftulos 2 y 3. En general, se pone mayor eruasis en la
comprension adecuada de los conceptos maternaticos basieos incluidos que en Ia manipulacion de las formulas rnatematicas. AI respecto, se debe
mencionar que la determinacion de los centroides precede aJ calculo de centroides por integraci6n, establecer firmemente e1 concepto del momenta introducir e1 usa de las integrales, CARACTERfsTICAS
de areas compuestas 10 que haee posible de un area antes de
Prefaclo
xvii
NUEVAS EN ESTA EDICION qt:te han sido tan
En este texto se conservan el enfoque )' la orgamzacion bien recihidos en ediciones anteriores, Ademas, en la ofrecen las siguientes caracterfsticas y tnejorfas: •
septima edici6n se
1
•
!1
Noventa par ciento de los problemas de tarea en la septirna edici6n son nuevas 0 han sido revisados, El eniasis puesto en problemas relacion ados con 1a Industria y preguntas de disciplinas especfficas de esta nueva edicion proporciona una motivacion para los estudiantes actuales, Los problemas de compntadora se han revisado para ser resueltos can software, y Ia cantidad de problemas se ha incrementado. Los problemas. de computadora, muchos de los cuales son r levantes para el proceso de diseno, se han incluido en una seccion especial al final de cada capitulo. AI contrario de ediciones previas de este texto, dlchos problemas estan enfocados en la manipulacion simb6lica y la graflcaci6n., que en la programacten de oomputadoras. Se- han incluido numerosas lotogmfias at interior de los capttulos para ayudar a los estudiantes a visualizer mejor algunos conceptos importarrtes. En las secciones de introducci6n, se han agregado bosquejos de] capftulo para proporcionar una visi6n previa de los t6picos que seran cuhiertos en el rnismo.
mas
;-
ORGANlZACI6N EDAG6GICAS
DE LOS CAPiTULOS V CARACTERISTlCAS
o ~
lo
ase
0;3.)(,
Introducci6n del capitulo. Cada capitulo comienza can Lina seen de introduccion que establece el propositn y los objetivos del misme y eo la que se describe en terminus sencillos 81 material que sera "::"Ibierto y sus aplicaciones en la solucion de problemas de ingenieua. ....os nuevos bosquejos del capitulo proporcionan a los estudiantes una 3IDO previa de los t6picos del mismo,
mridades, eada una de las cuales consiste se una
lide viin-
~as
le-
del texto esta dividido en 0 secciones de teouno 0 varies problemas resueltos, y una gran cantidad de problemas tarea, Cada unidad corresponde a un terna bien definido que gene.;.llIlente puede ser cubierto en una lecci6n. Sin emba.rgo, en ciertos cael profesor encontrara que es deseable dedicar de una leccion .!II t6pico en particular.
Lecciones en el capitulo.
EJ cuerpo
mas
mas
es-Jetra,
Problemas resueltos. Los problemas resueltos se plantean de era muy similar a Ia que usaran los estudiantes euando resuelvan los [emas que se les asignen. Par 10 tanto, estes problemas cumplen el proposito de ampliar el texta y de demostrar la forma de trabajd = y orden ada que los estudiantes deben cultivar en sus propias solu-
ge:!On
ciI:Joes.
• Resoluci6n de problemas en forma independlente. Entre los mas resueltos y los problemas de tarea, se rncluye en cada leccion secci6n titulada Reso!ttci6n de problemas en forma inclttperidiente.
11a
dos ebe
xvii i
Prefacio
El proposite de estas seocienes es ayudar a los estudiantes a organizar mentalmente la Moria ya cnbierta en el texto y los metodos de soluci6n de los problemas resueltos, de manera que puedan resolver con mayor exito los problemas de tarea, Ademas, en estas secciones tambien se incluyen sugerencias y estrategias especifieas que les permitiran enfrentar de manera mas eficiente cualquier problema que se les asigne,
Grupos de problemas de tarea. La mayorfa de. los problemas son de naturaleza practica y deben llamar la atenci6n del estudiante de ingenieria. Sin embargo, estan disenados para ilustrar el material presentado en el texto y para ayudar a los estudiantes a comprender los prmcipios de la mecanica. Los problemas se han agrupado de acuerdo co las partes del material que ilustran y se presentan en un orden creeiente de dificultad, Los problemas que requieren atenci6n especial sesefialan par medio de asterisoos, AI final del texto se proporcionan las respue tas correspondientes a un 70 por ciento de los problemas propuestos, Y aquellos para los cuales no se cia respuesta se indican en el lihro escrlbiendo su mimero en cnrsivas. Repaso y resumen del cepftulo. Gada capitulo finaliza can ill repas.o y un resumen de1 material cubierto en el mismo. Las notus margen se utilizan para ayudar al estndiante a organizar su trabajo de revision, adem as se han incluido referencias cruzadas para ayudarlos encontrar las partes de material que requieren una atencion especi Problemas de repaso. AI final de cada capitulo se incluye ur grupo de problemas de repaso. Estos problemas proporcionan a los estumantes una oportunidad adicional de apbear los conceptos mas importantes presentados en ei capitulo. Problemas de computadora. Gada capitulo incluye un grupo problemas disefiados para ser resueltos can software. Muchos de e problemas SOD importantes para eJ proceso de disei'io. En estatica, P' ejemplo, pneden tnvolucrar el analisis de una estruetura para diferente configuraciones y cargas de Ia estructura 0 1a determinacion de las p~ ciones de equilibrio de un mecanisme que puede requerir un metoc Interactive de soluci6n. E1 desarrollo del algoritmo requerido pc. resolverun problerna de meoanica dado benefictara a los estudiantes _ dos formas diferentes: (1) les ayudara a obtener una mejor comprenss de los prineipios de la rnecanica involuerados, (2) les proporeionara oportunidad de aplicar sus habilidades con la computadora para Ia so.. cion de un, problema relevante de ingenieria.
SUPLeMENTOS~ Can 131 tesro esta disponible un paquete de suplementos tanto para F fesores como para estudiantes. El materiaJ para el profesor incluye manual can las soluciones completas a todos los problemas del t gmpos de inuigenes con los archrvos electronicos de todas las lIga imagenes incluidas en elIibro, presentaeiones en J?owerPoint de t los capftulos; transparencias de problemas resueltos adieionales, cripciones en diferentes fonnatos de software para todos los problee, de computadora incluidos en ellibro; acceso a sistemas de ge6tion curso para organizer las necesidades particulares de los cursos en lfne., otros recnrsos de presentacion y organizaci6n del curse,
'Para tenor aeeeso a los suplementns de la DUro"tc)ntacl:e al representante local de MeG
nizar
Los estudiantes
tienen aceeso a S.M.A.R.T. (por sus siglas en ingles,
PrefaClD
xix
llcion
tayor iC in-
entar emas te de
l pTe~ _prin-
o con !iente
Ritmo propio, Mecanica, Algoritmico, .Hepaso y Ayuda), 'una aynda interactiva en linea con examenes algontmicos que tamhien puede ser usada como una herramienta de presentacion en clase, El material para el estudiante ineluye, ademas, un examen tipo FE can preguntas de eleccion multiple can retroalimentacion, una guia para e1 usa de software en curses de mecanica, y muchos otros contenidos yberramientas de aprendizaje basadas en Internet. Para mayor informecton de los suplementos disponibles can este hhro, visite el centro de aprendizaje eo line-a (OLC) de Mecanica vectorial para ingenteros: Estdtica y Disuimica en www.mbhe.comJbeerjohnston7.
AGRADECIMIENTOS
malan
:pues;tos.
escri00
un
nas al ajo de mas a pedal.
.yeun
estulmpor-
I1po de
e estos
ca. por srentes
is
posi-
netodo 10 para ntes en
rensieu maci la
Los autores desean agradecer la colaboraci6n de George Staab en esta septima edici6:n de Mecan-ica oectorial para ingenieros, yespecialmente (?or el papel crucial que juga en hacer posible la revision de los problemas. Un agradecimjento especial a los colegas que han venflcado cuidadosamente las soluciones y respuestas para todos los problemas de esta edici6n y que han preparado las solnciones del manual para e1 profesol' adicional al texto: Richard H. Lance de Cornell University; Daniel W. Yannitell de Lousiana State University; Kenneth Oster de la University of Missouri, Rolla; y Petru Petrina de Cornell University Los autores agradecen a las diferentes compafiias que proporcionaron Fotograflas para esta edici6n. Tambien desean reconocer el esfuerzo determinado y la paciencia de Sabina Dowell quien selecciono las fotografias. Un agradecimiento tambien a los miembros de McGraw-Hill pOl' su apoyo y dedicaci6n durante la preparacion de esta nueva edicion. En particular se agradecen las contnbuciones de la editora responsahle Debra Matteson y el gerente de proyecto Jane Mohr. Ftoalmente, los antares desean ell.rpresar SIl gratitud pOI los numerosos comentarios Y sllgerencias que han 000 proporctonados pOI los usuaries de las edtciones anteriores de Mecanica veCi:(lrial para inge-
nwros.
Ferdinand P Beer E. Russell Johnston, Jr. Elliot R. Eisenberg
Ia solu-
ara proIDve un ~ 'texto;
igura5 e Ie todos s: transoblemas ilion del
.llnea&
Agradecimientos
El equipo editorial y de mercadotecnia de McGraw-Hill desea unirse it los agradeciroientos a las personas menoionadas en I prefacio de los antares par sus contribuciones a la septima ediclon de este texto, asi como a la del manual de soluciones. Ademas, tambien se desea ug-radecer a los siguientes revisores, asistentes a grupos de trahajo y asistentes a simposios cuyos comentarios y sugerencias en los tiltimos anus no s610 han ayudado a desarrollar los recursos multimedia y suplemen tarios para la septima edici6n de Mecdnica eectorial pa'm ingeniems, SU10 que tambien han ayudado a establecer estandares y metas para desarrollar otros textos, suplementcs, y nuevas ttknicas multimedia para los curses de estatiea y dinamica,
REVISOFIES DE ESTADOS UNIDOS
Shaaban Abdallah
University of Cincinnati
Yohannes Ketema
University of Minnesota
Charles A. Barnes
University of Massachusetts,
Sang-Soo Kim
Ohio Vniversi't'lj
Lowell
Liang-Wu Cai
Kansas State University
Roger L. Ludin
California State University, San Luis Obispo
Brian Coller
University of Illinois, Chicago
Mohammad Mahinfalah North Dakota State Univel~~it!J James R Matthews University of New Mexico Wilfrid Nixon
University of hnoa
Stephen C. Cowin
City College of New
AJj
York
EI-Zeiny
State University,
California Fresno
Christopher
Marquette
M. Foley
University
Karim Nohra
University of South Florida
John H. Forrester
University of Tennessee
David B. Oglesby University of Miiisow'i, Roll(/
G.E. Ramey Auburn University
Orlando Hankins
xx
North Carolina
State Un'iversity
~IIliam F. Reiter, Jr. Oregon State University Ali A. Selim South Dakota State University William Seta San JOSi' State University
Tenng E. Tan
Francis M. Thomas University of Kansas
Agmdeoimientos
xxi
T. Calvin Tszeng
Illinois Institute
of Technology Christine Valle University of Maine
University of Memphis
$ORES nirse a de los
dO,asl
INTERNACIONALES
Fook Fah L"rJYong Technical Univers'ity
U. Khullef
Ted Stathopoulos Concordia University Wen-FangWu NatiofUll Taiwan University, Taiwan Choo Chu Yang National Tauoan University, Taiwan
tgrnue-
stcntes 00 solo
os-para
If tr
King Fahd University ofPetmleum Minerals, Sau.dt Arabia ktar Ngab nif:emti Teknologi Malaysia, Molays.ia
tamotros
GOS
de
TENCIAS A GRUPOS DE TRABAJO EST A. TICA Y DINAMICA r
, la M, Abdullah rido A&M University
- ~ity
Gil Emmert University of Wisconsin
Alakkarl of Dayton
Brian Fabian Univers,ity of Washington
Roy James Hartfield, Auhuni University
Anderson laer Polyteohntc lnstitl.tte George Buzyna 'dn State University and Florida A&M University
cindar Chona
Jr.
Lib-Min Hsia California State University, Los Angeles S. Craham Kelly The University of Akron Sam Kiger University of
m;ity
A&M University
Conway - I<>f¥ity of
Central Florida
- Coonrod TlirersihJ of New Mexico
- Cornwell
Mi~i~'OUri,
Columbia Jeff Kuo
California State University. Fullertor: Marc Mignolet State University
-Hulman Institute
Arizona orne O. Dunn
Carolina A&T State
Uniutm;ity
Masami Nakagawa Colorado School of Mines
Steven O'Hare
Oklahoma State University
Francis Thomas
University of Kansas
Charles K. Robv
Clemson University
Erik Thompson
Colorado State Unive1-sity
Scott Schiff
Clemson Uni1)ersity
Josef S. Torok
Calijo1'l1ia Bochester Institute of Technology
Geoff Schiflett
University of Southern
Canesh Thiagarajan
Louisiana. State University
Robert Weber Ma1"quette University
ASISTENCJAS A SIMPOSIOS
EN ESTA TlCA Y DINAMICA
Subhash Anand
Clemson University
Stephen Bechtel The Ohio State Universifij Sherrill Biggers
Dan Mendelsohn
The Ohio State Universtty
Mark Orwat
United States MiUta:ry A.cademy
Art Peterson
Un'ivers'ity
Clemse« Univer8ity
Pasquale Cinnella
Mississippi State University
of Alberta
of Colorado at
Tad Pfeffer
University
AdeL El-Safty University of Central Florida
Walt Hais]er Texas A&M University Kimberly M. Hill
University
Boulder
Sadanandan Pradeep
Clarkson University
Robert Rankin
Arizona State. University
of Illinois,
Urbana-Champaign James Jones Purdue Univers-ity Yohannes Ketema
University
Iichael Shelton
California State Polytechnic Vnive'rsity
Larry Silverberg
of Minnesota
North Ca'rolina State Uni'versity
Bob Witt Universi,ty of Wisconsin,
Madison
Chuck Krousgrill Purdue University Mohammad
Mahrnfalah
North Dakota State Un:ive1-s'ity
Wan-Lee Yin Georgia Institute of Technology Musharraf Zaman
Unioel"sity of Oklahoma
Christine Masters
Pennsylvania State University
Lista de simbolos
A,B, C, A.B, C, a . .
A
Constants, radio; distancia
Reacciones Puntos Area en apoyos
y uniones
b
c lemy
C
d
e
F g G i,j, k I, Ix, .. ...:. I
I.'!I' ...
"=
ic
k i; kq
k
l
L m. M Mo
Mg
M
Mol.
o
P
Aneho, distancia Constance Centroide Distancia Base de los Iogaritmos naturales Fuerza, fuerza de friccion Aceleracion de la gravedad Centro de gravedad; constants de gravitaci6n Altura; flecha de un cable Vectores unitarios a lo largo de los ejes coordenados Momenta de mercia Momenta de .inercia centroidal Productos de inercia Momenta polar de inercia Constante de un resorte Radios de giro Radio de giro centraidal Longi..tud Langitnd; claro Masa Par; momenta Memento can respecta al punto 0 Momenta resultante con respecto al plmto 0 Magnitnd de un par a de un memento, masa de La Tierra Momenta con respecto al eje OL Componente normal de una reaceion Origen de coordenadas
Presion
wlogy
Q
r
Fuerza, vector Fuerza; vector Vector de posicion
xxiii
Radio; distancla, Radio de la Tierra
coordenada
polar
R R s
Fuerza resultante, vector resultante, reacci6n Vector de posicion
Longitud de area; longitud Fuerza, vector Espesor Fuerza de un cable
s
S
t T T U V V
tv
Tension vectorial; Iuerza cortante Volumen; energfa potencial; cortante
Carga por umdad de longitud Peso; cID-ga Coordenadas rectangulares, distanoias Coordenadas rectangulares del oentroide o centro de gravedl1d Angulos Peso especffico Elongaci6n Trabajo Producto
W,W
X, y) x,Y,z
01. Z
[j,y y 8 8r
8U
Desp Iazamiento virtual
Trabajo virtual Vector unitario a 10 largo de una Ifnea Eficiencia Coordenada angular; angulo; coordenada
A
'11
()
polar
P. P
Coeficiente de fricci6n
Densidad
<P
Angulo de fricci6n; lingulo
MECANICA VECTORIAL PARA INGENIEROS Estatica
les del siglo 'XVII, sir tsaae Newton establecl6 los principlos funtlamentales de la mecjnlca; los cuales moyen la base de gran par:te d~ 11llnOMierfa od~t'i')~.Su p,inclplal p.ubUcado en 1687, resuml6 sus tra"ajos meeanica terrestre, celestlal y de flUId os.
1.1. G,QUE ES LA MECANICA? INTRODUCCI6N 1.1 1.2 1.3 1.4 1.5 1.6 l.Oue as Ia rnectinica? Conceptos y principlos fundamentales Sistemas de unidades Conversj6.nde un sistema de unidad,e.s a otto Metoda para 11:1orl,lci6nde s problemas Exactitud numerica La mecanica se puede definir como la ciencia que describe y predice las condiciones de reposo 0 movimiento de los cuerpos bajo 1.1. accion de fuerzas. Se divide en tres partes: la meeanica de cuerpos rigid/Js. 1::< em caniea de cuerpos defomtables y la mecdnica de fluidos. La mecsniea de cuerpos rfgidos se suhdivitle 611 esuitica y dinrimica.; la primera estudta los cuerpos en reposo y [a sl:'guucla los cuerpos en movimiento. En esta parte del estudio de la uieeanica se snpOlle qne los cuerpos son perfectamente rigidos. Sin ern hargo, las estructuras )' las maquinas reales nunca 10 son y se deforman bajo las cargas a las que estan sometidas. Estas deform. clones casi siempre son pequefius y no afect::m. de manera apraciabla las condiciones de equilibria 0 de rnovirniento de la estruetura en consideracion. Pero son irnportantes cuando se tiene en cnenta la resistencia de la estructura a las fal1ll.'i y se e.studiau en ill mecaniea de materiales, que es una parte de ill meoinica de cuerpos deformables. La tercera parte de la rnecanica, la de Iluirlos, se subdivide en e1 estudio de los fluidos i:ncO'Inpre.sibles y 81 de los jlllidos cnlllpre.il'i~ bles. La hidrd1,tlica es una subdivisi6u importante en eol estudio de los fluidos incompresibles y trata problemas relarivos a los Ilquklos, La mecanica es una ciencia Hsica puesto ljue estuclla Ienotuenos B'sieos. Sin embargo. algunos Ia asocian con las rnatematicas, mientras que otros Ia eonsideran un tema de ingenicrfa. Ambos puntos de vista se justi£i.can parcialmente. La meeanica es la base de la mayorfa de las ciencias de la ingenieria yes un requisite indispensable pitra cstudiarlas. Sin embargo, no tiene el caraeter empilico propio de a1gtmas cieneias de la ingenieIia, es deeir, no se basa s610 en If! experiencla 11 observacidn, pDr su rigor y Ia importancia que da alrazouamtento deductivo se parecc a las matemattcas. Pero tampoco as una ciencia abstracts Hi siqniera una ciencia pura; es una ciencia aplicada. Su proposito es explicar y predecir los fen6menos fisicos y panel' las bases para aplicarlas en ingenierfa.
1.2. CONCEPTOS Y PRINCIPIOS
FUNDAMENTALES
Aunque el estudio de la mecanica se remonta a los tiempos de Aristoteles (3B4-32~ a.C.) y de Arqujmedes (287-212 a.C.), se tuvo qlle espenu' hasta Newton (1642-1727) para encontrar una formulacion satlslactoria de sus principios fundamenrales.dos cuales fueron expresatlos despues en forma modificada par d'Alembert, Lagrange) Hamilton. S11 validoz pennanecio inc61nme hasta que Einstein Iormuio su teori« (fr, ln relaHuidad (1905). Si bien ahara se han reconocido las limftacicnes de fa mecdnlca TletL-'tomana, esta aun es la base de las aetuales ciencias de la ingenieria. Los conceptos basioos que se mplean en la meoanica soil espacia, tiempo. masa y fuerza. Esros conceptos no pueden ser dellnidos en forma exacta; deben aceptarse sobre las bases de uuestra intuition y experiencia y emplearse como un marco de referenda mental en el estuclin de Ia meoanica, El concepto de eSptL(,'10 se asocia con Ia nocion de posicion de uu punto P. La posici6n de este puede defiuirse pOl' tres longitudes rnedidas desde cierto punta de refereneia u origen, en tres direcciones dadas, Estas longitudes se conoeen como coordeuadas de P. Para definir un evento, no as sullciente cou ilHlic,u' sn [}(Isldon en el espacio sino qu debe darse tarnblen ('I Uempll del eveuto, EI concepto de masa tien~ la Iuncion de caracterizar y comparar los cuerpos con base en ciertos experimentos mecanicos Iuudarueulules. Pur ejemplo, dos cuetpos que tengan Ia mlsma masa seran atraldos par JIl
Tierra de igllal forma; tambien presentaran ice las lon de lameiJlami-
la misma resistsncia a un
1.2. Canceptos
y princlpios
fundamerrtales
cambia ell su movimiento traslacional, Una [uerza representa la acci6n de un cUeJpo sobre otro y puede ejerrersc pOl' coutacto real 0 a distancta, como en el caso de las fuerzas ~itacionales y rnagnetioas. Una hierza se earaoteriza par 5U punto de icacion, magnitud y direccum y se representa con un vector (seeeion
:?.3
pns en
los s y las as qne LS y no
pIC
. movi-
~uando smdian
:'Ucrpos
En Ia mecanica uewtoniana, espaoio, tiempo y masa son conoeptos absolutos e iadependlentes entre sf (esto no esasf en la meodrdca rela. a, donde el tiempo de un evento depende de su posicion y la rnasa de un cuerpo varia con su velocidad), Por otra parte, el concepto de fuer.za no es independiente de los otros tres, En realidad, uno de los pnncipios Iundamentales de la mednica newtoniana, que se enunoian &hyc, indica que la Iuerza resultants que achia sobre un cuetpo se .re~ .ana can la masa de este y c-on11'1. fonna en que VIDia su velocidad en
tiernpo.
bdivide
r1lpresiI
de los
enos
1 se
11-
eras qllE:'
jusas cien-
b cuerpos rfgidos. Adernds, los resultados obtenidos para una partfcucondiciones
Se estudiaran las condiciones de reposD o movimiento de partfcnlas cuerpos rigido~ a partir de los cuatro prinGipios basioos que se han exo, Por parliGula se entiende una pequefifsima cantidad de materia ocupa un punta enel espacio. Un Cl.tBrpO rfgido es la combinacioa un grd.ll rnimcro de partfoulas que ocnpan posieiones fijas entre 51. El estudio de la mecaniea de las partfculas es un requisito previo al de
rlas. Sin las de la 'i(lll; por
oareee a iera una
puwen nsarse directamenteen muchos problemas que batao de las de r"'posa f) movimiento de cuerpos reales, El estndi o de la n recanica elemental descansa sobre seis principios ~ameTltales basados en la evidencia experimental.
.La
\- prede~e[lieria.
ley del paralelogramopara, la adici'on de fuerzas. Estahlece dos fuerz<L~tille <l('tlhmsabre una particula pueden ser sustituidas
una sola rm"'n,:allamada resultante, que se obtiene al trazar la diagodel paralelogrumo QllC tiene los lades iguales a las fuerzas dadas (sec2_2). :EI principio de transmls~ibmdad. Establece que las condiciones nilibrio 0 de rnovimiento de un cuerpo rigido permaneceran inalsi una fuerza que actua en un punta del cuerpo ngido se sustie POI' una Iuerza de la misma magnitud y la misma direceion, pero N'tue en nn punta diferente, siempre que las dos fuerzas tengan Ja linea de accion (seccion 3.3).
Las tres leyes fundamentale.s de NewtonFueron Iormuladas Sir rsaac Newton a finales del siglo xVII y pueden enunciarse como
Arist6te-
~esperar
isfactnria
-.;.0.-..."-,,
u valklez
dill iuidad IUcanew-
despues
ia
I
1"0
espada, forma de
un
expclienshIWO i6n ae.')
PRIMERA LEY. Si 1a fuerza resultante que actUa sobre una pares cero, Laparucula permaneeera en reposo (si originahnente esen reposo) 0 5e movera con velcotdad constante en linea recta (si mente estaha en movimiento) (seccton 2.10).
SEGUNOA LEY. Si la fuerza resultante que actiia sabre una parQ es cera, la partfcula tendra una aceleracton proportional at la d de la rcsultante y en la direeeion de esta,
10
de
des medi-
dadas,
~ici6Tl PH
nparar los
ltak~s. Pm
se verti en Ia seccion 12.2, esta ley pnede expresarse asl (1.1)
dos
pOl'
l,t
Introduccj6n
dande F, my a representan, respeetivamente, 1a fnerza resultante que acnia sabre la particula, la masa de esta y la aceleraci6n de Ia misma, expresadas en un sistema congruente de unidades. TERCERA LEY. Las fuerzas de acci6n y reacoion de cuerpos en contacto tienen la misma magnitud, la misma lfnea de aocion y sentidos opuestos (seceion 6.1). La ley de gravitaci6n de Newton. Establece que dos partfculas de masa M y m se atraen mutuamente con fuerzas iguales y opuestas F y - F (figura 1.1), de magnitud F dada par la formula (1.2) donde r La
Figura 1.1
Ia distancia entre las dos partfcnlas la idea de una accion ejerci-
G' = Ia con stante unrversal llamada constante de gravitaci6n
da a distancia y extiende eI alcance de aphcaeion de la tercera ley: la accion F y Ia reacci6n - F en la Figura 1.1 son iguales y opuestas y tienen
ley de gravitaci6n de Newton introduce
la misma linea de acci6n.
Un easo de gran importancia as e1 de la atraccion que la Tierra ejerce sohre una particula situ ada en su superficie, La fuerza F ejercida pOT la Tierra sobre Ia particula se define como el peso W de In partfcula, Tomando M igual a la masa de la Tierra, m igual a la rnasa de la partfcula, y r igual al radio R de Ia Tierra e introdnciendo la constante
u=-b
GM
R2
de masa m. puede
(1.3) exp:r:esarse
la maFtud W del peso de una. particula como
W=m
(1.4)
Fotogratia 1.1 Cuando sstan en la orbita tsrresIre, se dice que las personas y los objetos no tlenan peso, sun cuando la tuerza gravltacional que aetna Sabre elias as aproximadamente 90% de la que sa experimenta en la superficie de la Tierra. Esta aparente contradiccion se resolvera en el capitulo 12, cuando se apllca la seg:unda ley de Newton al movimiento de partleulas.
Elvalor de R en Ia formula (1.3) depende de 1a elevacidn del punta eonsiderado, tarnbien depende de sn latitud, puesto que la Tierra no es realmente esferica. Asi que el valor de gvaria con la posici6n del punto cuesti6n. Mientras el punta permanezca sobre la superflcie de la Tierra. en la mayoria de los ealculos de mgenieria es suficientemente preciso supaner que g es igual a 9.81 m/s2 0 32.2 ftls2. Las prtaeipios que S8 acahan de enuneiar se iran explicando en ei. curso del estudio de la mecamca conforms sea necesano, El estudio de la estatiea de parnculas se realiza en el capitulo 2 y se basa solo en Ia I _' del paralelogramo para la amm6n yen la primera ley de Newton. El principio de transmisilnlidad se expondra en e1 capitulo 3, at comenzar el tndio de la estatica de ouerpos rigidos, y la tercera ley de Newton expone en e1 capftulo 6, cuando se analicen las rmerzasejercidas entre" los diferenteselementos que forman una estruotura, En el estudio de dinamica se intrcdnciran 1a segunda ley de Newton y la ley de gravita cion. Alli se mostrara que la primera ley de Newton es .un casu particeIar de Ia segunda ley (seccion 12.2), y que eI prineipio de transmisihilide
',Una definicion mAspreclsa del peso W deb .. iomar en ouenra la rotacion de Ill. Tierra, "
mte que iSIDa, ex-
erpos en sentidos
>articu1as )Uestas E
(1.2)
!Cion i6n ejerciley: la acts y tienen
lerra ejerercida por ticula, To1
de los otros principios y por 10 nrismo quedar eliminado (seceion 16.5). Por ahora, las primera y tercera leyes de Newton, la ,; del paralelogramo para la adicion y el principio de transmisibilidad proporcionaran las bases neoesarias y suficientes para el estudio complede la estatica de particulas, de cuerpos rfgidos y de sistemas de cuerrfgidos. Como se dijo antes, los seis principios fundamentales ennnoiados zmba se basan en la evidencia experimental, A excepci6n de la primeley de Newton y el principio de transmisibilidad, todos son principios mdependientes yno se pueden obtener matematicamente de los dermis , de cualqmer otro principia Hsico elemental. En ellos descansa la maparte de la intrincada estructura de la meeanioa newtaniana. La aplicaci6n de estos principios fundamentales ha pennitido resolver, por mas dos siglos, un gran mimero de problemas relacionados can las condiciones de reposo y rnovimiento de cuerpos rfgidos, cuerpos deformay fluidos. Muchas de las soluciones obtenidas pueden comprobarse a3:m' mte experirnentos que proporeionan una verificaci6n ulterior de los ios en que se basaron, Fue s610 hasta el siglo pasado que se enque la mectinica de Newton tiene deficiencias en e1 estudio del , iento de los atomos y en el de ciertos planetas, y que debe comementarse con Ia teoria de la relatividad. Pero en la escala humana 0 Ja escala de la ingenierfa, donde las velocidades son mueho mas pe- que Ia velocidad de la lnz, la meoanica de Newton aiin no ha 51A •
podrla derivarse
1.3. Sistemas
de unidades
refutada,
• SISTEMAS DE UNIDADES los cuatro conceptos fondamentales introducidos en Ia secci6n anse asocian las Ilamadas unidades cineticas, es decir, las unidades :-ngttud, tiempo, masa y [uerza. Estas unidades no pueden escoger~ manera Independiente si la ecuaci6n (1.1) ha de satisfacerse, Tres pueden definirse en forma arbitraria, se les llama unidad.es ba. La cuarta unidad, en cambio, debe escQgerse de acuerdo can la 'on (1,1) y se le identifica como umdad. derivada. Se dice que las '-_l.HAO cinetioasasf selecdonadas forman lII1 sistema congruente de 'sterna Internaclonal de Unldades (Unldades del SI), t En esrna, que sera de usa universal cuando Estados Unidos complete amversion, las unidades basicas son las .de longitnd, masa y tiemp6, ...aman, respectivamente, metro (m), kilogramo (kg), y segund.o (s). tres estan definidas de manera arbitrar.i,a.EI segundo, que de rna=IDginal se eligi6 para representar 1/86 400 del ilia solar medio, se ahara como .laduracion de 9 192 631 770 ciclos de la radiacion =~Ia en la transicion entre dos niveles del estado fundamental del de eesio 133. EI metro, definido en forma oliginal como la diez~_"""". rna parte de la distancia del ecuador a nn polo, se define como 1 650 763.73 longitudes de onda de la luz naranja-roja co_ iente a cierta transicion en un atDll10 de Cript6n 86. EI kilograllle es aproximadamente igual a Ia masa de 0.001 m3 de agua, se como la masa de un patron de platino-iridio que se eonserva en . International de Pesos y Medidas en Sevres, cerca de Paris, •. ..,,..._',,,, unidad de fuerza es una unidad derivada y se llama netvtan " La -
partlcula,
(1.3) a-presarse
(1.4)
punto connoes realel punta eo ~e la Tierra, snte preciso cando en e1
:1 estudio de
K')loen la ley ton. El prinD nzar el es~ Newton se ~rcidas entre estudio de la 1'f de gravita~ easo partiCl1~ [l5misibili~ad
, de la Tierra.
St_rstblle lnlemfllicmtil d'UniUs (l'fances).
( ). Se le define (1.1) se eseribe
como
1 mIl- a una masa de un kilagramo
Ia fuerza que proporciona
una aceleraci6n
de
(ftgura L2). A partir de La ecuaeion
1 N = (1 kg)(1 mls2) =
1 kg
. m/s2
(1.5)
Figura 1.2
Se dice que las unidades del S1 forman un sistema
absoluto de untdades, esto sigItifica que las tres unidades basicas seleceionadas son independientes dellugar en dande se utilicen las rnedidas. El metro, el kilogramo y
eI segundo se pueden USaf en cualquier lugar de Ia Tierra; Incluso pueden usarse en otto planeta y siempre tendran el mismo signHlcado. Elpeso de un cuerpo, 0 lajue'rza de graoedad ejercida sabre el, debe expresarse en newtons, como cualquier otra fuerza. De la ecuaeion (1.4) se obtiene gue e1 peso de un euerpo de rnasa 1kg (figura 1.3) es
d.=
!HI) lII!s~
W:9.81 N
W=mg
= (1 kg)(9.81 = 9.81 N
rnls2)
FIgura 1.3
Los multrplos y submnltiplos de las unidades fundamentales del Sl se pueden obtener can e1 uso de los prefijos que se definen en la tabla 1.1. Los mriltiplos y submUltiplos de las unidades de Iongitud, masa y fuerza de- mayor uso en ingeuierfa. son, respectivamente, el ki16metro (Ian) y el rnil£metro (mm), eJ megagTamol (Mg) y e1 gramo (g); y e] kiloneunot» (kN). De acuerdo COD la tabla 1.1, sa tiene Lkm 1 Mg
= laOOm = 1000 kg
1 mm
= 0.001
1 g = 0.001 kg
lkN=lOOON
La conversion de estas unidades a metros, kilogram os y newtons, respectivamente, puede realizarse can s610 rec(Jrmr el punto decimal tres Iugares a la derecha 0 a la izquierda. POl' ejemplo, para convertir 3.82 km en metros, se recorre el punto decimal tres lugares a la derecha: 3.82
km = 3820
ill
En forma semejante, 47.2 mm sa convierten en metros recorriendo punta decimal tres lugares ala izquierda:
47.2 mm COil el usa de la notaci6n
el
= 0.0472
m
escribir
cientffica,
se puede
3.82 Ian
3.82 X 103
X
m
3
47.2 mm = 47.2
10-
Los rmiltiplos de la unidad de tiempo son el minuta (min) y la hom (h). Puesto que 1 min = 60 s y 1 h = 60 min = 3600 s, estes multiplos no pueden convertirse tan facilmente oorrro los otros.
Tainbleu couocida
CQnJO
tonelada metrica.
ion de maci6n
Tabla 1.1.
flmtor
Pre1ijos del SI
f.>refijo
-
1.3. Sistemas de unidades Sfmbolo
multiplicativo
(1.5)
!lidades; endien-
gramo y
eo pue-
~do.
eel, de:cuaci6n l 1.3) es
1000 000 000 000 = 1012 1000 000 000 = 101'1 1000000 = 106 1000 = 103 100 = 102 10 =:; io' 0.1 = 10-1 0.01 = 10-2 0.001 = 10-3 0.000001 = 10-6 0-000 000 001 = 10-1) D.OOD 000 000 001 = 10-12 0.000000000000001 = 10-15 0.000000000000000001 = lo-til
tera giga mega
kilo
T
G
hecto" declO
deoa"
M k h da
d
C
centi"
mill
micro
m
J.L
Jl
nanD
ptco femto ato
f a
Debe evitarse el usa de estes prefljos, excepto en las medrdas de m-eas y vohunenes y para nso no Menico del oentfmetro, como en las rnedidas referentes a la ropa y al cuerpo.
es del SI II la tabla
l masa y
IalOmetro ); y el ki-
Can el usa del multiple 0 submrilnplo adecuado de cierta unidad, se puede evitar la escritnra de mimeros muy grandes a muy pequefios. POT ejemplo, par 10 general se escribe 427.21qJ:i en lugar de 427 200 m, 2.16 mm en Iugar de 0.002 16 m.' Unidades de area y volumen. La unidad de area es el metro cua:Irndo (m2), que representa el area de un cuadrado de 1m de Iado, In znidad de volumen es el metro cubico (rn3), que es tgual al volumen de un
de 1 ill de lado, Para evitar valores numericos excesivamente
pe-
rtonS, res-
rima! tres
vertir 3.82
;penos 0 demasiado grandes en el calculo de areas y vohimenes, se usan memas de subunidades que se obtienen elevando, respectivameute, al ::mdrado y al cubo no s610 e1 milfrnetro sino tam bien dos subrmiltiplos ::ltBrmedios del metro, llamados decimetro (dm) y centimetto (em). Ences, par definicion,
leTecha:
1 dm 1 em
1 mm
= 0.1 m = 10- m = 0.01 m = 10- m = 0.001 = 10-3 m
1 2 ill
oniendo el snhrmiltiplos de la unidad de area son
1 droll = (1 dm)1! = (10-1 m)2
1 eml! 1 mm2
=
=
(1 emf (1 mm)2
= (10-2 m)2 = 10-4 ]])2 = (10-3 m)1! = 10-6 mil
== 10-2 m2
snbrmiltiplos de Ia unidad de volumen son
Din) yla . esteS mul:li-
no-
1 elm3 = (1 run? = (10-] m)3 = 10-3 rn3 1 em3 =(1 em)" = (1O-c--2 m)3 = 10-6 rn3 1 mms = (1 mm)" = (10-3 m? = 10-9 rnS
Debe observarse que cuando se usaf) mas de euatrn dfgitos a ambos lados del punto decipara expresar una cantidad en unidades del Sl.,..--c:omo I;Il 427 200 moen 0,002 16--usarse espacios, no comas, pam separar los digt_tos en grupoi; de tres, Esto as con el I'm
Ii"'lbu confuslones con la coma, que se lisa en muohos paises en
Ingar
del punto decimal.
Debe notarse que cuando se mide el vohnnen
de un lfquido, e1 decfrrre-
tro ctlbico (dm") se conoee en forma usual COTllO UD Utro (L). En la tabla 1.2 se muestran otras unidades derrvadas del SI, que se usau para rnedir el momenta de una fuerza, el (Tabaja de una Iuerza, etcetera. Aunque estas unidades se Introduciran en capitulos posteriores conforme se vayao necesitando, es necesario descrihir una regia irnportante en esta fase: cuando se obtiene una unidad derivada can la division de una unidad basica entre otra unidad basica, debe usarse U11 prefijo en e1 numerador de Ia unidarl derivada pero no en su denominador. Par ejemplo, 1a constante k de un resorte que se elanga 20 mm bajo una carga de 100 N se expresara como
lID patr6n ( -mtitute of e 0.-1 acci6n gF.
pecifica que
latitud (
bra. Es dan
lID
s:iste
'miVitacionaJ
'!:mol.
Aun ens
en traJt k
100 N 20mm
_l_O_O_N_= 5000 Nhn 0.020m
=,5
kN/m
- en
ciku.I
mtidades hal
fuerzad
pero uunea como k
= 5 N/mm.
a La fuel ~ft!~
(fig
Unldades de uso coman en Estados Unidos. La mavorfa de los ingeuieros practicantes estadounidenses todavla utilizan unsistema en el que las unidades basicas son las unidades de longitud, fuerza y tiempo. Estas unidades son, respectivamente, el pi« (ft), la libra (lb). y el segundo (5). El segundo s identico a 1. correspondiente unidad del SL El pie se define como 0.3048 m. La libra se define como el peso de
Soeg11n 1a e yel~ c&se.le una f y 1ftJs2
s:lug.p
ootiene Tabla 1.2.
Cantidad
Principales
unidades del SI usadas en rnecanica
Unidad
S(mbolo
Formula
Aceleracion
Metro 11m segundo at cuadrado
Angulo
Aceleraeion angular Veloeidad angular
Area
Raman
rad
rad/52
Radian por segundu
Densidad
Energia
al cuadrado Radian por segtllldu Metro cuadrado Kilogramo Tlor metro cuhico
rad/s
mo
Joule
Newton Hertz Newton-segundo Metro
Fuerza Frecuenela Impulse Longitud Masa Momenta de una fuerza Poteneia Presion Esfuerzo Tiempo Velocidad
Volumen
kWm3
'm
kg' mJs~
S-l
lIz kg
kg·m/s
ill
Kilogmmo
Newton-metro Watt Pascal Pascal Segundo Metro por segundo Metro cubieo Litro
t
N'm J/s
N/llf N/m~
Pa
Pa
Illis
Solidos Lfquidos Trahajo
I 1
Joule
Unidad suplernentarla (J revoluclon = l'IT rad = .36()O). Unidad basic a,
:ime-
:;3.,
ue se et-
riares
mpor!
cliviJrenjo
~r.POT
patr6n de platina, Ilamado libra estdndar, que esm en el National Institute of Standards and Technology en Ias afueras de WashmgtoD. su masa es 0.453 592 43 kg. Como el peso de un cuerpo depende de la atracci6n gravifacional de la Tierra, la enal varfa con la ubicaci6n.. se es-xriBca que fa libra estandar debe estar localizada ill nivel del mar y a ana latitud de 45° para definir en forma apropiada una fuerza de una liEs clare que las unidades de usa comiin en Estados Unidos no forman un sistema de unidades absolute. POl' su dependencia de la atraccion _ itaclonal de la Tierra constituyen un sistema de unidades gravita110
I .3_ SisletrulS
de unidades
na car-
t;;:mnl.
=asa
la libra estandar se emplea tambien como unidad de en transaeciones comerciales en Estados Unidos, no puede usarse , en calculos de ingenieria, debido a que no sena consistente oou las mridades basicas definidas en el apartado anterior, De heche, cuando Aun cuando
p
>,oria de sistema fuerza V bra (Ib), lidad del
fuerza de Llb aetna sobre la libra estandar, es deeir, cuando esta sua 1a fuerza de gravedad, recibe la aeeleracion de la gravedad, g = :.2 £tIs2 (figUIa l.4), esta no es la unidad de aceleracion que se requieseglin la ecuaci6n (1.1). La unidad de masa consistente con el pie, Ia r el segundo es la masa que recibe una aeeleracion de 1 ft!s2 al aplie una fuerza de lIb (£igura 1.5). Esta unidad, algunas veces llaslug. puede derivarse de Ia ecuaci6n F = rna despues de sustituir
Ei' c: 1
IL
Figura
1.4
y 1 ftls2 para F y a, respectivamente. Se escrihe
F=ma 1 1b = (1 slug)(l It/s2)
F", lib
lpeso de
~ obtiene
Figura
1.5
1 s1 ug
:Ormula
lIb = ~~1 ftls2
"1ft = 1lb . s"
(1.6)
do las figuras 1.4 y L5 se concluye que e1 slug es una rnasa -eces mlilYor que la mas a de Ia libra estandar, El hecho de que en el sistema de usa comrin en Estados Unidos, :terpDs se caraetericen por su peso en libras en Iugar de pOl' su masa ~> sera ventajoso en el estudio de la estatica, en donde 5e tratara en continua can pesos y otras fuerzas, y solo en ocasiones con ma-in embargo, en el estudio de la dinamica, donde intervienen fuerasas y aceleraciones, la masa m de un cuerpo se expresara en slugs , su peso W e5M dado en libras. Recordando la ecuaeion (1.4) se
kglm3 N·m kg' rnls'l
S
-1
kg' m/s
1
t
l
rn=-
w
a n
(1.7)
·m
Nhn2
J/s N/lll~
m/s
m3 10-3 m:'
T·m
~oCiUJlIO~
~ es Ia aceleraci6n de 1101 graved ad (g = 32.2 ftls2). !3S tmidades de uso eomtin en Estados Unidos que se presentan frecuente en problemas de ingenieria son Ia mdla (mi), igual t; 1a pulgada (in), igual a 1/12 ft; YIa kilolibra (kip), igual a una ~ 1000 lb. Latonelada se usa can frecuencia para representar de 2 000 lb pem, al igual que 1a libra, debe convertirse a slu.gs ciIculos de ingenieria. conversion en pies, libras y segundos de cantidades expresadas nnidades de us!') corrnin en Estados Unidos, en forma general eomplicada y requiere mayor atencion que la cperacidn corresen las unidades del 51. Por ejemplo, si se da la magnitud de
Fotografla 1.2 La unidad de masa es la unica unidad basica que aun sa define can un patr6n flsica. En la actualidad S8 trabaja para reemplazar este patron par una basada en un len6mena natural inalterable.
una velocidad como v
30 rni/h, se convierte
en ft/s de Ia siguiente rna-
nera. Primero se escribe
v
== 30-
mi
recordanr
Puesto que se quieren convertir millas en pies, S8 debe multiplicar el miembro derecho deIa ecuaeien par una expresion que contenga millas en e1 denominador y pies en el numerador, Pero, como 00 se quiere camhiar eJ valor del miembro derecho, Ia expresion implicada debe tener till valor igual a una; el cocieute (5280 ft)/(J. rni) es una expresion de este tipo. Haciendo una operacion semejante para transformer la unidad bora en segundos, se eseribe
Unidad
Unidos I es (1.6), slug =. medio
= (30
mi)( .5280 ft)( 3 1 h) b
Lrni
600 s
Realizando los calculos uumericos y cancelando las unidades que a_parecen tanto en 81 nnmerador como en e1 denorninador, se obtiene v
= 44 -
ft s
= 44 ftls
Pam COD en unida ;;d:=res de c
1.4. CONVERSI6N
DE UN SISTEMA DE UNIDADES A OlRO
Existen muchas situaciones en las que un ingeniero necesita convertir en unidades del SI un resultado nurnertco obtentdo en unidades de usa cormm en Estados Uoidos 0 viceversa, Como la unidad de tiempo es la misma en ambos sistemas, s610 se neeesita convertir dos unidades cineticas basicas y. puesto que todas las on-as rmidades eineticas pueden derivarse de estas unidades basicas, solo sa requiere recordar dos factores de conversion.
Unidades de longitud. Por d £nicion, la unidad de longitud de usa connin en Estados Unidos es
delSI,
denru
1 It =0.3048111
Fol.ografia 1.3 No se puede- exagerar la lrnportancia de. incluir unidades_ en todos los caleulos, Se eneemre quael satalita climalo!6gico para Marte.. con un ceste 'de 125 mlllones de d6lares. faJ16al ingresar a la orbita alrededor de Mart.s porque el principal confratista nabra proporclcnado el equipo de navegaci6n con dales operativos basados en unidades de uso cermin en Estados Unidos, en lugar de las especificadas del S1.
(1.8)
de aquf
se bene
que
1 rni
0
5280 ft
5280(0.3048
rn) = 1 609 m
bien 1 mi
= L609
km
(1.9)
Tambien 1 in
= -& ft = 11(0.3048
1 in = 25.4
rn)
0.0254
Ll1
o bien
mrn
(LID)
Unldades de. fuerza. Recordando que la unidad de fuerza de use cormin en Estados Unidos (la libra) sa define como el peso de una libra estandar (de rnasa 0.4536 k:g)a1nrvel del mar y alma latitud de 45° (donde g = 9.807 m/s2) y usando la ecuacion (1.4), se escribe
urte rna-
W=mg lIb = (0.4536 kg)(9.807 m/s2) = 4.448 kg . mls2
0,
1.5. Metodo pam la soluci6n de problemas
11
recordando
la ecuaci6n
(1.5) (l.11)
puear el ga millas e quiere debe te~"presi6n ar Ia uni-
Unldades de masa. La unidad de masa de usa cormin en Estados Unidos (el slug) es una unidad derivada. Asf, can el usa de las eeuaciones (1.6), (1.8)
y (1.11), se puede escribir
11 lIb 21ft s ug = .s
1ftls2 = 0.3048 mls2
Llb
4.448 N
14.59 N . s2/m
y par media de la ecuaci6.n (1.5)
(1.12)
ue apare\unque no puede usarse como unidad consistente de masa, recordando e la masa de la libra estandar es, par definicion,
ne
1 libra rnasa
0.4536 kg
(1.1.'3)
uta constance se pu de usar para determinar la masa. en unidades del Sf (kilogramos) de un CLlerpo que este caracterizado par su peso en uni"RO
. convertir
Ies de usa lmpo es Ia
ades ciaemeden deos factores
.-Jadesde uso comtin en Estados Unidos (Iibras).. Para convertir una unidad derivada de usa carotin en Estados Umen unidades del SI, simplemente se multipl:ica a se divide par los ores de conversion apropiados. Par ejemplo, para convertirel mota de una fuerza que .ha side encontrada como M = 471b· in en unies del SI, se usan las formulas (l.IO) y (Ll I) Yse escribe
47 Ib . in
= 47(4.448 = 5 310 N
N)(25.4 rum) . mm
= 5.31 N . m
Jngitud de (l.8)
Los factores de conversion dados en esta seceton se pueden usaf ien para convertir un resultado numerico obtenido en las unidades 51 a unidades de usa cormin, en Estados Unidos. Por ejemplo, si el menta de una fuerza se encontr6 como M = 40 N . lTI, can el proce...:mientausado en el Ultimo parrafo de la seccion 1.3, se escribe
M ::::40 N. . m ::: (40 N . rn) ( . llb . 4.448 N
)(
0.3048 m
1ft
- in
realizar los calculos numerieos y cancelar las unidades que aparecen en el nurnerador como ell el denominador, se obtiene M = 29.5 Ib . ft
(1.9)
Las unidades de usa connin en Estados Unidos que se emplean can .:or frecuencla en la mecaniea, y sus equivalenres en las untdades del se enlistan en la tabla 1.3.
u.u»
ierza de USQ de una libra le 45° (don-
ETODO PARA LA SOLUCION DE PROBLEMAS ~ problema en mecanica debe abordarse de La misma rnanera en que plantearfa un problema real de ingenieria. S~ se toma como base la . . neia y la :intu:ici6npropias, sera mas facil entender y formular 81 ema. Sin embargo, una vez que el problema se ha estableoido en
12
'ntroda:ciOIl
Tabla 1.3.
Unidades de uso comun en Estados Unidos
y sus equivalencias en unidades del SI
Cantidad Unidad de usc cornun en Estados Unldos Egulvalente del 51
Aceleracion
ftlsz ft2
in!!
Area
Energia Fuerza
in/52
0.3048 mls2 0.0254 mls2 0.0929
645.2
m"
tlllIJl!.
It ·lb
kip
1.356
Ib
4.448 kl 4.448 N
0.2780 N
(JZ
Impulse Longitud
lb· s ft
in
Masa
rni
oz rnasa Ih masa sLug
ton lb· ft
4.448 N . s 0.3048 m 25.40 mm 1.609 km 28.35 g 0.4536 kg
14.59 kg
907.2 kg
1.356N·T!l
M omento de una Inerza
lb·
in
0.U30 N - ill 0.41 62 X Wi; mm-l 1.356kg' m2 4.448 kg . mJs L356W 745.7W 47.88 Pa 6.895 kPa 0.3048 rnls 0.0254 m/s 0.4470 m/s 1.609 km/h 0.02832 rns 16.39 em.'! 3.785 L 0.9464 L 1.356 J
Momento de inercia de un ares de una masa Cantidad de movimiento Poteucia Presion
0
in~
11·ft·52 lb· s ft· lb/s
lip
esfuerzo Vdocidad Iblfr 1b/in:1 (psi) Itls in Is
Volumen Llquidos 'Iraha]o forma dam,
mi/h (mph) mi/h (mph) ft3
in3
gal
crt
Ft· Ib
no hay sitio para suposiciones particulates. La soluvi6n se debe basar en los seis prtnciptos fimdame'tltales establectdos en 10 seccion 1.2 0 en los teoremas derioados de estos. Cada paso debe estar justificado COI1- estas bases. Deben seguirse reg1as estrictas que conduzcan a Is solueion de Lilla manera casi auromatica, sin dejar 111gar para la intuici6n 0 "sentimientos" particulates. Despues de obtener una respuesta, esta debe veriflcarse, Aqul, de nuevo, se puede utilizar el sentido coimin y la e).'P riencia personal. Si el resultado ohtenido DO es cornpletamente satisfactorio. debe verificarse en forma cuidadosa la formulaci6n del problema, la validez del metodo utilizado para $U soluci6n y la exactitud de los ca!Cl1] os, EI plaraeamieiuo de un problema debe ser clare Ypreciso y conte-
ner los datos proporcionados, asf como indicar In informacion que se requiere. Debe incluirse un dibujo claro que muestre todas [as cantidades involuc:radas, as] como un diagram a para cada uno de los cuerpos que participan, que indique en forma clara las fuerzas que actuan sobre ellos. A estes diagram as se les counce como diagramas de cuerpo libre Y se describiran en detalle en las secciones 2.11 V 4.2. Los prinoiptos [undamentale« de la mecartica que se enlistan en la seccion 1.2 se empleas: para escrib'ir ecu{lci.ones que expresen las condicio-
de reposo a movrmiento de los cuerpos considerados. Cada ecuadebe estar relacionada en forma clara con uno de los diagram as de _',,,"""'" libre. Despues se procedeni a resolver el problema. observando erma estricta las reglas usuales de algebra y con el registro minuoiolos diferentes pasos dados. Despues de haber obtenldo la respuesta, esta debe comprobarse con ) cuidodo. Con frecuencia se pueden detectar errores en el razona- to mediante la verfficacion de las unidades. Por ejemplo, para deerminar el momenta de una Iuerza de 50 N sabre nn punta a 0.60 m so linea de acci6n. se eseribirfa (seccion 3.12) M
s
1.6_ Exactltud numeriea
13
= Fel = (50 N)(O.60
m) = 30 N . m
m ·m
znidad N . ill que se obtiene a1mnltiplicar newtons por metros es La d correeta pm·a el momenta de una fuerza, si se hubiera obtenido ena otra unidad, se sabrfa que se cometi6 lUI error. Los errores en el calculo por 10 general se encontrauin ill sustituir valores numericos en una ecuacion que no haya sido usada y verifisi la ecuacirin es correcta. No es posible exagerar la importaneia de ci.lculos correctos en tngeniena.
EXACTITUD NUMERICA
"ados.
esactitud en 1a .olucien de un problema depende de dos factores: exactitud de los datos proporcionados y 2. Ia de los calculos desaLa soluC:i6n no puede ser mas exacta que el menos ex-acto de estos factores, por ejemplo, si se sabe que Ia carga de un puente es de JO Ib can UTI posible error de 100 lb. el error relative que mide el de precision del dato es ... O~~lb 15 00
100Ib
= 0.0013
= 0.13 por ciento
ees, al oalcular Is. reaeclon en uno de los soportes del puente no
.!ria sentido anotarla como 14322 lb. La exactitud de la soluci6n no !ICiOfl. se
l
In sec-
"Star juSnduzcan I.f3. la in-
respues. sentido compleformulacion y la
y conte[ue
se remtidades .rpos que bre eUos.
fibre
S8
en la seceondicio-
e ser mayor de 0.1.3 par ciento, sin importar can que exactitud se los calculos, y el error posihle en Ia respuesta puede ser tan ecome (O.13/100)(143221b) = 20 lb. La respuesta deberia escri_ como 14320 ± 20 Jb. En. los preblemas de ingenierfa los datos Tara vez se conocen can exaetitud mayor a 0.2 por ciento, por 10 que casi nunea se justifica rihir las respuestas a diehos problemas con una exactitud mayor a 0.2 ciento. Un criteria practice es usar 4 cifras para registrar rnimeros ~ inlcien can nn ''1'' Y 3 cifras en todos los otros Casas. A menos que clique otra cosa, los datos proporcionados en un problema deben -....,.-..n·...,eomo conceidos con un grado de exaetitud comparable. Par c plo, una fuerza de 40 lb se deberia leer 40.0 lb. Y una £ilel'Za de 151b ieberta leer 15.00 lb. . ingenieros y estndiantes de .iugeniena comunmente usan.las calouras electronicas de bolsillo. La exaetitud y velocidad de estss facilita cilculos numerieos en la soluci6n de muchos problemas. Sin embargo, estudiantes no deben regisb-at· mas cifras significativas de las que se justiflear, :;610 porq11e estas se pueden obtener facilmente. Como encion6 con anterioridad, una exactitud mayor que 0.2 por ciento . vez·es necesaria 0 significativa en 1a solucion de problemas practi~n
e ingenierfa,
Ia fotogTafia se muestra el radiotelescoplo de disco s1mple·mas grande del I'nl,lndo ublcado en Arkibo, Puerto . EI disco esferico reflejante de 305 m de diametro cubre un area aproximada de 20 acres. Sobte el reflector se ntra suspendlda. una.plata:forma d!! 900 ton, debaJo de a cu~1~sti un br~zo azim tal de 328 pies de largo. este caPItulo sa apren~e~aqlJe, considerandb a Is philtaforl118 90mo Un.a PIlt1f la ell equlllbrlo; sera poslble inar !astensl()nes ell fos cables de <'Ipovo.
2.1. INTRODUCCION ESTA
T1CA DE PARTICULAS
2.1 2.2 2.3 2.4
2.5
2.6 2.7 2.8
2.9
2.10
2.11
2.12
2,13 2.,14 2.'15
Irrtmducci6n Fuerzas en un plano Fuerza sobre una particula. Resultants de dos fuerzas Vectores Adici6n 0 suma de-vectores Resultante de varias fuerzas concurrerrtes Deseomposipi6n" de uO~ 'lIel'Z~ en sus c€linponentj3s Componentes reatang.ulares de Una fuerz.a. Vectores uoiterios AdiGi6n de Iuerzas sumando sus c(;)mponentes )( y' y, Equilibria de. una partreula Prlrnera ley del mavlmiento de Newton Problemas relaclonados con el squlllbrie de una pajt{cula. Diagramas de cuerpc libra Fuerzasen el espacio Componentes reetangl,Jlare$ ete una fOerza en el espacio Fuerza defltrlida en 1etinin0S de su magnitud y des puntas sabre su lillea- de sedan Adici6n de fuerzas cencurrentss en el espacio Equlllbri,Q de una partTcula erl el e,spacio
que acnian sob mas fuerzas q_ actrian sabre una parncula pOT una sola fuerza que tenga el mismo efe-. to q_lle ellas, Esta fuerza equivalents sola en la resuliame de las fuer:z::.. varias qu!3 actiian sobre Is partfcula, Despues se derivaran las relaelo que existen entre las dtstintas fuerzas que actuan sobre una parnoula . un estado de equilibria y se usaran para determiner algunas de ills fu r_ zas queactiian sobre dicha partfcula, El usa de la palabra partioula no sigrufica que este capitulo se lim, teal estudio de peqnenos corpusculos. Quiere decir que el tarnafio Y _ forma de los cLlelpos en consideracion no afectara en 1a solucion de lc. problemas tratados en este capitulo, y que todas las fuerzas ejercidas bre un cuerpo dado se supondran aphcadas en un rnismo punto. Pu . que tal suposioion se verifica en muchas aplicaciones practicas, se podn resolver un buen numero de problemas de mgel.lieria. La primera parte del capitulo 85M dedieada al estudio de las fue:-zas eontenidas en un mismo plano y la segunda al analisis de las fuerza, en el espacio tridimensional.
Ell este capitulo
se estndiara
las particulas. Primero se aprendera a sustituir dos
el efecto de las fuerzas
FUERZAS EN UN PLANO
2.2. FUERZA SOBRE UNA PARTiCULA.
RESUlTANTE DE DOS FUERZAS Una fuerza representa la acci6n de un cuerpo sobre otro y se caract za por su punta de aplicaci6n, 'frlItgl1itud om4dflladirecoidn. Perc t fuerzas sabre una partfcula tienen el mismo punta de aplicaeion. P tanto, eada fuerza considerada en este capitulo estara eompletament definida por su magnttud 0 m6dulo y direecion. La magnftud 0 modulo de una fuerza se caraotariza por cierto mime ro de unidades. COlDO se indic6 en eJ capitulo 1, las unidades del SI usada por los mgenteros para medir la magnitud de unafuerza son e1 newton (, Y lin miiltiplo el kilooewton (kN), igual a 1 000 N, mientras que las uniclades del sistema de usa eomrin en Estados Unidos, empleadascon c mismo fin, son Ia libra (lb)y su mUltiplo la kilolibra (kip), igual a 1 (4) lb. La direcci6n de una fuerza se define por la linea de occ.:i6ny el sentido de laJuerz.a. La linea de aecion es la linea recta infinita a [0 larg de la cual act6a la fuerza, se caracteriza por el lingula que forma conalgtm ejefijo (B,gura 2.1).
Figura 2.1
n.)
b)
16
ill
sobre
rzas que
mo efeci fuerzas
~laciones tfculaen
do de la fuerza debe indicarse
la magnitud de Ia Iuerza, Finalrnente, 81 sentipOI' una punta de flecha, En la definicion de una fuerza es importante indicar su sentido, Dos fuerzas como las mostradas en las figuras 2.10, y b, que tienen la misma rnagnitud y la misrna lfnea de a:cci6n pero.diferente sentido, tendranefectos opuestos samento para representar
La fuerza eo S1 se representa par un segmento de esa linea; mediante el use de una eseala apropiada, puede escogerse la longitud de este seg-
2,3. Vectof8S
17
las fuer) se liminano
y Ia on de los
rcidas soo. Puesto Ie podran
La evidencia experimental muestra que dos fuerzas P y Q que achian sobre UIUl pamcula A (figura 2.20), pueden sustituirse por una sola erza R que produce el mismo efecto sobre Ia partioula (figma 2.2c). _\ esta fuerza se Ie llama resultante de las fuerzas P y Q Y puede obtenerse, como se muestra en la :ligma 2.2h, construyendo lID paralelogramo ron P y Q como lados. La diagonal que pasa por A represenia In.resultante. Esto se conoce como Ia ley [lid paralelogramo para la adici6n de s fnerzas, y se basa en la evidencia experimental; no puede probarse ni derivarse de 'm an era matematica,
bre una particula.
a)
las fuerloS Iuerzas
2.3. VECTORES En aparieneia las fuerzas no obedecen las reglas de la adlcion definidas =n [a aritmetica a en el {ugebra ordinarias, Por ejemplo, dos [uerzas que , an formando un angulo recto, una de 4 lb Y otra de 3 lb, surnan W1H _ rza de 51b y no una de 7 lb. Las Iuerzas no son las iinicas cantidaque slguen Ia ley del paralelogramo para la adici6n. Como se vera !Iffis adelante , los desplazamientos, celoeidades, aceleraciones y mo-wntos son arras ejemplos de cantidades Ifsicas qlle poseen rnagnitud y di:recci6n y que se suman siguienda la ley del paralelogramo. Estas cantidades pueden representarse marematicamente por ueciores, mientras e aquellas eantidades fisicas que no tienen direecion, como oolumen, uua 0 energia se representan par numerus ordinaries a esoalares. Los vectores se definen como expresiones matemdiicas qrle poseen ~nitud, clirecci6n y sentido, los cuales se sumlZn de acuerdo con 10 ley paralelogramo. Los vectore se representan par flechas n las Ilusclones y se distinguen de las cantidades escalates en este texto me'1iante el usa de negtitas (P). En la escritura a rnanc, un vector puede cterizarse d!bujando una pequena £lecha arriba de la letra 'usada para -q>resentarlo (P), o subrayando la letra (E). La magnitud de un vector ernrina [a longitud de la flecha correspondiente. En este libro se usa:an letras cursivaspara representar fa ruagnitud de un vector. Asi, la mag=ibId del vector P se representa como P. Un vector con el qu€: se representa una fuerza que acaia sabre una Icula tiene un punta de aplicaci6n bien definido, a saber, la partfoula . mao A tal vector se le llama vector fija 0 Zigaclo, y no puede cambiarsu posicion. sin modificar las condiciones del problcrna, Sill e=bargo •
b)
earacteri-
•• Pero las
cion. POT etamente uto mrmeI I usadas leWton (N) De las uni-
.A
c)
Figura. 2.2
tdas con el ;ml a 1000
In yel sellLa 10 largo 'rna con al-
..aas cantidades Hsicas. como los pares (vease capfrulo 3), se pneden re-
..
sentar por vectores gue pueden moverse Iibremente en el espacio, estes vectores se les llama vectores libre«. Existen otras cantidades . as, como las fnerzas sabre lID cuel-po dgido (vease capitulo 3), que tan representadas por vectores que pueden moverse 0 resbalar a 10
18
Estal.iI::a de ~
l'
'i / /
FIgura 2.6
largo de su lfnea de accidn, aestos se les concce como vectores deslizantes.t Dos vectores de la misma magnitucl direcci6n y sentido se dice que son igtwles, tengan a no el mismo punta de aplicacioa (figt.tra 2.4); los vectores iguales pueden representarse por la misma letra, El vector negativ-o de un vector p. se define COOlO aquel gue tierra la misma magnitud que P y una direecien opuesta. a la de P (figura 2.5); el negativo del vector P se representa par - P. A los veetores P y - P se les llama veetores iguales yopuestos. Se tiene
p
(-P)
2.4 ..ADICION 0 SUMA DE VECTORES
En [a seceion anterior se via que:,.par definicion, los vectores se suman de acuerdo can la ley del paralelogramo. Asf', la suma de dos vectores P y Q se obtiene uniendo los dos vectores al mismo punta A y construyendo un paralelogrnmo que tenga par lados a P y.a Q (.figw:a2.6). La diagonal que pasa por A repre5enta la suma vectorial de P y Q, y se representa par P + Q. El hecho de que el signo + se use para represen tar tanto la suma vectorial como Ia escalar no debe oausar .ninguna confusion, 51 las cantidades vectoriales y esealares siempre se distinguen con. cuidado, De esta manera, se debe notar que Lamagnitnd del vector P + Q no as, en general, igllal ala suma P + Q de las magnitudes, de los vectores P y Q. Puesto que el paralelogramoconstruido can los veetores P y Q .no depende del orden en que P y Q se seleccionen, se concluye que la adicien de dos vectores es conm.utativa y se escribe (2.1)
, Alguua.~ expresiones lien en .I'fmgrutud y direoci6n poro no se suman de acuerdo 0011la ley dHI J!aralelogramo. AWlqU& tales expreslones se pueden representar per medic de f1ecltu.~, no lie p ueden cans id emf vecto res, Un grupo de expresiones de este trpo son las rotaclenes Bnitas de Ull cumpo rlgido. Coleque un lihro eerrsdo enfrente de usted sehre una mesa de m~IWrII que se encuentreen Infonna habitual ..COil La portada hacta arriba y 1'1lome hncia la izqulerda. Ahora rote cl ltbro 181)0 con respecto a un paralelo al lome (6gurli 2.3 a); esta rotaeiou puede ser representada par una Ilecha orieueada, CO!110 se muastra en la figura. cuya longitudes igual a 180 unklades ..Tomando el llbro tal y como se encueutra en su nueva posiclrin, rdtelo ahara 1'80°;ili'ededar de till eie
,*',
Ii:iU"
(I)
Rolaciones finitas de un cuerpo rfgido
b)
Figura 2.. 3
s desUlice que 2.4); los
ne bene nra 2.5); y -Fse
partir de la ley del paralelogramo se puede obtener otro metoda ra determinar la suma de dos vectores. Este metodo llamado regIa del .::ngulo se obtiene como sigue: eonsiderese la fignra2.6 donde Ia su- de los vectores P y Q ha sido determinada par la ley del paraleloo. Puesto que ellado del paralelogramo opuesto a Q es igual a Q agnitud y direecion, se podria dibujar s610 Ia mitad del paralelografigura 2.7a). De esta manera, la suma de los dos vectores puede entrarse colocando P y Q de punta a cola y uniendo la cola de P con nta de Q. En la figura 2.7b se considera Ia otra mitad del paraleloy se obtiene el mismo resultado. Esto conflrma el hecho de que suma vectorial es eonmutativa, La Testa de un vector se define como Ia adicion del vector negativo ......... aespondiente. De manera que el vector P - Q que representa la dicia de los vectores P y Q se obtiene agregandole a Pel vector ne~ -Q (figura 2.8). Se escribe P- Q
2.4. AdlclQI'I 0 suma de vootores
19
e suman
b)
Figura 2.7
clore!; P
istruyen. La diaQ. y se ra repre-
+ (-Q)
(2.2)
~se debe observar otra vez que aunque se usa e) mismo signa para npresentar tanto la sustraocion vectorial como la escalar, se evitaran con. nes si se tiene cuidado en distinguJr entre canfidades vectoriales y
ninguna
fstinguen iel vector itudes de
i' Y Q no
esealares,
Ahara se considerara la suma de tres a mas cectores. La suma de vectores P, Q YSse obtendra, par definicion, sumando primero los -etores P y Q y agreganclo e1vector S aI vector P + Q. De rnanera que P
a}
Figura 2.8
b)
+ Q + S = (P + Q) + S
(2.3)
ne la adi-
(2.1)
forma semejante, la suma de cnatro vectores se obtiene agregando cmuto vector a la suma de los tres primeros. Par consigutente.Ja sude cualquier nrimero de vectores se puede obtener al aplicar en forrepetida Ia ley del paralelogramo a pares sucesivos de vectores, basta _ae todos los vectores sean sustitnidos par uno solo.
:ml
la ley del
I1/J
'echas.
• {I.
se
Coloque
Ila1onllaha180" con res-
tad.. por una dEs.Toman· :lnr de LLneje
ntal perpendicular al lcmo (B.g.rra 2.3bl; esta segunda rotacirin pnede ser representada medic de una Ileeha cuya!ongitud es igual a 180 unldades, oriontada como se muestra ell Jgurn. Sin embargo el libm podrta haberse eolocado en esta posicion £nal aphcando una so- rotaci6n de 180" con respecto a un eje vertical (llguTa 2.30). Se eoneluye que In suma de las mtaciones de 180" mp resentadas POy {] echas diri gidas, respeotwamerrte, a 10 largo de los - z y X, es una rotacton de 180" reprosentada poI una flecha dirigida a 10 largo dele]e y (fl_=t 2.3dl. Es obvic que las rotactoues Anitas de uu CUetpO rfgiclo 00 obedeeeu Ia ley del paramo para la 'lldici6n; por tanto, 6stas no pueden ser representadas por medic de vectores.
YI
180"
Z c)
/
:r
d)
A
Figura 2.9
Si los vectores dados son coplanares, es decir, si estan contenidos en el mismo plano, su suma puede obtenerse facjJmente en forma gnifica. En ese caso, se prefiere la aplicacion repetida de Ia regIa del triangolo en vez de la ley del paralelogramo. En la figura 2.9la suma de los tres vectores P, Q y Sse obtuvo en esta forma, la regla del mangulo se aplioo primero para ohtener la suma P + Q de los vectores P y Q; y volvi6 a aplicarse para obtener la suma de los vectores l' + Q y S. Sin embargo, Ia determinacion del vector P + Q pudo .haberse omitido; obteniendose directamente In suma de los tres veetores, como se muestra en la Bgura 2.10, aoomodandn los uectores en la formf). de cola a punta y coneclando La cola del primer nectar am ill punta del ultimo. Esta se conoee COlllO la regl.a del po1£gono para Ia adicion de vectores. Se observa gue el resnltado obtenido pennaneceria sin camhio si, como se muestra eu ill figura2<1l, los vectores Q y Sse hubieran reemplazado par la suma de Q + S. Entonces se pnsde escriblr
=p
A
+ (Q+S
(2.4)
FIgura 2.10
tiva. Es irnportante
expresa el heche de gue III adici6n de vectores es asociareeordar gue ya se demostro que Ia suma vectorial de dos vectores es tam bien cournutativa, por 10 que se escribe esta ecnacion
J.>
+Q +S =
=
(P S
+ Q) + S
=S
+ (Q + P) = S + Q + P
+ (P + Q)
(2.5)
A F.igura 2.11
Esta expresi6u, junto COD otras que pudieran obtenerse en Ia misma forma, muestra que el orden en que se sumen varios vectores no importa (figura 2.12). Producto de un escalar y un vector. Como es oonveniente representar Ia suma P + P como 2P. a la surna P + P + P como 3P, Y en general a la suma de M. vectores P iguales COIDO el producto nP, se defimra el pwducto nP de un eutero positive n y un vector J.>, como un vector que tiene la misma direcci6n que P y magnttud 'nP (lease n VBces P). A1 ampliar esta definicron para incluir a todos los escalares y si record amos la definicion de un vector negativo dada en la seecion 2.3, se define el producto kP de un esc-ajar k y un vector P, como un vector que tiene la misrna direccion y sentido que P (si k es positiv~), 0 la misrna direction pero sentido opuesto al de P (si k es negativo) y una magnitud igual al producto de P Y el valor absoluto de k (figuTa 2.13).
Figura 2.12
2.5. RESULTANTE
DE VARIAS FUERZAS CONCURRENTES
Figura 2.13
Considerese una particula A sujeta a varias fuerzas coplanares, es decir, a varias fuerzas contenidas en el mlsmo plano (Figura 2.14a). Como todas estas fuerzas pasan por A, se dice qmil son concurrenres. Los vectores que representan las fuerzas que achian sobreA pueden sumarse con la regla del polfgano (figW'a 2.14h). Puesto que el usa dela regia del poIigono es equivalents a 1a aplicacion repetida de la ley del paralelcgramo, e1 vector R obtenido representa Ia resultante de las fuerzas eoncurrentes gue intervienen, es door, la fuerza que produce el mismo efeoto sobre la partfcula A que las fuet:zas dadas, Como se indica arriba, no importa el orden en e1 que se sumen los vectores P, Q y S que representan las fuerzas sabre Ia partfcula,
idos en
2.6. DescompoSlcI<:m
grafica.
iangulo
da una fuerza en sus componentes
21
los tres
e
aplic6
..-olvi6 a
nbargi), iendose
1a flgu, conec-
4)
b)
:If)
l'
A
/ / /
i'
2.14 .....
conoce
bio si, n reem.,_
b)
.....
(2.4)
DESCOMPOSICI6N DE UNA FUERZA S COMPONENTES isto que dos 0 mas Iuerzas que achian sabre una particula pucstituirse pOl' una sola fuerza que produce el mismo efecto sobre - Ia, De la misma manera, una sola fuerza F que aetna sohre una • ~ puede reemplazarse por dos 0 mas Iuerzas que produzcan jun-
.>":
c)
.............
\ \ \ \ \ \
s asociavectorial
Figura 2.15
(2.5)
.isma for-
~=r:tes
, importa
~"""'rtn~
uente renno :to 'IlP,
3P, y se
":lismo efecto sabre la partfcnla. A estas fuerzas se les llama comde la fuerza original F, y al proceso de sustituirlas en lugar de llama descom:posici6n de la juerza F en sus compocense». & este sentido, para cada fuerza F existe un mlmero infinito de de componentes. Los conjuntos de dos componeutes P y Q mas importantes en cuanto a aplicaciones practicas se refiere. en este caso, el mimero de Iormas en las que una fuerza F '" descomponerse en sus componentes es ilimitado (figura 2.15). s son de especialinteres:
A
como un iase n vealares y si
cci6n 2.3, un vector ,0 la mis-
una mag:.13).
Una de las dos componentes, P, se conoce. La segunda componente, Q. se obtiene aplicando la regIa del trhingulo y uniendo la punta de P a la punta de F (figura 2.16); 1a magnitud, la direcci6n y el sentido de Q se determinan graficamente a par trigono01etrfa. Una vez que Q se ha determinado, ambas componentes P y Q deb en aplicarse en A.
Se canoce la linea de acci6n de cada una de las componenies. La
Figura 2.16
ES
s, es decir, Como to-
Los vectounarse COD ~gladel po-
magnitud y el sentido de las componentes se obtiene al aplicar la ley del paralelogramo y trazando lfneas, por la punta de F, paralelas alas line as de acci6n dadas (Hgura 2.17). De esta forrna se obtienen dos componentes bien definidas P y Q, que pueden determinarse gnincamente 0 por bigonometria aplicando 1a ley de los senos. Pueden eneontrarse rnuchos otros cases, par ejemplo, cuando la dide una de las componentes S8 conoce y se bnsca que la magniotra sea 10 mas pequeiia posible (vease problema resuelto 2.2). los oasos se traza un tIi:ingu!o 0 un paralelogramo adecuado safufaga las condiciones.
ilelogramo,
meurrentes recto sabre no importa 'esentan las
Figura 2.17
PROBLEMA RESUELTO 2.1
Las dos fuerzas P y Q aohiau sobre el perno A. Deterrnfnese su resultante.
SOLUCION
R
SoJucioo granca. Dibuje a eseala un paralelogramo eon lados i.gual-esa P y Q. La rnagniilld y la direeci6n de la resultante se miden y se encuentra que son R=98 N a
= 35°
Tambieu puede usarse la regla del m.angulo. Las fuerzas P y Q se dibujan Je pWIta a cola y otra vez se obtienen Ia magnrtud y la dtreceion de ta resultante par me clition directa, R = 98 N R
=
98
'&35C
Soluciho trigoDometrica. Se usa otra vez la regla del tri:ingulo; los dos lados y el anguio de la resultante se conooen, Se apnea la ley de las cosenos,
R2. = p'e
HZ Ahara
+ Q2 - 2PQ
cos B
2(40 N)(60
= (40 N)2 + (60 N)2 -
N) cos 155<>
R= 97,73 N
COD
la aplicacion la ley de los senos. se escribe
Bq
sen A sen B --=~ Q R
--= 60
sell A
sen 1550 97.73 N
(1)
AI resolver la ecuacicn (1) para eI seno de A, se tiene
(60 N) sen 155"
sen A
97.73 N
~
"
Con la calculadora se obtiene primero el cociente, Iuego su areo seno y el resultado es
.2
= 15.04(1
'V
I I
D! =
20°
+ A = 35.04°
1
/
Can el usa de tres was 1.6):
significatiwlS petra escribir el resullado (vease seceion R
/I I\ I \ I '
= 97.7 N L!.3S,Og
....
Solucion trigooometrica gulo BCD y se calcula
alternativa.
=
Se constmye el triangulo rectan2.5,36 N 54.38 N
2
CD = (60 N) sen 25° BD = (60 N) cos 25°
AI.usar entonces el lTi:ingulo ACD, se obdene tan
A = ..=2:;:,5,;,,:.3;,,;;6_::Nc:..
94.38 N 25.36 R=--Otra vez, sen A R = 97.73 N
= 97.7
N s. 35.0
22
PROBLEMA RESUELTO 2L2
'teo
Un lanchon es -arrastrado por dos remolcadores. Si Ia resultante de las fuerzas ejercidas .por los rernolcadores as una fuerza d 5 000 Ih dirigidaa 10 largo del eJe del lanchon, determtce: a) la tension en cada una de las cuerdas, sabiendo que CI. = 45°, Y b) el valor de a tal que la tension en la cuerda 2 sea minima.
nales a
tra que
....
dibujan esnltanB~--~~~~+-_"~ ; los dos rose-nos.
"-
SOLUCJON
Q. 'Iensien para a == 45°. Soluci6tlgrdfica. Se emplea la ley del pamIelogramo; Ill. diagonal (resultante) S6 sabe que es igual a 5 000 TbYqnE' esta elirigida bacia la derecha; los lades se diliuj<ln paralelos a las cuerdas. Si el diblljO se hace a escala pnede medirse
11 = 3 (00)b
T'iJ. 2600 =
lh
Soluci6n trigonO-l1Ietrica. Puede usarse Itt regia del ttiilngulo. Observese que el triangulo raostrado representa Ja mitad del paralelogramo que se presenta arriba. Si se emplea la ley de los senos, seescribe 1'.1 T2
(1)
50001b
Con calculadora, primero se calcula y se almaoena el valor del ultimo oociente. Al multipllcar este valor sucesivamente par sen 45° y sen 30", sa obtiene T,
I seno
3660 Ib
Tg == 2590 Ib
yel
LSeseccion iO° ....
b.. Valor de a para T 2, minima. Para deterrninar el valor de Cl tal que la tension en la cuerda 2 sea minima se usa otra vez In regia del tnangulo. En el esquema mostrado, Ia lfnea 1-1' es In direceidn conoclda de T1. Las lIneas 2-2' mdican varias direcciones posibles de Tz. Observe que el mfnimo valor de T2 ocnrre euando T I yT2 soli perpendieulares, EI valor minima de T z es Tz
= (5 000 1b) sen 30" = 2 500 Ib
de T1 Y (l' son
tolo reetan-
Los valores correspondientes TI
0'
(5 000 Ib) cos 30"
=4
330 lb
0: =
= 90° - 30°
60'"
5()(jOI1:i
ESOLUCI6N
_.
~N
lIi.:::.
DE PROBLEMAS FOR M A I N 0 E PEN 0 lEN T E
---------------------------------
Las secciones
anteriores
estuvieron
dedicadas
a la
ley del paralelogramo para la adi-
ci6n de vectores. Ahara se pedira la resolucion de problemas en forma Independienre. Mientras que algunos problemas seran similares a los problemas resueltos otros no 10 seran, La que tienen en connin todos los problemas resueltos y los problemas ~ropuestos correspondientes a esta seccion es que se pueden resolver can la aplicaci6n directa de la ley del paral,elogramo. La solucion de un problema propuesto debe basar e en los siguientes pasos: 1. Identifiea,. cutiles de las Juerzas son las aplicadas y cudl es la resultante. ocasiones es util escribir la ecuacion vectorial que muestra la fonna en que las fuerzas estan relacionadas entre sf. Por ejemplo, en el problema resuelto 2.1 se tendria
En muchas
B=F+Q
Es deseable tener presente esta relacional de la solucion,
mornento de formular
la sigillente parte
2. Dibt",jar un paralelogramo can las juerzas aplicadas como dos lado« adyacent'e8 y la resultante como la diagonal que parle del origen de 108 d08 vectores (figura 2.2). Se puede usar la regla del triti:ngulo, alternativamente, can las fuerzas aphcadas dibujadas con la union de la parte terminal de uno de los vectores a la parte inicial del otro y dibujando la fnerza zesultante extendiendose desde la parte inicial del primer vector hasta la parte terminal del segundo vector (fi:gUTa .7). 2 3. SeiialuT toda« las dimen.'fione8. Con el usn de uno de los triangulos del paralelogramo, 0 el triangulo construido de acuerdo can la regla del triangilla, se deben sefialar todas las dimensiones -ya sean lados 0 angulos- y determinar las dimensiones desconociclas ya sea en forma gnifica 0 por trigonometrfa. Si se usa trigonometria, debe reeordarse que la ley de los cosenos se debe aplicar primero si dos lados y el angnlo gue estes forman son conoeidos [problema resuelto 2.1], y la ley de los senos debe aplicarse primero si uno de los lados y todas los angulos son conocidos [problema resuelto 2.2]' Como es claro en las .fignras de 1.'1 secci6n 2.6, las dos componentes de una fuerza deben ser perpendiculares, Per tanto, cuando se requiem descomponer una fuerza en dos oomponentes, es esencial alinear los dos lades adyacentes del paraleJogramo con las lmeas de acci6n especificadas de Lascomponentes.
cas de solucion de esta lecci6n en favor de deseomponer
Si se tiene un estudio previo de mecanica, se podna estar tentado a ignorar las tecnilas fuerzas en sus oomponentes rectangulares. A pesar de que este ultimo metoda es impertante y sera considerado en la siguiente secci6n, el usa de la ley del paralelogramo simplifica la solucion de rnuehos problemas y debe dominarse en estes mementos.
24
2. 1 Dos fuerzas sa aplican a una annella sujeta a una viga. Determine ~~._..,,"'"lte1a magnitad y La direcci6n de su resultante usando a) la ley del pa...-ti"'~t":lmo y b) la regla del triangulo. 2.2 Los mantes de cable AB y AD sostienen al peste AC. Se saba que la es de 500 N en AB y 160 N en AD, ahora determine gnfficamente --=,u"-' ud y la di.recci6n de.la resultante de las fuerzas ejercidas par los tiranA usanao a) la ley del paralelogramo y b) In regia del triangulo.
Figura P2.1
£gum. Sabiendo que P = 15 lb Y Q = 25 lb, determine gr6.fiea.mente ~d y la direccion de su resnltante con el usa de (J) la ley del paraleloy b) la regla del triangulo.
2-4 Dos fneraas F y Q se aplican en el plmto A del gandlO que se mnesh. figura. Si P = 45 lb y Q = IS lb, determtnense gr.illcan'H~nteIa mag, Ia direecion de su resultants empleando (t) Ia ley del paralelogramo y regia del triangulo.
Dos Iuerzas P y Q se aplican ell el puuto A del gaucho que se mues-
--~-
In
---1--1.5
J
2,5m
ill
____j
Figura P2.2
Figuras P2..3 Y P2.4
Dos vanllas de control estan unidas en A a la palanea AB. Can el uso mgonomema y sabiendo que Ia fuersa en la varllla de la izquierda eli = 120 N, determine a) Ia fuerza Fs requerida en Lavarilla der cha si la res=::t:mJIE R de las fuerzas ejeroidas por las varillas sobre Ia palanea es vertical magrutud eorrespondiente de R.
2..5
2.6 Dos varillas de control esran unidas en A a Ia palanca AB. Con la trietrla y sahiendo Clue 1a fuerza en la varilla de la dereeha es F2 == SO N '-==..LW- uie a) la fuerza F\ requertda en la varilla izquierda si la resultante R de ;:uazas ejercidas por las varillas sabre la palanca es vertical y b) la magnirud -rrespondiente de R
Figura P2.5 y P2.S
51!"
respnestas para todos los problemas cuyo mimcro E'sta ell UTl lipo de Ietra recta (como propomionan al flnal del Ilbro. Las respuestas para los problemas cuyo rnimcrn esM en cursiva (como 2.2) no se proporcionan).
25
2.7 La fuerza de 50 Ib se deseompone en oomponentes a It>largo de las lfneas a-a' Y b-b' ..(}) Determine por trigoDometria. el a:ngclo a sj_ la componente a 10 largo de a-a'es de 35 Ib, Y b) dL"UiiI es el valor correspondtentede la componente a le largode h-b'? 2.8 La fuerza de 50 lb se descompone en compouentes ala largo de las linens /1-11' y b-b', a) Determine por trigonornetrfa el angulo a si la componente a 10 largo de b-b' es de 30 Ib, Y b) dCru1l es 1".1 valor correspondiente de la cornponente a 10 largo de a-a'? . 2.9 Dos cables se conectan a un anuncio en ,,1 para mientras es bajado a Sl1 posici6n. Si ex = 25°, determine (/) III magnitud requerida de Ia fuerza P si III resultante R de cad.asen A es vertical y b) la magnitud eorrespondiente de
11
b
SlIlh
rnantenerlo estahle por tngonometna; las dos fuerzas ilpliR.
~stahle
2.10
Dus cables se euuectau
a uu anunclu CII A para mantenerlo
F:lgur.a P2.7 Y P2.B
rnientras es hajado a su posicion, Si Ia magnitud de P es 300 N, dctermmese por trigonometrla: a) el ingWo a re.querido s.i la resultante R de las dos fueTZWi aphcadas en A es vertical y b) 1a IlliIgnitud correspondiente de R.
FiguraP2.9
y P2.10
2.11.. Des [uerzas son aplicadas en el gancho que se muestra en Ia figura. Si Ia magnitud'de_P es 14 lb, determine par bigollometria: a) el i1ngulo a requelido si la rssultante R de las dos fuerzas apllcadas en el gaucho es horizontal y b) la magnitudoorrespondiente df' n. 2.12 Para el gancho del problema '2.3, si la lnagnitucl de Pes 25 Ib, determine por trigonometrla: a) ill magmtud requerida de la lUerw. Q sJ: la resultants R de las dos fnerzas apllcadas en A es vertical y b).Ia magrutud correspondlente deR.
Figura
P2.11
2.13 Para el gaucho del problema 2.11, determfnese.portrigonornetrfaa) la magnitud y Ia direccion de la fuerza P m{1S peguelia. para la cual la resultante R de las dos fuerzas aplicadas en el g<lli.cbo es horizontal y b) Ia magnitud correspondlente de R. 2.14 Cornose muestra en Ia £iguril P2.9, des cables se conectan a un annncio en A para mantenerlo.estable mieutras este es bnjado 11 su posicion, Determine par trigonomem.a: a) la magllitud y Ia direcci6n de Ia fuerza P mas pe~uefia, para la cual Ia resultante R de las dos fuerzas apllcadas en A ·es vertical y b) 1<1 magnitud oorrespondiente de R. 2.15 Pam el gancho del problema 2.11, determine por trigoncmetrfa la magnitm] y la direcci6n de Ia resultants de las dos ru.erz<lS aphcadas en el ganelm, conoeiendo que P = 1O!b Y a = 40°. 2.16
Besuelva el problema 2.1 em pl ean do trigonomEltrfa,
o de las lponente de la
2.17 2.18
Resuelva el pl"Oblema 2.2 empleando b"igonometrla. Resuelva el problema 2.3 empleando trigonometrla.
2.7. Componentes rectangularas
de una fuamt"
lJIIiI:m"Io$
Vectoms
27
:0 de las nponenIre deja
2.19 Los elementos estrueturales A y B estan 'rernaehados al apoyo mosttado en Ia figura.. Si se sabe que ambos elementos estan en compresion yquela fUet:za en el clemente A es de 30 kN Yen el elemento B es de 20 kN, determine poT trigonometrfa Ia magmtud y 1a direccion de 13 resultante de las fuerzas aplicadas al apoyo par los elementos A y B. 2.20 Los elementos estructurales A y B esran rernachados al apoyo mostrndo en la figura. Si se sabe que ambos elementos estan en compresi6n y que In fueIza en el elemento A es de 20 kN y en ei elemenro B es de 30 kN, determipor trigonometria la magnitud y la direcci6nde ~das al apoyo pOr los elementos A y B. 1a resultante de las fuerzas
Figura P2.19 Y P2.Z0
) estable
ometrfa:
rzas aplio estable :':Tlllfnese
is
ruerz3s
. COMPONENTES RECTANGULARES CTORES UN.TAR.OSt
';;:.0
DE UNA FUERZA.
muchos problem as es conveniente separar una fuerza en sus dos COUlneutes perpendiculares entre sf. En la figma 2.18, 1a fuerza F se ha compuesto en una componente F x a 10 largo del eje x y una compote Fy a 10 largo del eje y. El p.aralelogramo trazado para obtener las componentes es un rectti.ng1.tlo, y las Iuerzas F, y Fy se llaman corn-
enies rectangulares.
11a Bgura.
00'
orizontal
requey
i lb, deterresultante spondiente
Figura 2.18 onometrfa: tal hi res ulFigura 2.l9
a magnitud
Los ejes X y Y suelen escogerse a 10 largo de las direcciones horizony vertical, respectivamente, como se mnestra en la flgura 2.18; sin """':h<>'"doO, pueden escogerse en cualesquiera otras dos direceiones periculares como se muestra en la figura 2.19. Para determinarIas comntes rectangulares de una fuerza, se debe pensar que las Itneas de cei6n mostradas en las figuras 2.18 y 2.19 SOn paralelas a los ejes y en Ingar de perpendiculares a ellos, Esta practiea ayudara a evitar ...- ....... en la determinacion de componentes oblicua« como en Ia sec'" 2..6.
ectan a un
l P mas pees vertical y
ISici6ri. De-
nometrfa la sen eI ganpropiedades establecidas en las seccioncs 2.7 Y 2.8 se pueden extender con facilidnd a
~ellfes
rectanguktes de oualquier otra.cautidail
vectorial.
'I
En este punta se introdueiran dos vectores de magnitud unitaria dirigidos a 10 largo de los ejes positives x y y. A estos vectores se les llama eectores unita:ri.os y S8 representan por iy j, respectfvamente (figura 2.20). AI recordar Ia delloici6n del producto de UTI escalar y un vector dada en Ia seccion 2.4, se observa que las componentes reotangulares F~ y Fy de una fuerza F pueden obtenerse Don 1a multiplicacieu de sus respectivos vectores unitarios i y j par escalares apropiados (ugum 2,21 . Se escribe
_J t!Magnitud =1
I
'J
r !
F~.= Fxi y
(2.6
Figura 2.20
(2.7
Mientras que los escalar s E; y Fy pueden ser positivos 0 negativos, dependie~do del sentido de. FrY F V' sus valores absolutos son respectivamente 19u"ues a las magrntudes de las cornponentes de las fuerzas F .. y Fy. Los escalares F" y F" se Ilaman componentes escalares de la fuerza F, mientras que las componentes reales de lafuerza Fx y Fy son las componenie« oectoriaies de F. Sin em bnrgo , cuando no existe alguna posibilidad de confnsion, a los vectores y a las companentes escalares de F puede llamarseles simplemente coniponentes de F. Se observa que Ia componente escalar F)., es positiva euando la components vectorial Fs tiene el mismo sentido que el vector unitario i (es deeir, el tnisrno selltido gue el eje x positive) yes negativa cuando F .. tiene el sentido opuesto. Una conclusion sernejante puede obtenerse observando el signa de
F' ,I =1':t: i
.t
Figura 2.21
Ia componenre 10 entre FyI
presar
escalar _pv:
con F Ia magnitud de la fuerza F
Si se represents
eje r, medido en sentido contrario al mavimiento de las manecillas del reloj desde el eje x positivo (Bgura 2.21), se pueden exlas componentes escalares de F como sigue:
y con
(J
el
angu-
(2.8)
Se observa que las relaciones obtenidas se satisfacen para cualquier valor del angulo (J entre 0° y 360°, Y queestas clefinen tanto los sign os C()rno los valores absolutos de las compouentes esealares Fx y Frl'
Il)
EJemplo 1. Una fuerza de BOO N se ejerce sohre un perno A como se muestra en la figura 2,22{1.Determfnese las componentes honzontal y vertical
de la fuerza,
0 -
----_-----
YI
Para obtener el signa correcto de las cornponentes esealares F;r y F!J' el valor 180 3.5° = ]45" de-be sustiuirse par 8 en las ecuaciones (2.8). Sin embargo, es mas practico determiner por inspecelon los signos de F, y Py (figura 2.22b) Yusar las Iunciones trigonometricas del angolo a = 35°. Por consigutente se puede eseribir
r,
F,.=-F cos a = -(800 N) cos 35P = -655 N = +F sen ex = +(800 ) sen 35° = +459 N
b)
Flgura 2.22
Las componsntes vectoriales de F son entonces F, = -(655 N)i YF se puede escrihir en la forma F F!I = +(459 Nlj
-(655 N)i
+ (459 N)j
aria
les Ua(figura
vector lares For sus resa 2.21).
I
ru-
Ejemplo 2_ Un hombre, jala una cuerda atada a un edifieio con una fuerde 3{)() .xoroo se muestra en la figura 2.23a. dCuHles son las componentes . ntal y vertical de Ia fuerza ejeroida por la cuerda en el punto A? A partir de Ia figura 2.23b se ve que F:.
2.7. Componentes
rectanglJlares da una fuerza, Vectorss uni1arios
29
+(300 N) cos
0:
Fy
= -(300 N) sen
0:
ODseJvando que AB
8m cos 0: == _-AB
10 m, "' partir de la agora 2.23a se encuentra que
"" -
(2.6)
=: -- --
8 ill 10m
4 5
sen a
= --
6 m6m
AB
= ----
LOm
=-
eel> se ohtiene
(2.7) vos, depectiva-
F~= +(300 N)%= +240 N escrihe F
Fy
-(300 N)%= -180 N
0)
zas F~Y
(240 N)i - (180 N)j
, fuerza as comna posies de F I que Ia erial F~
mo sen-
i una fuerza F se define par sus componentes rectangnlares F, y vease Hgura 2.21), I'll angulo {}que deflne su direcci6n puede obte-
---
e escribiendo
(2.9)
b) ~ magnitud -endo F de la fuerza
5e
, opues:igno de
obtiene
can
I'll teorema de Pitagoras y es(2.10)
Figura 2.23
~l anguo de las
iden exresolviendo para F una de las f6nnulas de la ecuacion
(2.8)
(2.8)
[iller va~os co-
Eiemplo 3. Una fuerza F = (700 Ib)i + (1500 Ib)j S8 apllca a Ill) perno A. -tBnlinese Ia magn.itud de la fuerza y el Mguill (}qne fonna con la horizontal. Primero se dibuja un diagFama que- muestra las dos componentes rectande Ia fuerza y el.lingulo (figura 2.24). A partir de la ecuacion (2.9), 58
.,..j,e
'l_ _
::e
.......
como se vertical F,I' el vaSin em~y(figura nsiguien-
tan
e --
Fy _ 1500 lb F - 700 lh
x
8 II:>
Con hi caleuladora, I se hace la division de 1500 lb entre 700 Ib: se calcula tangente de .este cociente y se obtiene () = 65.0°. AI resolver la seguulas eouaciones (2.8) para F, se tiene
t=
-
__!!L_ = 1 500 lb
sen (} sen 6$.0°
1 655 Ib
Figura 2.24
Ultimo calculo se facilita si.el valor de Fy se alrnacena en la memoria desde se introduce, de manera que pueda sez llamado para drvidirse entre sell 8:
---:-1t--'-""" ....
SlIpOne qUfJ la calculadora que se estd unllzando tiene rcclas pam e1 calculc de funcioometrioas y de funcronestngonornotucas tnversas, Algunas calculadoras tambien tieII!d.as: para coavertir directamente de coordenadas reetangulares a coordenadas poiares y Este tipo de calculadoras elrminau la necesidad de calcular funoioues ttigonolIletri- ejemplos 1, 2 Y 3 Y en problemas del rrdsmo tipo.
2.8. ADICION DE FUERZAS SUMANDO
SUS COMPONENTES
En Ia secci6n 2.2 se estuJi6 que las fuerzas deben sumarse de ·::I".'-'Pl"'T, con la ley del paralelogramo, A partir de esta ley se derivaron en las ciones 2.4 y 2.5 otros dos metodos mas directos aplicables a la solll.C:
gnifica de Losproblemas: Ia regla del b:iAogulopara.Ia suma de dos zas y In regla del polfgono para la aclici6n de tres a mas fuerzas, bien se via que el tnangulo de fuerzas usado para definir la ""'"LU""""'.::c
de dos fuerzas podna usarse para obtener una solneion trigonomitri Cuando se van a sumar tres 0 mas fuerzas, no puede obtenerse soluci6n b:igonomebicapractica delpolfgono de Iuerzas que define ala fu:: za resultante, En este caso puede obtenerse una solucion ana1itica problema si se descompone cada fuerza en sus elementos reotangular-, Cousidere, por ejemplo, las tres fuerzas P. Q Y S que actiian sobre particulaA (figura 2.250;). Su resultante R esta definida por la rela
0)
R=P+Q+S
Si se descompone cada fuerza en sus componentes rectangulares. se cribe R:,.i
+ Ryj = P,j + PJ + Qri + QJ + 5,;i + SJ = (P" + Qcx + S,)i + (Py + Qy + Sy)j
de donde se tiene que
R"
0,
P" + Q.t + S.~
en forma breve.
Por tanto, se puede concluir que las componentes esealares Rx y ~ la resultants R de oarias [uerzas que actltan sobre una partfcula se
c)
A el)
Figura 2.25
2.2Sb). Con Ia suma de estas componentes se ebtienen las tes x y Ij de R (figura 2.25c). Finalmente, la resultante R = R.• + i se determina aplicando Ia ley del paralelogramo (figura 2.25d). EJ cedimiento que se acaba de describir se realiza can mas eficiencia si calculos se tabulan. Aunque este es eltinico metoda analftieo nr.,Ph: ... para Ia adioidn de tres 0 mas fuerzas, con frecuencia tambien 58 Ie flere sabre Ia soluci6n tngonometnca en el caso de la suma de dos
i"nf1"l-n,m... .....
tienen separanda de manera algebraica las correspondienies compo tes escalares de las [uerzas dadas. I En la practica, Ladeterminacion de la resultants R se realiza en etapas, como se ilustra en IIIfigura 2.25. Primero, las fuerzas en la figura 2.250 se descomponen en sus componentes x Y !I
I.UV'';><~._
I Obviamente, este resultado se puedc apllcar tambleaa ta adlcion de arras cantidades toriales como velocidades, aeeleraclones 0 cantidades de rnovirnieuto.
PROBLEMA RESUELTO 2.3
e acuerdo :ill las seca solucion ~dos Iuerzas. Tamresultante wmitrica. merse una I.e a ill. fuerLJ1ftica del
=1l0N Fr= 150
Cuatro fuerzas actilan s.Qbre on perno A como sa muestra en la figura. Determine la resultante de las fuerzas sabre el perno.
:angulares.
sobre una Ia relad6n (2.11) ares, se es-
Las componentes x y y de eada fuerza se determinan por trigonomdda.. como se muestra en la .B.guray se escriben eo. la tabla. De aeuerdo con la convenctou adoptada en la seoeidn 2.7. un numero esealar qu representa la componente de una fuerza es positivo si la components tiene el mismo sentido que el correspondiente eje de coordenadas, Entonces, las componentes x que acuian a la dereeha y las eomponentes que actiian haela arriba se represeu tan por ruimc1'OS positives.
Fuerza
Magnitud,
Cornponente
x, N
Componente
Y. N
F.l Fz F:3" F..j
150 80 110
100
+129.9 -27.4 0 +96.6
-1-75.0 +75.2 -110.0 -25.9
(2.12)
R.:
+ 199.1
By
ee
+14.3
(2.13)
En estas condiciones 1a resultante R de las euatro fuerzas es
.R"yRyde
icuJa se obcomponen-
R:::::
R.:i + RJ
R = (199.1 N)i
+ (14.3 N)j
aliza en tres
is
La magmtud y direccion de La resultante ya puede deterrntnarse. D~'1triangmo mostrado en la ugunl, se tiene
mostradas
yy
(figura
componen-
tan
= Ry.=
=R.1+RJ
::iencia si
R.
199.1 N
14.3 N
a=
4.l'"
5d). El pro-
10
nco practi ~n se Ie prel
R=
14.3 N sen a
199.6 N
199.6 N .f.~U"
dos fuerzas
EI ultimo calculo puede facilitarse con el uso de calc Iiladora, si el valor de Ryse almacena en la memoria at intreducirse; de manera que pueda ser llamado para divimrse entre sen a. (Vease tambien In nota al pie de llagiliU rulmero 4 de este capitulo).
cantidades
vet
31
Como se vio en la leceion anterior; La resultante de dos fuerzas puede ser determinada grMicamente 0 a partir de un tri<inguJo nblleuo, con el usn de la trlgollometrfa.
A.
Cuando estatl i'IWol'UCf"aclasres 0 mall juerzas. la determiuaci6n de su resultants R se t lleva a cabo de manera mas sencilia descomponiendo primero eada una de las fnerzas en sus componentes rectangulm-es. Se pueden eneontrar dos casos, que dependen de Ia forma ea que este defiuida cada una de las Iuerzas dudas:
Caso 1. La Juerza F esui definida pOT medio de 81.1' mugnttud F y el dngulo a que forma con el eje tle las x. Las componentes x Y 11de la fuerza se pueden obtenez; respectivamente, al multiplicar F pOl' cos 0: y par sell !l' [ejemplo 1].
Ctl90 2. La _flterw F se define por media de till magnittld F y laB CQordenadll,s de do« puntosA y B que se encuentran a 1.0largo de ffU linea de acCWtl (£gru·a2.23), Por media de la trigonom 'tria, primero sa puede deterrninar el lingulo a que F forma 00]] el eje x. Sin embargo. las componentes de F tamlnen se pueden obtener directarnente a partir de las proporclones entre las divers as dirnensiones involucradas, sin determinar realmente a [ejempIa 2].
B. Componentelj rectangillares de In rewltan'te. Las componentes H, y By de la resultante se pueden ohtener con la suma algebmica de las componentes correspondientes de las fuerzas dadas (problema resuelto 2,3).
estrin dirigidos, respectivamente, a 10 largo de los ejes x y '}: R=R"i+RJ
La resultante se puede expresar enfurm.tl oeotottal con los vectores unitarios i y j, los cnales
De mauera altemativa, se pueden determlnar la rII{lgnitutl y [a direcci6n de la resultante TB501viendo palll R y pam el Angulo que R forma con el eje x, e1 triangulo reetangulo de lades R,;
yR~.
En los ejemplos y en el problema resuelto de esta lecci6n, los ejes x )' y fueron, respectivamente, horizontal y vertical. Sin embargo, se debe recordar que, pant algunos problemas. sera mils eficiente rotar los ejes para aliuearlos COIl una o J1'Ias Je las fuert.as aplicadas,
32
30kN
Determine las componentes x y y de cada una de las fuerzas mas-
2.22
Determine las cornpanentes x Y Ij de cada una de las fuerzas mos-
Figura P2.21
48in!
-io ill
\
56in
Figura P2.22
/11
j
90 in
Determine las oemponentes x y ycle cada unu de Ins fuer-
Figura P2.2S
200
o
Dtmensiones
.enmm
x
~Hll\
\
\
_j
\-
225
1--120~ Figura P2.24
1:!':;z:!:::l::t;;li
.Mitrn:I:rns vacfa una earretilla, un jardinero ejerce sabre cada mango F dirigida a 10 largo de la lfnea CD, Si P tiene una componente de, 135 N. determine: a) la magnitudde la fuerza P y b) su compoAgora P2,25
33
34
EstJttica de partk:uIas
2.26 EI elemento BD ejerce sobre el miembro ABC una fuerza P da a 10 largo de la.Itnea BD, Si P tiene una componente vertical de 960 N tennille; a) Ia magnitnd de Ia fuaria P y b) su componente horizontal, 2.27 El elemento CB de la pIellSl;lde banc-o mash-ada en la Bgura ce sobre el bloque B una fuerza P dirigida a 10 largo de la linea CB. 51 se que la compouente horizontal de P tiene una magnitud de 260 lb, dete a) la magnitud de la Iuerza P y b) su componente vertical.
A Figura P2.26
Figura P2..27 Figura P2.28
8'
2.28 La varilla de actrvador AB ejerce sobre el codn BCD una fuerza E' tigida a 10 largo de la lfnea An, Si se sabe que P debe toner una eompenente pendfcular al braze BC de la manivela, oon una magnltud de 25 lb, del:errlC:l~: a) la magnitud de la fuerza P, y b) su components a 10 largo de la linea BC. 2.29 El alambre BD ejerce sabre el poste telefonico AG una fuerza P rigid a a 10largo de BD. Si P tiene una componente de 450 N a 10 largo de _ nea AG, determine; a) la magnttud de Ia fuerza P, y b) Sll componente en dixecci6n perpendicular a AG.
2.30 El alsrnbre ED ejerce sabre el paste telefonico AC una fuersa P rigida a 10 largo de BD. Sl se sabe que P tiene una camponente de 200 N pendicular at paste AG, determine: a) la magnitud de la fuerza P, y b oomponente a 10 largo de la linea AC.
Figura P2.29 Y P2.30
2.31
Determine Ia resultante de las tres fuer:zas del problema 2.24,
2.32 Determine In resultante de las tres .fuerzas del problema 2.21. 2.33
2.34 Determine Ia resultants de las tres fnerzas del problema 2.22. Determine la resultante de las tres fuerzas del problema 2.23.
2.35 Si se saba que a mostradas,
Figura P2.35 Y P2.36
35°, determine Ia resultante de lastres
2.36
mostradas,
Si se sabe que a
= 65°, determine la resultante de las tres
rza P dirigi: !:l6O. N, deItru. . figura ejerB. Si se sabe
, determine:
BOlO.
r
loolb
2.9. EquHlbrio de una par1fc:uIa
35
Figura P2.37
GO Ib 140")
2.37 8i la tension en el cable BC es de 145 Ib, determine la resultante de fuerzas ejercidas en el punto B de la viga .4B. 2.38 Si ex
= 50°, determine la resultante de las tres fuerzas mostradas,
2.39
Determine: a) el valor de a requerido si la .resultante de las tres fuer.se muestran es vertical y h) Ia magnltud correspondiente de la resultante,
Figura P2.38 Y P2.39
40
Para la viga del problema 2.37, determine; 0) Latensi6n requerida en BC si la resultants de las tres fuerzas ejercidas en el punta B es vertical magnitud correspondtente de la resultante,
rna fuerza.P illmponente per, lb, determine: a JineaBC. rna fuerza P rulo largo de la 11ponente en una
1 Elaguil6nA.B e~fa sostenido en la posici6n mostrada par tres cables. rensiones en los cab\es AC y AD son, respectivamente, de 4 kN y $..2kN, .::e::;:~IiI· ie: a) la tensi6n en el cable AE si Ia .resnltante de las' tensiones ejerctdas =to A del agliil6n debe estar dirigida a 10 largo de AB y b) la rnagnitud "!l!:~:lfmdiente de ill resultants. 42 Para el bloque de los prqbIemas 2.35 y 2.36, determine: a) e] valor ~::.!::ldo de ex si 13 resultantede las tres fuerzas mostradas es paralela al plano =.;.;....;.;..:a.; ... y b) la magmtud correspondiente de la resultants.
Figura P2.41
una fuerza P die de 200 N pererz.a P, y b) so
LaBRIO DE UNA PARTfcULA seeciones anteriores se expll{iieroll los metodos para determinar ~bmte de varias fuerzas que actiian sobre una partieula. Aunque oenrrido en ninguno de los problemas examlnados hasta ahara, es que 1a resultante sea cero, En estos casas, el efecto neto de las dadas es cera y se dice que 1a particula esta en equilibria. Ense tiene la siguiente definicion: sf la resuJtante de todas las [ueractUan sobre una partfcula es cera, I« particula se encuentra en partfcula sujeta a Ia accion de dos fuerzas estani en equilibria tienen la misma magrutud, la misma linea de acoion y sentidos J&.I,O.l~"""" Entonces la resultante de las des fuerzas es oero, En lafigu- se muestra este casa.
d.ema 2.24. ,lema 2.21. llema2.22.
Ie las tres fueTza:
Ie las tres fuerzas
36
Otra caso de una particula en equilibria se muestra en la figura ~donde aparecen cuatro fnerzas que acnian sobre A En la Bgura 2.9 resultante de las fuerzas dadas se detennina por la regIa del poll Empezando en el punto 0 con FlY acomodando las fuerzas punta a la, se encuentra que La punta de F4. coincide con e1punta de partida 0 que la resultante R del sistema de fuerzas dado es cera y la particula en equilibria. El pollgono cerrado de la figura 2.28 proporciona una expresi6n fica del equilibria de A. Para expresar en forma algebmica las cOIldicm~ del equilibria de una partfcula se escribe
FIgura 2.27
F1=::lOOlb
Descomponiendo hene 2:(F)
eada fuerza F
en
sus eomponentes rectangulares
+ Fyj)
Se cancluye que las condiciones necesarias brio de una particula sao
y suficientes para el
FIgura 2.28
Regresando a Ia partfcula mostrada en la figura 2.27, se compmeba las condiciones de equilibria S8 satisfacen. Se escribe
= 300 lb - (200 lb) sen 30° - (400 lb) sen 30° = 300 Ib - 100 Ib - 200 lb = a 2:Fy = -173.2 lb - (200 Ib) cos 30° + (400 Ib) cos 30° = -173.2lb - 173.2 lb + 346.41b = a
'SF"
2.10. PRIMERA LEY DEL MOVIMIENTO DE NEWTON A finales del siglo XVII Sir Isaac Newton formulo tres Jeres rmlillllInE~ Ies en las que S8 basa la ciencia de La mecaniea, La primera de es yes puede enunciarse como slgue.
Si
La [uerza resultante que acuia sobr« una partteula es cero, in '
tloul(J permanecerti en repose (s'/ orlgina.lmente estaba en repose} mooerd con oelocidad constante en lfnea recta (si originalmente en mooimiento) . De esta ley y de la definicion de equilibrio expuestaen la 2.9, se deduce que una partfcula en equilibria puede estar en moviendos en linea recta can velocidad constante. En la siguieote cion se consideraran varies problemasconcernientes al equilibrio de panfoula, 2.11. PROBLEMAS RELACIONAOOS CON EL EaUILIBRIO DE UNA PARTiCULA. DIAGRAMAS DE CUERPO LlBRE En la practica, un problema de ingenieria meeanica se deriva de Ul; tnaeien ffsica real. Un esquema que muestra las condiciones ffsicas problema se eonoce como diagrama especial. Los. metodos de analisis estudiados en las seceiones anterio apliean a un sistema de fuerzas que acnian sabre una particula. Un mimero de problemas que tratan de estructuras pueden reduclrse a blemas concernientes at equilibria de una partfcula, Esta se hace
figura2.27, rura , 2.28, la el poligono. punta a coartida 0, asl arncula esta presion grdcondiciones (2.14) ngulares, se
~'_"'r-2
rra el equili(2.15) aprueba que.
una particula signif'icativa y dibujando un diagram a separado que ~ a esta y a todas las fuerzas que actiian sobre ella. Dieho diagrae conoce como diagral1w de cuerpohbre, Par ejemplo, considere e el embalaje de madera de 75 kg mostrael di.agrama espacial de la nguJ"a 2.29,~.Este descansaba entre dos ios y ahara as Ievantado hacia Ia plataforma de un carnian que 10 de ahf. EI ernbalaje esta soportado por un cable vertical unido dos cuerdas que pasan sobre poleas njas a los ediflcios en Bye. deterrnmar la tension en cada una de las cuerdas AB y AC. ara resolve]' el problema debe trazarse un diagrama de cue'1)O line muestre ala parncula en equilibrio. Puesto que se analizan las ~--'-'-es en las cuerdas, el diagram a 'de cumpo Iibre debe incluir al mema de estas tensiones y si es posible a ambas. El punto A parece buen cuerpo libre para este problema, El diagrama de cuerpo liI punta A se mnestra en la figura 2.29b. Esta muestra al punto A fuerzas ejercidas sobre A par el cable vertical y las dos cuerdas, La ejercida por el cable esta dirigida bacia abajo y es igual al peso W tenedor. -De acuerdo can la ecuacion (1.4), se escribe
L
2.11_Problemas rslaclonados con el equdibno
de una partiCUIa. Diagramas de cuerpo hbre
37
a) Diagralfla espacial
mg = (75 kg)(9.81 mls2)
736 N
Iundamentaa de estas lei
~ca este valor en el cllagrama de cuerpo libre, Las fuerzas ejerpor las dos cuerdas no se conocen, pero CQIDO son iguales en maga. la tension en la cuerda AB y en la cnerda AG, se representan MI y TAC Y se dibujan hacia fuera de A en las direcciones mostraeJ diagrama espaclal. No se incluyen, otros detalles en el diagracueIpo libre, to que el P'llDto A esta en equilibrio, las tresfuerzas que acttian el deben format tID trHingulo cerrado euando se dibujan de punta Estet1""icf.ngulo de [uerzae ha sido dihujada en la Bgura 2.29c. Los -e"i TAB Y l'AC d las tensiones en las cuerdas pueden encontrarse ~ .anente si el biangulo se dibuja a esc-ala,0 pueden encontrarse metngonometrta, Si se 85coge el Ultimo metoda de solucion, can de los senos se escribe
r
b) Oiagrama do cuelpn ltbre Figura 2.29
1'\ Triangulo de fuerzas
TAB
cero, la parreposo)
0
T.... e
sen 60° TAB =647 N
736 N sen 80°
mente estak
nando una partfcula esta en equilibrio bajo ires foer:::as. e1preblere puede resolverse dtbujando un ffiangulo de Iuerzas. Cuannartfcula esU en equilibrio bajo nuis de ires juerza.s, e1 problema resolverse gnlficamente dlbujando un poligono de fnerzas, Si sa ...na soluci6n analitica, se deben resolver las ecuaciones de e.quilien la seocion 2.9: aRlO IE
LF. = 0
LFlJ =0
(2.15)
eenaeiones pueden resolverse para no mas de dos inc6gnUns; en ____ ._~...ejante, el triangulo de fuerzas usado en el caso de equilibrio fuerzas puede resolverse para dos incognitas. tipos mas comunes de problemas son aquellos donde las dos in'representan 1) las doscomponentes (0 la magnitud y direc- una sola fnerza, 2) las magnitudes de las dos fuerzas, oada una :ciD-nconoctda, Tamhien se eneuentran problemas que requiemmrinac.i6n del valor maximo 0 minima de la rnagnttud de una ease problemas del 2.59 al2.64).
Fotogratfa .2.1 Como sa i1usfr6 an al ejemplo anterior, es posible determinar las tensiones en los cables que sostienen al eje que se muestra en ta fotografia, conaiderandc ill gancho como una partlcula y despuas aplloando las eouaciones de equilibria a las fuerzas que actiran sobre al gancho.
PROBLEMA RESUELTO 2.4
En la operacion de descarga de un barco, un autom6vil de 3 500 Ib es soportado por on cable. Se ata una cuerda al cable en A y se tira para centrar al auromovil sobre la posiei6n deseada, El angulo entre e1cable y la vertical as de 2°, mientras que el-angu]o entre Ia euerda y 1.1. horizontal es de 30°. dClI!l es Ia tensi6 en la euerda?
SOLUC'ON
Diagrama de cuerpo libre. Se escoge el punta A como cnerpo Iibre y dihuja el diagrama completo de cuerpo libre. TAB es la tension en 61 cable AB y TAG es Ia teIlSi6n en Ia cuerda,
S6
Conruci6n de equilibrio. Como s610 actiian tres fuerzas sobre el CUeTpo libre, se dibuja un trifulgulo de fuerzas para expresar que este S6 encueatra en equilibria. COn la ley de los senos se escrihe T..uJ TAC =-~.= sen 120" sen 2°
3 500 lb
sen 58"
Utilizando una calculadora, primero se calcula yse guarda el valor del Ultimo cociente. Se multiplica este valor en forma sucesiva par sen 120" y seI12°. se obtiene
TAB
= 3570
Ib
TAG
= IMlb
PROBLEMA RESUELTO 2~5
Determine la magnitud. direeeion y sentido de la .fuerza F _maspequeful que mantendra en equilibria al paquete que se muestraal margen, Notese que Ia fuerza ejercida por los rodil1os sabre el paquete es perpendicular al, plano incli-
uado.
w=(:lnkg){I1.BI ",2H4 N
SOLUCI6N
mls:'.1
Diagrama de cuerpo Iibre. Se escoge el paquete como cuerpo libre, suponiendo que este Sf! puede tratar como particula. Se dibuja e1 diagrama de cuerpo Iibre correspondiente, Condicion de equilibrio. Puesto que s610 acnian tres fuerzas sabre cuerpo lihre, se clibuja un mangulo de fuerzas para expresar que esta en equilibria. La If.nea1-1' representa la clirecd6n conoorda de P. Para obtener el valor mfnimo de la Iuerza F se esooge 101 direcoion de F perpendicular a la de P De la geometria del trumgula obtenido, S6 encuentra que F = (294 N) sen 15°
'1' I
= 76.1 N"
(t"
= 15" F = 76.1 N 5..150
38
PROBLEMA RESUELTO 2.6
xirtado
utomo-
,mientension
Como parte del' diseno de LID nuevo velero, se desea determinar la fuerza de arrastre que puede esperarse ,I cierta voloeidad, Para hacerlo, se colcea un modelo del easce propuesto en un canal de prueba y se usan tres cables para mantener su proa en e1 eje del ceutro del canal. Las Iecturas de los dinamometros indican que para una velocidad dada Ia tension es de 40 Ib en el cable AB )' de 601b en el cable AE. Determine la fnerza de arrastre ejercida sobr el casco y Ia tension en el cable AC.
Tu =40 III
Determinaeien de los angulos, Ell primer Iugar se determinan los gulos a y {3 que definen las dlrecciones de los cables AB y AC. Se escnbe 7 ft 4ft =1.75
0
an-
) Iibre y el cable el cuerlcuetitra
T1f=6Ulh
tan o==
tanf3=
1.5 ft .~ 41't =0.3i5
0
a =60.26
J3 = 20.56
Diagrama de cuerpo libre. Se escoge el casco como cuerpo Ilbre, se traza el diagrama del cuerpo libre que incluye U1S fuerzas ejercidas por los tres cables sobre el C:LSCO, asi como la fuerza de arrastre F D ejereida pOl' I'llflujo. C0l1dici6n de equilibrio. Se elI.lll'esaque el casco esta en equilibrio y la resultante de todas las fue.rzas se escrihe como oero:
If
del 61Y sen 2
Q ,
= TAB
+T
+ TAE + FD = 0
x y y:
(1)
Como aparecen mas de tres fuerzas, se obtendran sus componeutes
40 Ib)
~('II
hO.21\" i
Flli
T..I.l \
-fRO lhlJ
-(40 lb) sen 60.2Goi + (40 Ib) cos 60.26°j = - (34.73lb)1 + (19.84 Ib)j TAc = TAe sen 20.56°i + TrIC COs 20.56°j = O.3512TACi + O.9363T.4.cj TA& = -(60 lh)j FD
uefia que se que la ano tncli-
= FDi
Se sustituyen las expresiones obtenldas en la ecuacion (1) y s faetorizan los veetares unitarios i y j, por 10 que se tiene
(-34.73 Ib
+ O.3512T"c + F D)i + (19.84Ih + O.9363TAC - GO Ib)j = 0
TO.
Esta ecuaci6n se mrnplira sl, y s610 si, los coeficientes de i y j son iguales a ceAsJ sa obtienen las siguiente~ dos eouaeiones de equilibrio, queex:presan, respectivamente, qu la suma de las eomponeutes z y 1a sum a de las cornponentes y de las fuerzas dadas debe sec cera. EFx == 0: IF!! = 0: -34.73 Ib + O.3512TAc + ED = 0 19.84 Ib + 0.9363T.~c - 60 lb = 0
(3) se enouentra (2)
:rpo libre, 'graJDa de
IS
(3)
TAe
= +42.9
sobre el 'en equieaer el vaa Ia de P.
FD= J.9.661b
De la ecuaeion
Ib
<III
= 20.5e-j
T-IC=4.2.9Qb
'\
T.-I.£a
_.
so Ib
Y sustttnyendo
elite valor en la ecuacion (2) se obtiene
FD = + 19.66 Ib
-4
=60.26°
A1dibujar el cli<lgrama de euerpo libre se supuso que habra un sentidn para ca-
T.1./I=40 Ib
rla fuerza desconooida. EI signo positive en la respuesta senaia que el sentido supuesto era el correcto, Puede dihujarse el poligono de fuerzas completo y as!
comprobar los resultados.
39
~{R E-~.S-O~l~(j 6 N CI
L ~ ,-
0 E PRO 8 L E MAS ~_j.iE:.N;,IF 0 R M A I N 0 E PEN 0 lEN T E
Cuando una partfeula esta en eqllilibrin, la resultante de todas las fuerzas que acnian sobre la partlcula debe ser igual.i:l cero. En el caso de una partfeula sobre la queactuan [uerza» copia!lares, expresar est!'!hecho proporoionard dos relaciones entre las fuerzas tnvolucradas, Como se via en los problemas resueltos que se acaban de .presentar, estas relaciones S6 pueden utilizar para determinar dos jnc6gnita.~ --como la magmtud y la direocion de una Iuerza 0 las magnitudes de dos fuerzas=-, En la solucion de un problema que involucre I'llequilihrio de una partfcula, el primer paen dibujar un diagram a de cuerpo Ubre. Este di.agrarua muestra Ia partfcula y todas las fuerzas que actnan sobre la ruisma, Se debe indicar en I'll diagram a de cuelpo fibre In magrutucl de Ias Iuerzas conocidas asr como cualquier <'ingulo 0 dimension que defina Ia direccion de una fuerza, Cualquier rnagnitud 0 {mgulo desconocido debe ser designado por un sfmbolo apropiado, No se debe mcluir ninguna otra informacion adieioual en el diagrama de cuerpo libre.
BO cOfl,siste
Es indispensahle dlbl!;ar un diagra,lna de cuerpo libre dare 1) preoiso 7Jara poder resolver cualq'u'ietprobiem.a de equilibria. La omisi6n de este paso puede ahorrar k1.pizy papel, pero es muy probable que esa omisien to lleve anna soluci6n ineorreeta.
Caso 1. Si s610 6stdn involucru(las tres fuerUls en el diagrama. de- cueIp0 Iibre, el res to de la soluei6n se lleva a cabo mas Facilrnente uniendo en un dibujo la parte terrnla aal de una fuerza con la parte inicial. de OITa, con el fin de formar un tridngulo de [uerzas. Este triau.gulo se puede resolver mediante gnillcas 0 por trigonornetrfa pant un m~1ximo de dos inc6gnjtas [problemasresueltos ,2.4 y 2,5J. Caso 2. Si estan intJolucradus mUs de tresjuerzas, 10 mas conveniente es empiear una
soluoiDri (ilwl[tica. Los ejes x y
lIU1
y se seleccionan y cada una de las fuerzas mostradas en el dia-
grama de cneIpO libre se descompone en sus compOllentes x y y. A] expresar clLll;! tanto la 5Ude las componeutes en !\' como Ia suma de las eomponentes en y de las Iuerzas son iguaJes a cero, se obtienen des ecuaciones Cj_uee puedcn resolver para no mas de des in06gnitas [pros blema resuelto 2.6}. Se recomienda que cuando se emplee una soluci6n analftica se escriban Ias ecuaciones de equilibrio en la rnisma forma que las ecuaoiones (2) y (3) del problema resuelto 2-.6. La practica adoptada por algunos estudi.antes de coloear al inicio las incOgnitas dellado izquierdo de la ecuaci6n. y las cantidades cenoctdas del Iado dereeho de la mlsma puede llevar a rma confusi6n al memento de aSlgnarle el signa correeto a cada uno de los termlnos. Se ha senalado que, independieaternente del metodn empleado para resolver un problema de equilibria bidimensional, s6lo pnede detemiinarse un maximo de dos Incognitas. Sl un problema bidimensional involucra mas do dos inc6gnitas, se deben obtener una 0 mas relaciones adicionales a partir de 1a informacion contenida en el enunciado del problema. Algunos de los siguientes problemas coutienen pequefias poleas, Se supondr:i que las mismas estan libres de frtecinn, por tanto, III tension en la cuerdn 0 cable que pasa pOI' una polea es Ia misma en carla uno de sus lades, En el capltulo 4 se expondra In razon par la que la tension es la rnisma,
40
Bgnra- Determine Ia tension en: (I.) el cable AG y b)el cable BC.
2.43
Dos cables seamarran juntos en C y se cargan como se muestra en
I_In
f
16 in
----.1-1 ~-~
2]in -----I Figura P2.44
FlguraP'2.43
2.44 Be.
Si
a=
25°, determine la tension en: a) el cable AG, b) en la cuer-
Flgur,s P2 .. 5 4
2.45 Se sabe que a = 50" Y que eJ agui16n AC ejerce sobre la articulaC una fuerza dirigida a 10 largo de la l1nea AC, determine: a) la magrutud fuena y b) la tensi6n en el cable BG. 2.46 Dos cables se amarran juntos en C y se c;rrgan como se muestra en Si a = 30", determine Ia tension en: a,) el cable AC, b) el cable BG.
300 kg
Figura P2.46
41
42
EsWica de partlcuJas
2.47 Un sistema de sillas para transportar esqaiadcres 813 detiene posicion mostrada en la Bgura. Si eada silIa pesa :300 N Y el esqniador en la l1a E pesa 890 N. determine eJ peso deJ esquiador en Ia silla F.
Figura
P2.47 Y P2.48
2..48 Un sistema de sillas para transportar esquiadores se detiene en posicion mostrada en la figura.. Si eada silla pesa 300 N Y el esquiador en ]a lla F pesa 800 N, calcule el peso del esquiador en ill silla E. 2.49 Los cuatro elementos de madera que sa muestran en la Figura ~ unldos con una plaea de metal y se encuentran en equilibria sometidos a 1a cion de cuatro fuerzas. Se sabe que FA = 510 lb YF/J = 4110lb, caleule las =::; uitudes de las otras dos fuerzas. 2.50 Los euatro elementos de madera que se muestran en.Ia figure unidos con 1IIla plaea de metal y se eneuentran en equilibria sometidos a 1a ci6n de cnatro fuerzas. Se sabe que FA = 420 Ih y Fe = 540lb, determine magnitudes de las otras dos fnerzas. 2,51 Las fuerzas P y Q se aplican al componente de una pieza de ensz., ble de avioo como se muestra en la figura. Se sabe que P = 400 lb y Q = 52£ Y que la pieza de ensamble se eneuentra en equilihno, determine las magnr:. des de las fuerzas ejereidas sobre las barras A y B.
Figura
P2.4,9 Y P2.50
Q
Figura P2.51 Y P2.52
2.52 Las fuerzas P y Q se aplican al componente de una pieza de ens: bJe de avian como se muestra en la figura. Sabiendo que la pieza de ensarn encuentra en equtlibno y que las magnirudes de las fuerzas ejercidas sobre barras A y B son.F A = 600 lb y FB = 320 lb. determine las m'lgnitudes de P r
iene en la JT en 1a si-
2.S3
Dos cables se amarran juntos en C y 58 cargan como se muestra en Se sabe que W = 840 N, determine la tension: a) en el cable ,AG, y .el cable BG .
Problemas
43
.2..54
Dos cables S8 amarran juntos en C y se cargan como se muestra en . Determine el rango de valores de W para los cuales la tensi6n no se_or de 1050 N en cualquiera de los cables.
1300
TlUlI
~-I-----750
mn; ----
.......
[I
_m
....
:tiene en la lor en la siFigura P2.S3 Y P2.54
A
£gum estilll idos a la aoule las mag-
figura estan idos ala acstennine las
:a de ensam. Q =520 lb las magnitu-
2~55 La cablna de un teiefel'ico se mneve H veloctdad constante mediancable DE y se sostiene.mediante un conjunto de peleas, las cuales pueden lilnemente sobre el cable de soporte ACB. Si a = 40 Y f3 = 35°, el pebinado de la cahina, su sistema de soporte y sus pasajeros es de 24.8 kN, niendo que la tension en el cable DF es despreciable, caleule la tension: e1 cable de soporteACB. b) en el oable de .arrastre DE.
Q
2.56 La eabina de un teleferico se mueve a velocidad constante mediancable DE y se sostiene mediante un conjunto de poleas, las cuales pueden hbrernente sobre el cable de soporte ACB, Si a= 42 y {3= 32", la tenal el cable DE es 20 kN, y suponiendo que la tension en el cable DF es - reeiahle, determine: a) el peso eombmado de la cabina, su sistema de so- y sus pasajeros y b) la tension en el cable de soporte ACB.
0
2.57 Un bloque de peso W esta suspendido de una cuerda de 50 mm de d Y de dos resortes cuyas longitudes sin estirar son de 450 mm. Sabienlas eonstantes de 16s resortes son kAB = 1500 N/m y kAD = 500 N/m, ....rune: a) la tension en Ia cuerda y b) el peso del bloque.
-Figura P2.55 Y P2.S6
f-----
580 mm
----r--~
400
!n1I1 ____..
160 rnm
1
320 rnm
:za de ensame ensamble 56 idas sobre las des de P yQ.
44
Esbi1ica de partk:uIa.s
2.58 Una carga con un peso de 400 N estii suspendida de un resorte dos cuerdas, las euales estan unidas ados bloques de pesos 3W y W como rnuestra en la figura. Se sabe que la constante del resorte es de 800 1m, determine: a) el valor de W y b) la longitud sin estirar del resorte.
'---840
mill ---J-<c---
690 mm
r-1.
5m
~I' 1.51111
c
360 rnrn
..
j
3W
Figura P2.S6
lO!JIIN
Figura P2.60 2.59 Para los cables y cargas del problema 2.46, calcule: a) el valor de para el cualla tension en el cable Be es Ill.minima posible y b) el "alar COrTe§. pondiente de la tension, 2.60 Las porciones AC y BC del cable ACB deben ser iguales, por fa debe de caleular la longitud minima que debe tener el cable para soportar carga mostrada si la tension en este no debe ser mayor a 725 N. 2.61 Dos cables S6 amarran juntos en C y se cargan. como se mnestra Ia figura. Se sabe que la tension maxima pennisihle en cada cable es de 200 determine: a) 1<1 agrutud de I-a fuerza P masima que se puede aplicar en C m b) el valor eorrespondienee de fl. 2.62 Dos cables 5e amarran juntos Ia figura Bi la tensi6n miixima pennisible 1b en el cable BC, calcule. G.) la magnitud aplicar en C y b) el valor correspondiente
ell C
Figura P2.61 Y P2.62
y se cargan como se muestra enel cable AC es de 300 lb y de is de la fuerza P maxima que se p~ de fl.
2.63 Para la estruetura y la ca:rga del problema 2045, determine. a) el de a para el cualla tension en el cable Be es minima y b) el valor cortes pondiente de la tension.
lOT
2.64 El aguil6n..AB esta soportado por e1cable BC y una bisagra en A_ el aguilon ejerce sobre el pnnto B una fuerza dingida a 10 !.argodel aguil6n • tension en la cuerda ED es de 70 Ib, calcule: a) el valor de fl para e1 cual la sion en eJ cable BC es minima y b) el valor correspondtente de la tensi6n
Figura P2.64
2.65
EI colla:rin A se puede deslizar sin friccion sobre una barra verti
y esta conectado a un resorte como se muestra en 120 :6.guraP2.65 y P2.66. I...
constants del resorte es 660 N/m y este no; esta estirado cuando It = 300 mr Se sabe que el sistema esta en equilihrio cuando h = 400 mm, determine el so del, coIlarin.
esorte y xnno se rim, de-
El collarfn de 40 N de peso se pnede desl:izar sin frir:ci6n sobre una 'ft"rticaJ y esta conectado a un resorts CODIO se muestra en In figura. "EireDO esta estirado cuando h =' 300 rum. Se sabe q\le 1a censtante del resor'1m, determine el valor de h para el coal el sistema esta en equilibria. na caja de madera de 280 kg esta sostenida par varies arreglos de euerdas, como se rnnestra en la -Agura. Calcnle la tension en la cuerda ~., ........... an:eglo. (S1Jgerencia: la tensi6n es Ia misma en ambos lados de una ;JE! pasa por una polea simple. Esro se puede comprobar utilizando los _ __..__del capitulo 4.)
2.12. Componentes
rectangulaws de una fu erza en el espacID
45
1 ~I
690
null
r
L
II
(1) Figura. P2.67
b)
0)
d)
e) Figura
L300mm_J
P2.65 Y P2.66
Hesuelv» los fncisos b ya del problema 2.67 pero suponga que el libre de Ia cuerda esta amarrado a la caja de madera,
valor de
0'
ilor oorres,por 10 que soportar ltl
Una carga de 350 Ib 85M sostenida por el ar.reglo de euerdas y pose mnestra en la figura. Se sab que f3 = 2.5",determine la magnitud y :-t:::oa::.iQn de la fuerza I) que debe apllcarse en el extremo libre de la cuerda ener nl sistema en equilibrto. (Vease III sugerencia del problema 2.67.) Una carga de 3S0 lb esta sosteruda por el arreglo de cuerdas y pose rnuestra en la figura. Sf se sabe que tl' = 35 determine: (J,) el anb) la magnitud de la Iuerza P qne debe aplicarse enel extremo Uhre ~ pant mantener a1 sistema en equihbno. (Vease la sngerencia del 2.67.)
0 ,
muestra en
s de 200 lb,
licar en C y
muestra en lIb Y de' 150 ue se puede
La earga Q esta apllcada en Ia polea C, III cual _puede rodar sohre el .GB. La polea se sostiene en la posicion rnostrada mediante un segundo J), el eual pasa a traves de la polea A y sostiene una carga P. Si P = 800 ermine: a) la tension ell el cable ACE y b) la magnitud de Ia carga Q. Una carga Q de 2 000 N' esta. aplioada en Ia polea C, la cual. puede re e1 cable ACB. La polea se sosttene en la posici6h mostrada median:.'g!lDdo cable CAD, el cnal pasa a traves de Ill.polea A y sostiene una CaTermine: (L) Ill. tension en el cable AGE y b) la magnltud de la carga P.
Figura
P2.69 Y P2.70
ine. a) I'll va.. valor COITes-
5 EN EL ESPACIO
:agra en A. Si J agui16n y la ::1 emu L1. tenI tensi6n barra ve rticai 5 y P2.66. ,La h = 300mm. :ermine I'llpePONENTES ESPACIO RECTANGULARES DE UNA FUERZA
p Q Flgu.ra P2.71 y P2.72
_A-'--'::LIJd
emas considerados en la primera parte de este capitulo tratados dirnensiones y pudieron formularse y resolverse en un 50En esta seccion y en las siguientes del capitulo se analizaran ~ __ ...,que cornprenden las tres dimensiones del espacio, 'derese una fuerza F que aetna en el ongen 0 del sistema de s rectangulares x, y, z. Para definir la direcci6n de F, se pue......
46
Estatica dB parucutas
de trazar el plano-vertical OBAC que contiene a F y que se rnuestn, la:B.gurn 2.30a. Este plano pasa a traves del eje vertical y; su orien esta definida por el angulo cP que forma con el plano xy, mientras _ 11 direecion de F dentro del plano esta definida par el angulo 9y forma F con el eje y. La fuerza F puede descornponerse en una ponente vertical F y Y una componente horizontal F h; esta ope mostrada en Ia fignra2.30b, se realiza en el plano OBAC de acuerda 1<1.5 reglas desarrolladas en Ia primera parte del capitulo. Las camp ~ tes escalares correspondientes son
Fy
=F
cos
By
Ph
F sen
fly
La F" puede separarse en sus dos componentes rectangulares F", Y 10 largo de los ejes x Yz, respectivrunente. Esta operacion, mostradz la figura 2.30c, se realiza en el plano xz. De esta rnanera se obtienee eAl>resiones siguisntes para las componentes escalares correspondiea; Fx = F},cos ¢ = F sen By cos ¢ F;: = F,! sen ¢ = F sen ()!I sen ¢
11.
l"
La fuerza F se ha descompuesto en tres cornponentes vectoriales . tangulares Fx> Ey, Fz, dirigidas a 10 largo de los tres ejes coordena., Si se aplica el teorema de Pitagor:as a los triUngu1gs GAB y OCD Ia flgura 2.30, se eseribe
p2 = (OA)2
C
;;
F1. = (oel
+ (BA)2 = + Fl = (On'f + (DCf = F~+ F;
(OB)2
F:
b)
I
F
D x
Si re eliminan F~ de estas dos ecnaciones y se resuelve para F se ne la siguiente reJ.aci.6nentre Ja magnitud de .F y sus componentes tangulares escalares: La relacion que existe entre la Iuerza F y sus tres component ~ Fy YF, se presenta mas facil si se traza "una caja" que tiene par an, Fx> Fy YF~. como se muestra en la figura 2.31. La fuerza F esta I'i sentada pOT la diagonal 0.1. de esta caja. La figura 2,31b muestra el gulo rectangulo OAB empleado para deducir la primera de las fOmt (2.16); Fy = F cos Oy. En las figuras 2.31a Y G se han trazado otros triangulas reetangulos: el OAD y OAR Estos ocupan posiciones [antes a Ia del triangulo OAB. Si representamos pOI Ox Y O~ los an que forma F con los ejes :r y z, respectivamente, se pueden escribir f6nnllLas semejantes a Fy = F cos By. Entances se escribe Los tres angulos ()", fly Y 8""definen la dir:ecci6n de la Iuerza F; . m,is usaclos gue los anguJos By Y ¢ introducidos al comienzo de esta cion, Los cosenos de 8!1:'.8y Y f)", se conoeen como los cosenos d.irectL de la [uerza F. Con el usa de los vectores unitarios i,.i y k, dirigidos a 10 law los ejes z, y Yz, respectivamente (figura 2.32), se puede expresar F 1a forma
B
l"
'I
c)
Figura 2.30
Figura 2.31
donde las cornponentes Iaciones (2.19).
escalares
r; Fy
F",
estan definidas
r=
Ejemp/o 1. Una fuerza de 500 N forma angulcs de 60 45c y.l2(J'" los ejes x, IJ )' z, respectivamente. Enouentre las componerrtes Ex. Fy YF~ fnerza,
0 ,
.uestra en
ientaci6n
ntras que
astituyendo F ~ • 5e escrihe
500 N, Ox
50°, By
0
45° Y B,,=
1200 en las f6rmula.~
2 12. Cornponentes
reclangu ares
do;
iuerza en e espa
47
10 8y que
una com-
Fx
iperacion, uerdo can
omponen-
PI) =: Fz =
(500 N) cos 60 = +250 N (500 N) cos 45 = +354 N (500 ) cos 120 = -250 N
0 0
en la ecuacion (2.20) los vaIores obtenidos para las componentes esoade F, se tlene F
=
(250 N)j
+ (354 )j - (250
)k
(2.16)
;F_, y F, ~
ostrada en )tienen las
en eI GaSO de los problemas en dos dimensiones, el signa pokitivCiindica componente tiene el misrno sentrdo que el eje correspondiente y el sigtivo tiene el sentido opuesto, El
ondientes: (2.17) males rec)rdenados. yOCD de
angola que una fuerza F forma can un eje debe medirse desde
0
positive del eje Ij estar~'i siempre comprendido entre 0° y 180 angulo menor que 90° (agudo) indica que F (que se supone uni1 origen) est<! del mismo Iado del plano yz que el eje x positive, y r y F; seran positives. Un angulo (}.x mayor que 90° (obtuse) indi• que Festa al otro lado del plano yz; entonces, cos e; y F,. seran ne. En el ejemplo 110s angulos 8., y 8y son agudos, mientras que f);t 0; en consecuencia, E'" y Fy son positivos, rnientras que F, es neo. i se sustituye en la ecuaci6n (2.20) las expresiones obtenidas para - ;!I y F" en (2.19), se escribe
ex
: ;1;j
--"
-D
1:
F se obtie-
F = F(cos 0",1 + cos Oy) + cos 8",k) muestra que fa fuerza F puede expresarse como el producto F y del vector A = cos
(}xi
(2.21) del es(2.22)
Figura 2.31
centes rec(2.18) nnentes Fr, , por aristas
esta repree
+ cos Oyj + cos 8.::k
IJ
-ector A es evidentemente
;tra el trianas formulas lo otros dos
un vector de magnitud 1 y de la misma '6n que F (figura 2.33). EI vector onitario A se refiere allargo de de acci6n de F, De (2.22) sa deduce que las componentes del unitario A son, respectivamente, iguales a los cosenos direetores
linea de accion de Ax
F:
Ay = cos 8y
A .. = cos 8",
.ones semelos angulos
escribir dos
== ios 8~
(2.23)
Se debe ohservar que los valores de los tres :ingulos Ox,8y Y f}", no rndependientes. Expresando que 1a SUIDa de los cuadrados de las ponentes de A es igual al cuadrado de su magnitud, se escribe
/
Flgura 2.32
(2.19,
\2+A2+A:=1 _ "x y
=stituyendo para Ax, Ay•
-za F; y son
de esta sealS
I
x, de (2.23),
(2.24)
direeto1"e&
10 largo de
'FI'eSIll" F en (2.20
IS
por las reo-
ejemplo 1 se muestra que una vez que se han seleccionado los val" = 60° Y ()y = 45°, el valor deO~ debe ser igual a 60" 01200 pa. aeer la identidad (2.24). uando las componentes F", Fy Y F; de una fuerza F estan dadas, ~tud F de la Iuerza se obtiene de (2.18). Entonces las relaeiones pueden resolverse para 10s cosenos directores, cos 8ce
= F" F
cos By -
_ ffL
F
cos ()~ =
F_
-=.
5° Y 120 con .s, yF: de
0
(2.25)
Figura 2.33
er los angulos
e; 8y
y (): que caracterizan
ala direccirin de F.
EJemplo 2. Una fuerza Fliene las componentes J.>';, = 20 lb, Fy = lb y F~ "" 60 lb. Determine Ia magnimd de F y los angulos 0"" fJy Y 6~ que rna CUD los ejes coordenados, _A partir de la formula (2.18) se obttene
F=
VF!+~+~ "" Y(20 Ibj2 + (-30 = v4900 lb '""70 Ib
Ib)2 + (60
lb)2
Si se sustituye los valores de las componsntes y la magnttud de F en. las clones (2.2,5), se escribe oos 8"
=F
F"
20Th = 70 Ib
MOO
Calculando sucesivamente cada cociente y su
eoseao, sa obtiene
8",
= 31.0
Estos ealculos pueden reahzarse facilrnent€
COIl
una ealculadora.
2.13. FUERZA DEFINIOA EN TERMINOS DE SU MAGNITUD Y DOS PUNTOS SOBRE SU liNEA DE ACCION En muchas aplicaciones ill direcoion de una fuerza Festa defmida las coordenadas de dos puntas M(Xl, Ijh Zl) Y N(X2, !jz, Z2), lo~
sabre su linea de acci6n (flgura 2.34). Considers el vector MN que ~ aMy Ny tiene el mismo senndo que F.
ov------- x
z Figura 2.34
Si se representan sus componentes escalates por d.,.. dy y d~, respectr mente, se escribe
(2..,..,
El vector unitario
al dividir el vector MN entre MN. Se sustituye para MN de (2.26) y se observa que M1 ' igual ala distancia d de MaN, se escribe
largo de la~ea MN) puede obtenerse
magnitud
A a Io largo de la lfnea de acci6n de F (es decir
= ~~
= ~ (dxi
+ dJ + tl"k)
Es importante recordar que F es igual. al producto de F y A, ,pol' 10 se tiene
'y = ~30
2.14. Aciici6n de ftJerzas concurrentes
~que for-
(2.28)
en el espado
49;
euaI se sigue que las componentesescalares
de F son, respectiva-
(2.29) las ecua-
reiaciones (2.29) simplificanen forma considerable la determi-
.=
GOlb
701b _
de las componentes de las fuerzas F de magnitud F cuando la liaecion de F esta definida. par dos puntas M y N. Restando las
.=:c::::::!.:5Ja~:
de M de las de N S8 determinan primero las compoilentes r MN y la distancia d de MaN: d, = X2
-
Xl
.
d!J = Y2
Yl
d; =
d·.z
2
Z2 -Zl
d = Yd
;>;
+d2y+
JD
furida por
yendo los valores para F y para d..." ely> rh y d en las relaciones se obtienen las componentes E" Fy Y F;:;de La [uerza. angulos Ox, (jy,()z que forman F can los ejes coordenados puehtenerse de las ecnaeiones (2.25). Comparando las eeuaciones 2...27) tarnbien se puede escribir
(2.30) .:i:!::!noinar los angul()s (l"" ()m .::.li1:a;::m- nd del vector MN.
acalizadas
1 que
une
e; directamente
de las componentes y
melON
DE FUERZAS CONCURRENTES
EN EL ESPACIO
--£tmte- R de dos a mas fnerzas en el espacio se calcula sumando nentes rectangulares. Los metodos gnilicos 0 trigouometricos
f:::eJ:zas coplanares, Se estahlece que
R=LF ~ne respectiva(2.26)
:nuy pnicticos en el casu de fuerzas en el espaeio. -- metoao seguido aqui es semejante al empleado en la seecion 2.8
'cada fuerza en sus componentes rectangulares y-se escdbe
R; + R,J
+ R,,;k= 2:(Pc~i + F J + F"k) = .cSF.-)j + (IFy)j + (SFz)k
(2.31)
mal se desprende que
N entre so
Ille MN es
decir a
10
~-:Utud de la resultante y los angnios (let. By y (j: queesta forma con ce eoordenadas S8 obtienen par el metoda de ill secciou 2.12. Se
(2.27)
(2.32) (2.3.3)
por 10 que
PROBLEMA RESUELTO 27
El alambre de una torre esta anclado en A por medic de un peOlo. La tensi.6r en el alambre es de 2 500 N. Determine a) las eomponentes F", FIJ Y Fz de:" fuerza que acnia sobre el perno y b) los angulos 8~, By Y 9" que definen la drreccion de la fuerza,
a. Componentes
de la fuerza.
La linea de aceicn de 1afuerza que
ac,-
tria sabre el perno pasa EQ! A Y B, Y Ia fuerza esta dirigida de A hacia B. componentes del vector AB, que tienen Ia misma direecion que la fuerza,
d.: =
-40
A
ill
ely "" +80m
es
.ilz=
+30 m
La dlstancta total de
AB
= d == Vel; + d; + d;=
94.3 m
C<JOr-
Al representar pot i, J Yk los vectores unitarios a 10 largo de los ejes denados, se tiene
x
AB
-(40 m)i
+ (80 m)j + (30 ro)k
lntroduciendo el vector unitario A = AS/AB, se escribe
F= FA. =
F-- ""---AB AB 94.3 m
Ali
2500N-
Si se sustituye la expresi6n encontrada para F F
POT
AB, S6 cbtiene
= ~~:
=
[-(40 m)l
+ (SO m)j + (30 m)kJ
-(1060
N)i + (2120 N)j
+ (795
N)k
consigulente, las compOllentes de F son Ex
-1060
Fy
COD
+2120 N
Fo.
+795 N
b. Direcci6n de la fueraa,
8.=
Ins ecuuciones (2,25), se esoribe cos
F,/ es = ~F
= ----
t'OS
F"
-1060 N = 2500N F_ F
+2120 N 2500N
cos 8.
= -=-
= -----'
+795 N 2500N
:t
Si se calcula suoesivarnente cads coeiente y su arco coseno, se obtiene
(J:r =
115.1°
8" = 7l.5°
(Not(l, El resultado tam bien, pudQ .haberse determinado coo las componen Ia magnitud del vector liB ell Ingar de la fuerza F.)
50
PROBLEMA RESUELTO 2.8
a tension -E: de la
m; la dl-
Una seceien de Lilla pared de concreto pracolado se sostienetemporalmente por los cables mostrados. Se sahe que la tel)si6n es de 840 lb en 61 cable AB y 1 200 Ib en el cable AG. determine la magnitu8 )' la dlreecton de Ia resultante de las fuerzas ejercidas por los cables AB y AC sabre la estaca A.
SOLUCI6N
a que ac-
:ia B. Las serza, SOIl
Componentes de las fuerzas. La fuerza ejercida por cada cable sabre la estaca A se descornpondra en sus compon6nte$:t, y y ~Primero se deterrninaran las componentes y la magnirud de los vectores AB y AG, midiendolos desde A bacia In seecion de Ia pared. Si se representa por i, j Yk a los veotores uniJ:arios a 10 largo de los ejes coordenados, se escribe
AB AG
ejes
COOI-
ee
= -(16
0-(16 ft)i + (8 ft)j + (11 ft)k ft)i + (8 ft)j - (16 ft)k
AB
21 ft
AB, se tiene
AC :::::24 ft
AI representar par hAll TAB
at vector nni:ta.rio a 10 largo de la linea
r.
TABAAB
= TABAR
AB
= 2iftAB
8401b-
AI sustirufr la expresi6n encontrada para TAB TAB
=
AB, se obtiene
+ (8 ft)J + (Ll ft)k]
Ib}k .
8401h 21 it [-(16 ft)i -(640 Ih)i
+ (320 lb)j + (440
Si se .representa con h.Ac al vector unitano a 10 largo de AC, se obtiene en forma samejante TAC TAC
= TAcA.Ac:::: TAG
AC =
AC
12001b24 it AC
= -(800 Ib)i + (400 Ib)j - (800 Ib)k
La resultants R de las fuerzas ejercidas por -(1 440 lb)i
,N nbe
Resultante de las fue~. los dos cables es R = T,.\8 + Ttle
+ (720 Ib)j - (360 Ib)k
S8
La magnitud y direccton de la resultante
determinan par
y'R~
+ R~ + R; = Y(-1440l
+ (720)~+ (-360)2
R=16501b
De las ecuaciones (2.33) se obtiene cos Ox ne ..5" ponentes y cos B;:;. =
= R=
a.
-144.olb 1 650 Ib R_
cos 0
R +7201b = -.y = ----,R
16.501b
Ii
-360 ib 1 6.50 lb
Calc ulan do en forrna sucestva cada cociente y su arco coseno, se obtiene B;r = 150.8a By
= 64.1
8=
= 102.6°
...
51
En esta lecci6n 5e via que las [uerzas en el espacia pueden ser definidas por su magnitud y su dlreecion 0 pOT las tres componentes rectangulares Fen Fy y Fz. A. Cuarulo una Juerza se define por 8U magnitud y 8'U cUrecci6n, sus componentes rectangulares F.: F!J y F" se pueden determinar de la iguiente manera:
1. Si la direccion de la fue:rza Festa deflruda par los angulos 8y Y cp mostrados en Ia figura 2.30, las proyecciones de F a traves de estes angulos 0 sus complemento proporcionaran las componentes de F [ecuaciones (2.17)]. Observese que las componentes x y z de F se obtienen pIoyectando primero a F sabre e) plano horizontal; eatonces, la proyecci6n F h obtenida de esta forma se descampone en las componente F,. y F" (:figura 2.3Oc).
Caso
Cuando se resuelven problemas de este tipo, se recornienda dibujar primero la fuerza F y despuessu proyeccion F" y sus componentes Ex. Fy y F:. antes de tniciar la parte rnatematica de la soluci6n. Caso 2. Si la direccion de la fuerza Festa deflnida par los aogulos fJx• 6, y e, que F forma can 105 ejes coordenados, cada componente se puede obtener mJ'tipllcanclo la magnitud F de la fuerza por el coseno del angulo que le corresponds [ejemplo 1]:
Caso 3. Si 1a direcci6n de la fuerza Festa definida por dos pnntos M y N ubicados a 10 largo de su linea de accion (figum 2.34), primero se expresa al vector MN dibujado desde M basta N, en terminos de sus componentes d~, dy y d-z y de los veetores unitarios i, j Y k.
Despues se dete~a el vector unitario A a 10 largo de la linea de acci6n de F clividiendo al vector MN entre su magnitud MN. Sf se multiplica a A par la magnitud de F, 5e obtiene la expresion deseada para F en terminos de sus compouentes rectangulares [problema resuelto 2.7]:
Cuando se determinan las componentes rectangulares de una fuerza, es conveniente emplear un sistema de notacion consistente y con Significado. El metoda utilizado en este texto se ilustra en el problema resuelto 2.8 donde, pOI" ejemplo, la fuerza TAB actuadesde la estaea A hacia el punta B. Observese que los subindices han sido ordenados para coincidir con la direccion de 1afuerza. Se recomienda adoptar la misma notaci6n ya que Ie ayudara a identificar at punta 1 (el primer subfndice) y al punta 2 (e1 segundo subfndice).
52
Cnando el vector que define la linea de aceion de una fuerza se forma, puede pensarse en sus oomponentes escalares como el,mimero de paSos que debe efectuar, en eada direecion coordenada, para it desde el punta 1 hasta e1 punta 2. Es esencial que siempre se reouerde asignarle e1 signa correcto a cada una de las componentes, B. Cuando Ufla Juerza estd definida por 81,18omponente8 c YF",. se puede obtener su magnitud F asf rectangulares F"" F y
Los cosenos directores de lalfnea de acci6n de F sa pueden deterrninar dividienda las camponentes de la fuerza entre F: cos 9'):=
F
pt
cos 8
= ___!f_
F
cos 8Z =
--"F
F_
A partir de los cosenos directores se pueden obtener los angulos Ox, By y 9" que F forma can los ejes coordenados [ejemplo 2]. C. Para determinarla re8ultante R de dOB 0 masjuerzas en el espaeio tridimensional, primero S6 determinan las componentes rectangulares de eada una de las fuerzas utill:zando alguno de Los procedimientos que se acaban de describir. Con la suma de esas cornponentes 58 obtendran las componentes R,;, Ry YR." de la resultante. Entonces, Ia magnitud y la direccion de la resultante se puede obtener como se sefialo en los incises anteriores para e1 caso de una fuerza F [problema resuelto 2.8].
2110lh
2.73 Determine a) las componentes x, y y z de la fuerza de 200 Ib Y b los ingu10s 8". fly}' 8z; que Ia fuerza fonna COnlos ejes coordenados, 2.74 Determine a) las eomponentes .1', y Yz de Ia fuerza de 420 1b y b los angulos Or. By y 8;; que Ia fuerza forma con los ejes coordenados, 2.75 Para estabilizar un iirbol parcialmente arrancado durante una tormenta, se amarran los cables AB y AC a la parte alta del troneo del arhol y despues se fiJan a barras de aoero clavadas en el suelo. Si la tension en el cable AB es de 4.2 kN, determine: a) las componentes de la fuerza ejercida par este cable sabre el arbol, y b) los angulos (J~, Oy Y e; qlle forma Ia fuerza en A can los ejes peralelos a los ejes coordenados, 2..76 Pant estabilizar un ihbol paretalmente arrancado durante una tormenta, se amarran los cables AB y AC a la parte alta del tronco del arhol y despues se £ijan a barras de acero clavadas en el suelo. Se sabe que la tension en el cable AC es de 3.6 kN, determine: a) las componeotes de la Iuerza ejercida por este cable sobre elarbol, y b) los angulos 8." O!! Y ()~que forma la fuerza en A con los ejes paralelos a los ejes coordenados, 2.77 Una plaea circular contenida enel plano horizontal esta snspendida por tres alambres que forman angulos de 30° can respecto a la vertical; los alambres se eneuentran unidos a till soporte en D. Si Ia componente x de In fuerza ejercida por el alarnbre AD sabre Ia placa es de 220.6.N, determine: a) la tensi6n en el alambre AD y b) los angulos e; fly Y 0;; que la fuerza ejercida en A forma con los ejes coordenados,
Figura P2.75 Y P2.76
Figura P2.73 Y P2.74
2.78 Una placa circular contenida en el plano horizontal esta suspendida par tres alamhres que forman angulos de 30° can respeceo a Ia vertical; los alambres se encuentran unidos a un soporte En D. Si In componente z de la fuerza ejercida por el alambre BD sabre la plaea es de -64.28 N. caleule: a) la tension en el alambre BD y b) los angulos B~, By Y B" que la fuerza ejercida en B forma con los ejes coordenados. 2.79 Una placa circular horizontal esta snspendida par tres alamhres que forman angulos de 30° con respeeto a Ia vertical, los alarnbres se encuentran unidos a un soporte en D. Se sabe que la tension en el alambre CD es de 120 lb. determine: a) las eomponentes de 1<1uerza ejercida por este alambre sobre f la pIaea y b) los angulos ()", By Y 6: que la fuerza forma can los ejes coordena-
dos,
2.80 Una placa circular horizontal est-a suspendida por tres alarnbres que forman angulos de 30° con respecto a la vertical. los alambres se encuentran unidos a ua soporte en D. S1 la componente x de Ill.fuerza ejereida por el alambre CD sobre la placa es de -40 Ib,calcule: al la tension en el alambre CD y b) los angulos (Jx, 8y Y fJ~ que la fuerza ejemida en C forma con los ejes coordenados.
Agura Pl.77, P2 .. 8, P2.79, Y P2.80 7
2.81 Determine la magnitud y direccion de la fuerza F = (8001b)i (260 Ib)j - (320 lb)k.
54
2..82 Calcule la magnitl.1d y direceion de Ia fuerza F - (300 N)k.
(400 N)i ~ (1200
Problemas
55
2..83 Una fuerza aetna en el oogen de un sistema coordenado en la diree.de8nida por los angulus 8~ = 64.so y Boo = 55,9°. s. IIIcomponente Ij de la es de ~2()0 N, determine: a) e1 angnlo By. y b) las cornponentes restantes =rgnitud de 1<1 fuerza. 2.84 Una fuerza aetna en el origen de un sistema coordenado en In direcde6nida por los angulus Bx = 75.4 y8y = 132.6c• Se sabe que In compo;;, de In fuerza es de -60 N. determine: a) eI angulo 8.., y hJ las mmtes restantes y la magnitud de la fuerza,
0
lOO lb y b)
izo Ib y b)
:e una torabol y des~ cable AB -or este cal A con los
2-85 Una fuerza F de magnitud 400 N aetna en el origen de un sistema
ado. Si 8" = 28.5°, Fy = -80 N. YF, F~ y b) los angulos 8y Y e;
?
O. determine: a) las componeD-
86
~D.
Una fuerza F de magnitud 600 Ib acttia en el (jrigen de LlI1 sistema Se sabe qlle F;r = 200 lb, B~ == 136.8°, Y Fy < 0, ealcule: a) las comFy y Y b) los angulos e, y By.
r.
te una torirbol y destension en -za ej ercida a fnerza en
2..87 Una torre de transrnision se sostiene par tres alambres, Loscuales es_ ................... os mediante pemos en B, C YD. Si la tension en el alambre AB es de _'. determine las componentes de Ia fuerza ejercida pOl' el alambrc sobm enB.
suspendida 11;los alamIe ia fuerza s: a) la tensroida en A
suspendida ali ]05 alam.le la fuerza
!: a)
Ja ten-
ereida cn B
;:
ambres que
encuentran
Figura P2.87 V P2.88
') es de 120
anbre sabre
s eoordena-
.-:.:.l"""lJU:;
arnbres que
encuentran
Una torre de transmision se sostiene par tres alambres, los cuales €Smediante perllOs en. B, C yD. Si In tension en el alambre .AD es de determine las componentes de la fuerza ejercida par el alambre sobre euD. Una placa rectangular est:i sostenida par los tres cables que se rnues-
par el alamunbre CD ejes coord
~ figura. Si In tension -en el cableAB eli de 204 lb. calcule las componeufue.1:Za ejercida sobre In plaea en 8.
na placa r ctangular esta scstenida pOl' los tres cables que se muesSi 111 tension ell el cable AD es de 1951b, determine las comde la fueraa ejereida sobre la plac..'l enD.
~"'Urn.
Drmensiones
en pulw>das
t800 lb)i '
Figura P2.89 V P2..90
56
Estatica de particulas
2.91 Una barra de acero se ha doblado para formar un anillo semicircular de radio 0.96 m que esta sostenide parcialmente par los cables BD y BE, los CUllles estan unidos al anillo en B. SUa tensi6n en el cable BD as de 220 N, determine las componentes de la fuerza ejeTcida por el cable sabre el soporte en D.
!I
-:
1.28
HI
0.96m
":1
LJ
1.20
ill
Q Figura P2.91 Y P2.92
2.92 Una harm de acero se ha doblado para format un anillo semicircular de radio 0.96:oJ que esta sostenido parcialmente por los cables BD y BE, Ioseuales estan ualdos al anillo enB. Se sahe que Ia tension en e1 cable BE as de 250 N, calcule las componentes de la fuerza ejercida por el cable sobre el soporte en E. 2.93 Encuentre la magnitud y la direeclon de la resulrante de las dos fuerzas mostradas en la figura, si P = 500 Ib Y Q = 600 lb. 2.94 Calcule la magnitud y la direccion de la resultante de las dos fuerzas mostradas en la figura, si P = 600 N Y Q = 400 N. 2.95 Si las tensiones en los cables AB y AC son de 850 N Y 1 020 N. res-
Figura P2.93 Y P2.94
pectivamente, determine la magnitud y Ia direcci6n de 1'1. resultante de las fuerzas ejerciclas eo A por los dos cables.
Figura P2.95
eroicircWar
2.96
rIE, los cuaN, determienD.
y de 850 N en el cable
Suponga que en el problema 2.95 Ia tension es de 1 020 N en el caAC, determine la magnitud y la direccion de la rede las fuerzas ejercidas en A pOI los doscables.
2.15. Equilibria de una particula en eI espacio
57
2.97 Para el anillo semicircular del problema 2.91, determine la magnttud ..!irecci:onde la resultante de las luerzas ejereidas en B por los oables, si las -es en los cables BD y BE son, respeetivamente, de 220 Ny 250 N. Para estabilizar un arbol parcialm nte arrancado durante una torlos cables AB y AC a 13'parte alta del tronco del arbol J desse 6jana barras de acero elavadas en el suelo, 5i In tension en el cable AB - 20 Jb y la resultante de las fuerzas ejercidas en A par los cables AB y AC =teneeen al plano yz, determine a) la tensi6n en el cable AC y b) la magnjmrecci6n de la resultants de las dos fnerzas,
S<! amarran
2.98
Para estabilizar un arbol parcialmente arraneado durante una torse arnarran los cables AB y AC a la parte alta del tronco del arbol y des- se fijan a barras de acero elavadas en el suelo, Si la tension en el cable AC 850 Ib y la resultants de las fuerzas ejercidas en A por los cables AB y AC ~n al plano y-z, calcule: a) la tension en el cable AB y b) la magnitud y ...::iQn de la resultants de las dos Iuerzas.
2.99
100 Para la placa del problema 2.89, determine la tension en los cables ill s.i la tension en eJ cable AC as de 27 Ib Y la resultante de las fuerzas . ilasen A por los tres cables debe S8r vertical.
semicircular los cuaes de 250 N, ioporte en E.
r BE,
Figura P2.98 y P2.99
EQUILfBRIO DE UNA PARTiCULA EN EL ESPACIO ;.:..;:uerdocan la definicion dada en la secci6n 2.9, una pa.rticula.A esequilibria si la resultante de todas las fuerzas que aoniansobre A m, Las componentes Rx, Ry y R",de la resultante estrin dadas l:Wciones (2.31); expresando que las componentes de la resultants
~las dos fuerdos fuerzas
IS
r=
1020 N, reste de las fuer-
a:ro, se escribe
(2.34)
eenaciones (2.34) representan las condiciones necesarias y suficienel equilibria de una partfcula en e1 espacio. Estas pueden usarresolver problemas que tratan can el equilibria de una particula que intervienen no mas de tres incognitas. zra resolver estos problemas se traza un diagrams de cuerpo Iibre estre la partfcula en equilibrio y todas las fuerzas que acnian soSe deben escribir las ecuaciones de equilibria -(2.34) y resolverlas tres inc6gnitas. En los tipos de problemas mils comnnes, esas _:.ri1as representan 1) las tres companentes de una sola fuerza 0 2) znitnd de tres fuerzas, cad a una con direcci6n conocida.
'Fotograffa 2.2 PU9Sto que la tension en los cuatro cables Que sostienen al contenedor de carga no se pueden encontrar con las tres ecuaciones (2.34). S9 puede obtener una relaci6n entre las tensianes consideranda 91equilibria del gancho.
Uri cllindro (II' 200 kg S{' SOStiCIK' por medio de dos cahles AB y AC q_ue se rran ell la parte ulta de unu parr-d vr-rtical. Olin Fnerzu horizontal P pe dicular a.Ia pared 10 ~o~L:ient' ell hi posici6:n mostrada, Determine la magnit.. dv P y la b-nsiou en eadu eahle.
mas
Tliagl'aDm de clle'l)O fibre. Se escoge e1 punto A como cuerpo Ii lisLe puulo est,i suil·to " cuatrn [uerzas. tres d lus cuales sun de rilltgnitud conoeida, Con la introrluccirin de Ius vecrores uniturios i. j yk, SI'! deseoropone I'lll..'T'I,OJ. n sus ('0111 POIlf'lIt['S e ,'('wtan!!;l Liar s, P W
= Pi
=
-lIIgj
-(200 kg)W.81 m/s2)j = -(1 962 N)j
(1)
Ell el caso tl<c T Ilf v T.u~, t', H~s[U'io determiuar primero las cOlllponen las magllltmk~s d" los \ edmt's AB y AG. Representando can AJ\8 el vector
[(I
lll.o...
do
10 tarp;o de AB, se eseribo
AB =
AAfJ 1'.11) ""-
=! l.~ lII)i
+ (10
III
l1I)j
(I) m)k
AB
= 12.862
= ()'~
COil
1:....8u2
= -O.09330i
+ O.7715j + O.6220k
1~IBA\.# = -O.U9330T!IJ)i
+ O.7775TAllj + O.6220T"Blr
Al reprcsentar
si-uiejantc AC
A .11: t'l vector unitario a 10 largo de AG. se escribe en fo
AG = 14.193 m
= -(
A.lf
L2 m)i -I (10 m)j - (W m)k
AU 14.1H3
=
HI
= -O.OH45Si + O.7(),~6j - O.1046k + O.7046T.<l.cj - O.7046T.... k c
T.le
T.\,·A.\C
-U.084.55'fAC:i
CondicioD de e(1uilibdu, }:F
Pucsto que A eshl en equillbrio se debe t~
=0 Iactorizandc
= O.
dt·
TUJ
+ TAr' + P + W
y
() eon If! sustitucinu
(IJ.
(2)
(:3) para las Iuersas
i, j Y It.,
( - OJI9;J;301'UI - n.OS4.'55T AC + P)i + 10.17751:-1.0 + ().7~16TA'; - 1 962 N)j + (O.6220I~\B - O.7046Ti\dk <\1hal'c'! 10_ coeflcientes dl' i, j Y k
i~Ulll'!s
=0
a Gem, so escrihen las tres ecuae,
III'S escalan-s que cxpresau qlle la SIJIlla de las ()ompollentes x, 'I y z de las filf: zas son, respecnv aiucnh- ignales a cern. ~F. = 0;
-:l.Fy
= 0:
= I):
:BF_
O.0B455T.1c + P = 0 + 0.7046T,,(: - 1962 N = 0 +0.(1220T,18 - O.7046']' .... = 0 c -O.093.jUT +0777.'5TNJ
Vi -
COli la snllJ ,jllu de estus ecnacioues
se obtiellf·
r.~IfJ =
I 402
T,IC
1238
[Ue se ama-
[Pperpen~ magnitud
R ,E:S:,Q L u C I 6 N D E P R'-a-_B-n: E~rvfA,!s,:j , .. _-_. N· _-F!-aR M A I N 0 E P _E._·t:r08:fEfN·~:r·E~: E' -_'. .• ,," .j: ~ ,-.':." _, '~', -~ ,__ -'"_ 'J
llerpo hbre, tgnitud desllpone eada
Anreriormenle se vio u cnanc 0 una partfcula e8M I'll ('qllilibrio. la resultante de las fu rzas que acttian sobre la misrna debe s(:'" igmJ a L'E'TU, En el CHSO del equilibria de una partfcula en el espacio trldlme11.~iontll,e}'-presar este hecho prop(trcionanl tres relaciones entre las fuerzas que acnian sabre la partfcula .. Estas relaclones s{' prrecleu ulilizar para deterrnmar tres inc6gnitas, que usunlrnente son In$ mngnituch-s de tres f'uHrzas, La soluci6n constara de los si?;Ulellte~ rasos: 1. Diblljor un diagrafIJo de CUEl'rpo lib're de In partfcula. Est!' dia)!l"'ilDlH muestra Ia partfcula y Ii todaslas fller/-t{S que ucninn sobre la rnlsma. En e] diagnullu se deben lndlcar tanto las magnitllCles de las Iuerzas oonooirlas, como euulquier angulI) 0 dimension que defina la direccidn de una fuerza, Cualquier magnitud 0 angulo dcsconocido debe ser denotadn pur Ull stmbolo apropiado, En el diagrama de cnerpo him' no se dobe lneluir mlormncion arlieional. 2. Descom,poner cada una de lU8fuer::~'8 en 8W~ c01'''PrmeJl'e.~ recta1~gu.lares, Con cl metodo utilizado en In seccion [Interim', pam cuda lnerza F se determiua el vector unitarin A, que define la direccion de dioha Iuorza y F se cxpresa como I product« de su magtlltuJ F y I'll vector unltario A, Asi se obtieue una expresion COli hi siguiciite [anna
(I)
rrponentes
l vector unl-
(2)
be en forma
(3) e debe tener
donde d, dx) d'J Yd~ sun dimensrones obtenidus a -partir del diagrama de Cllerpo lilm' de In particula. Si se couoce tanto In m.agnitlld conro la direceiou de una rlll .. ';a, eutoueus F es conoclda y Laexpresion ohtenida para F esl"ll totalmcnte df'Finlda; lit' otra Ii)nlHl, F es una de las tres incognitas a determinar, 3. Hacer igltnl a cera a In termltante 0 ffllr/la de lall JU(j'rzax que actllan sobre. la partlcula. Sa obtendra una ecuacion v ctorial que consta de t(~nnillos qUl' contienen los vectores unitarios i, j 0 k. Los terirrinos que conrienen d l1Ii~ITlU vector nnitario Se agrupar:m y dicho vector se factOlizru-a. Para que la ecuacion vectorial ~'pa ccrrecta, Sf' deben igualar a cero los coeflcientes de eada uno de Ius vectores uniturios. Estn proporcionard tres ccuaclones escalares que se puedcu resolver para rrn maximo de tres inc('igJlitas [problema resuelto 2.9),
,j,jyk.
fAclk= 0
;t:
tres ecuaciode las flier-
238N
59
60
Esta1ica de particulas
2.101 EI ensamblaje de apoyo que sa muestra en la figura esta . pernos al sitio en E, C Y D Y soporta en A una fuerza P dirigjda bacia las Iuerzas en los elementos AB,AC y AD estan dirigjdas a 10 largo de b mentes respeetivos y la fuerza ell el elemento AB es de 146 ,dete magnitud de P.
192.n:~
z
Figura P2.101 Y P2.102
220mm
2.102 El ensamhlaje de npoyo que se muestra en Ia figure est! pernos al sitio en B, C Y D Y soporta en A una Iuerza P chrigida hacia las fuerzas en los elementos AB, AC Y AD estrin dirigidas a 10 largo de mentes respectivos y P = 200 N, ealcule las fuerzas en los elementos, 2.103 Se emplean tres cables para amarrar al globe mostrado en ra. Si se sabe que la tension en el cable AB as de 60 lb, determine la fa ticaIl' que el globo ejeree en A. 2.104 Se emplean tres cables para amarrar al globo mostrado en ra, Si se sabe que la tension en eJ cable AC es de 100 lb, calcule la fueIZl cal P gl\e al globo ejerce en A. 2.105 La caja de madera gue se rnuestra en la figura P2.105}, 1'2 sastiene por medic detres cables. Si 58 saba (iDe 1.'1 tension en el cable ~ 3 kN, determine el peso de la caja de madera. 2.106 Para la caja de madera deJ problema 2.105, determine eJ , esta si se sabe que la tension en el cableAD es de .2.8kN. 2.107 Para Ia caja de madera del problema 2.105, determine esta si se sabe que Ia tension en el cableAC es de 2.4 kN.
Figura
P2.103 Y P2.1D4
eJ •
s
1)
Problemas
61
esrn fljo con ilclaahajo. Si ~ode los ele~ determine la
Figura P2.105y P2.108
Una (laja de madera de 750 kg esta sostenida par tres cables como __.,--",-,,~en figura. Determine Latension en cada cable. [a Una fuerza P se aplica sobre un cono unifonne como se muestra en rona esta sostenido par tres cuerdas ClJyas lfneas de acci6n pasan a Vl!rtice A. Se sabe qlle P = 0 y que la tension en la cuerda BE es de iewrmine el peso W del ceno.
192mm
~,
Una fuerza P se aplica sobre un oono uniforme como se muestra en ~ cono esta sostenido par tres cuerdas cllyas Iineas de aecion pasa,o a - ertice A. Si el cono pesa 1.6 lb, determine el rango de valores de P Ia cuerda CF esta tirante. Una terre de transmiSi6n se sostiene par media de tres alambres
Figura P2.109 y P2.110
mdos a una articulacion en A y se anclan mediante pemos en B, C Y
• en eJ alambre A13 as de .'3.6kN, calcule la fuerza vertical P ejerterre sabre In articulacion en A. a esta Eijo em: bacia abajo. rgo de los elentos, 000 en la figue la fuerza VeI-
<tdo en la figu-
la
Iuerza verfi-
x Figura P2.111 Y P2.112
nine el peso
~1ll1
terre de transmision se sostiene par media de Iresalambres a una. articulacion en A y se anclan mediante pernos en Bey en el alamhre AC es de 2.6 kN, determine lafnen:a vertical P torre sabre la articulacion en A.
62
Esta1:ioa de parncuras
2.113 Una placa rectangular esti'i. sosrenida pOl" tres cables, co muestra en III flgura. Si Ia tension en e1 cableAC es de 151b. calcule e! J:1'l la placa, 2.114 Una placa rectangular esta sostenida por tres cables, COIDO e ITa sn la figura. Si la tension en el ~.ableAD es de 120 Ib, determine el la placa, 2.115 Una placa circular horizontal con una masa de 28 kg esta . da por tres alambres que forman angulos de 30° CUll respecto a Ia vern encuentran unidos a un soporte en D. Calcule La tension en cada alarnbre
1)
Dimensioues en Figura P2.113 y P2.114
pulgaru.ts
y
Figura P2.11S
Rgura P2.116
2.116 Una terre de transmision se .sostiene por medio de tres aL que estan unidos a una articulacion en A y se anc'lan mediante pemus en D. Si la tone ejerce sabre In articulacton en A una fuerza vertical haeia 8 kN, determine Ia tension en cada alamhre, 2.117
ne Pam 1a piaca rectangular de los problemas 2.113 y 2.1] 4, en cads IIllD de los tres cables si se saba que e1 peso de la
la tension
de ISO lb. 2.118 Para eI cono del problema 2.110, determine el rango de P para los cuales ill cuerda DC erla tirante si P esta dirlgida en in dire 2.119 Una Iuerza P se aplioa sabre un conn unifonne, como se en In tlgura, el cono esta sostenido por tres cuerdas cuyas lmeas de acci a \;!-aves del vertice A. Si el 00110 pesa 2.4 Ib Y P = 0, calcule la tension cnerda, 2.120 Una fuerza P se aplica sobre III conn uniforme, como se en Ia fi!','ura. el cono esta. scstenido por tres cuerdas cuyas lfneas de a.cciJ:E. a traves del vertice A. Si el conn pesa 2.4 Ih Y P 0.1, determine In t
cadn cnerda, 2.121 Dos trabajadores descargan de un camion UIl contrapeso de hierro fundido coo dos euerdas y una rampa eon rcdlllos, Sabiendo mstante mostrado elcoarrapeso esta inmovil, determine la tension en
de
FiguraP2.119
y P2.120
i,
el peso de
como se
morrle:nadas de posici6n de los puntas A. B Y G son A(O, -0.5 m, 1 rn), O. m, 0) y G(0.7 m, 0.9 m, 0), respecliv:amente. Suponga que no hay ill rampa y el contrapeso. (Sugerencia: Pnesto que no hay mcdi6n, - ejereida. por Ia rampa sabre el conrrapeso debe ser perpendieular a esIj
Problemas
63
lD
se muesel peso de
22. Hesuelva el problema 2.121 pero suponga que un tercer trabajador fuerza P = -(180 N)i sobre el conb:apeso. _ 23 Una pleza de maquinaria de peso Wesm temporalmente sostenida Y ADE. EI cable ADE esta unido at anillo en A, pasa por ea.D y regresa al anlllo para unirse despues al soporte en E. Se sabe (lue lb, determine la tensi6n en cada cable. (Sugerel'lGia: La tension, as la todas las porciones del cable ADE.)
tesAB. AG
i suspendiertical y s
unbre,
FIgura P2.121
Ij
<,
/'
22.2
III
tres alambres nos enB, C, .acia arriba de
P2.123 Y P2.124
Figura P2.12S
114, deterrnide la placa
Una pieza de maquinaria de peso W esta temporalrnente sestenida AB, AG YADE. Eleable AiJE esta unido al anillo en A, pasa por eo D y regresa al anillo para unirse despues al soporte en E. Se sabe que en et cable AB es de 68tb, caloule: a) latension en AG, b) la tensi6n ~" c) el peso W. (Sugerenoia: La tension es Ia misma en todos los tramos ~ADE.)
24
eables
25 Un contenedor de peso W esta suspendido a partir de till aroen A. BAG pasa H traves del arc) y se fija a los soportes £jos B y C. Dos fuer= Pi Y Q = Qk se aplican en' e1 am pi;1ITl antaner al recipiente en J a pom lStracL,. Determine P y Q, si W == I 200 N. (Sugerend.a: La tension es en ambos tramos del cable BAG.) 26
rna se muestr'
Para el sistema del problema 2.125, determine W y P
sf
160 N.
le acci6n pas
e In tensi6n et,
Los collares A y B unidos par medio de un alambre de 1 ill de largo deshzarse llbremente sin Irioelon sabre las barras. Si una fuerza P = (680 en A, determine: a) Ia tension en e1 aIarnbre cuando y = 300 mm y ........,~,UJ_l de Ia fuerza Q requerida para mantener al sistema en equilibrio. 28 Resuelva 01 problema 2.127 supontendo que y = 550 tnm.
.peso de 200 _ !endo que en Il en eada cuer-
Figura P2.127
En e~t~ .caj?fbllo se estudi6 el ~fet:to defuenas: sahrE} ~artfc~ decic, sobre 'cuerpos de forma y tamafio trues que todas las '.CiJ.ue~eti1lUl sobre ellos se puede SQppner que se ap1:icao: en cii punto,
Resultante de dos fuerzas
Las fuerzas san cantidatl.eat)ectorial~ q'P.e S6 caractedzan poi di1'€cOiotl., y se-.:smnar aeuerdo eon la ley del paralBlogramo tfigurit 2.35). Ul· magni,tud receten de la resnltante B de dos fuerzas F y 'Q .se putiden deten narya. sea'grallcamente 0 par trlgoDometTfa.; utlliiandO sueesfvame la le:yde-lo;li eesenos y Ia ley de los senos (problema resuelto 2.1
'Ptt.nto:cIs apltta'CiOn, una fflogn#ud 'Y' una
Figura 2.35 A
Componentes de una fuerza
Cuslquier fuerza dada que a~e sohre una Pru:UculaP!Jsde P cornponerse en des 0 l'Qas Cf;)1tl,pcm'entlJp; e'i ®~i:t se:puedeTeemp fior dos 0 m4s-'fue(Zas que t;e~ga.J) el mismo ef¢;cto IlQ1;;re Ia p:!1rtfc: Se puede desoomponer una fucr-l.a F en .des cornpancn.tes F y Q dibujar un paralelograrno que tenga"g: F pot sit Cli~gdn~ e,ntOJ1 los compcnentes P y Q son representados WI los dos Jades adyac. tes del paralelogramo
gra:nCIiS 0 por trigonom!fb:1a:
(:8_~a 2.36) y se pueden deterritittar ya sec (secoi6p 2.6).
Figura 2.36
mente, se esorihe (seccion -2.71
Componentes rectangulares Vectores unitarios
Se dice que unaiUerza F se ha dMdido efi rlos:compotlentes • tting_u~ares_si £JIS-oompenen~es F~, sonperpe~~Ularese~tre yJ!1J se dirigen a 10.largo de-ios6Jes c00rdenade;; r;Qgu.ra:2.31). AI ~ cir los pectores uni'tanDs i.y J a 10 .largo de 16'S'ejes x X fJ. respe .
Fit
=E'J
y donde- F* y F~ san los ._~ponent6$ e$~alaire,Hle'.F. 'Es~'oo.InPO que pueden ser pGSItivOS 0 ne~ativos,· e c:ieflnen por las rem s
nes FlY = F cos
l________
j x
Figura 2.37
res
Fy = Ii sen
{J
Cuando se
za F,elinguJo
ner al escrfbir
dan las eomponentes rectartgulares Fco; y:FIf de una fu
8 que define Ia CUreedQl1 ~e: la -fuerzase:pp.ede obistan () = ~
F.~
(.2.9
La- rilllgW,tud F'de la fuersa ~ puede Qbtener- ~ resolver una de e(lUaaion'es (2:8) 0 al aplicare1 tem'6iIla de ~Ltago~ary ~cribir . .. - F = v'P~c+ ~ (2.10
64
Cuando tre~0 mtJsfiutrZtlS'(j~lil7l~*,es acttian sobre una Rartlcula, ccmponentes l'ectal'igulares aeSu..I6sUltarite R se pueden obtenet samar en forma algebraicalas coihponerites oorrespondieutes.OO las
dadas (seooi611"2.8). Setiene = :SFy
Repaso y resumen
del t::aprtulo 2
65
Resultante de varias fuerzas coplanares
~= LE~gnit1:J.d Y gtrecctQi) deR
Bit
(2.13).
sec ptred.e dete_~l'I:ar entf)-l'lJ,:es 1?Qt telasimilares ;il~ ecua~ion~ @.91 y{2.101 (pi'ohletna resiJ~:\f~,Z;3'},
Fuerzas en el espacio
tfci:t.kls, es
as ruerzas
t:na fngiza
, el
(I:l,i<;}l~P
.F'en un e'SpdlJto,mdtmtJnsfbru:il see puede descorrfpoeompcnentes rectaagulares F;:; Fy, y'F;:As'e;cci6n 2.12), AI sim- por mMlo de 8x_,Bit.! .9<'1 respectiv.amehte, los angulos que ,F con los .ejes z; y yz I,tlgur-a 2.3S) ,~e ti~1,e , ..
F~ = F.ees 9;.:
zan poi:':un
SUJl1itn
F'y = 1! ~~ 8y
1':;: =I!
COS
O~
'(2.19,
~tuc1 y.di~ b determi~yamente ~to 2.1).
de
truede'desI .
reeJi!Fl~
lSPyQal ~ ento:nces, ~sadya:ci61t[l' ya sea en
partI~li1a.
b)
0)
fnente.s reatS entre siy Ai introdurespeertva-
nos de fh. By y-8~ Sf\potwcen: Q9mo los OO~eM$ diretJt()'T:es (-di,~.-._- es) dc;da fu.~ria'F. Gonlam.troducci6n delos vedores-unita-
Cosenos directores
i: k a 10 largo de los eje,s 'G0Qrdenados; se .escribe
F =~~.i +'F~·+Fck
(2~2Q)-
i{2.7).
F =,£(60s 8J
+ cos lJyj + cos l1~k)
Byj + cos {Jzk.
()::
compo enlas relacio(2,8) Be una fuerp1J.eae pbte-
tiemuestra,(ffgQ.r'a 2.39)' qn~ E' esel preHtt.etb' de su magnitnd ector onl,tario X:;: cos,O",j,+ ppJ;
que la magmtud de J-. .~s~guMala uriidad, se tiene- que
eQSa·{1-.~.+ dQS:2'6y, +00_52
=: I
(2.24)
Cb.ando las (.'O:m]~r:teo.tes t~,~~gilla.tes<F%. Ell y E~de lJiQa:ue;rz;c\ f reionaa, la m~gmtutf:P de]a £qe,EZ1ise t;i.t).pu!!jIi:tra"al,:escribn-'
E = YF;- + o.:useruJSdireetores
F: + ~.
F ..
(2.18)
s- tiene
co'S{J
.>:
de E' 8ft :obn.enen a partir de las eenaeiones
Figura 2.39
CDS
(~.lO)
F =~ F
F" i1 -= -"--:
11
1'1 F". cos-~* =-1i
66
Estatioa de parlfculas
uande 1l11Z{fuel;zn F se deflll~, ~~ nn e.sp'a~io tri,dhilen.siOlla! de $11lllagnitud F de dos puntl)S.Af y NsoBte 5U Jinea de ciUtt secc16n 2,13), sus eompoueates reotangulares se £_lieden 0 • net delaslgdie:rtte manera: primero e expresa elvectof'MN que los p~mtos My N en tCnnino de SbS cm;q:ponentl:IS 4, d!J y'd:. (fig.
IIl¢uio
<
2.40).; se !'!scrlbe
UN = d"i , ~~Eo:6s:;e qetermi(la
+ dyI +' (1~
(2.26
eidndfl F,~
fJJ:vidir MN errtre.sn magtlitn(lMN
A.
ei vector nnitario A aI01l1t~, de Ia lmea de r~:
Jt.fN
MN = d(clt.t;1 + d'lJ + d ..14 ~,s:e tieue
F -"
1.
. (2.2-:-
J.Wcorchmdo que F es ignal al prodvctQ,@'Fy
()
F = FA
= ,d Cdxi + dyj +4~k)
reJnl~tQS
(2.28
po i're_~~es: escalares de E son, nispectliV".rilie-nte-,
Figura 2.40
de-''1o'C\~(l_rsa
dc.spreride (problemas
-2/1 y 2:8) ·que las co
Ii =
'cl
Fc4t
F = F~
y
'F = P'~
~ ,~,
Resultante de tuerzas en el espacio
clO" triclim.ensiQI1-al. las CQT'npelltmt~ t~4mgdlares de su res __ ultanh, .se pue den obterier al stnnar'&T1 fu:rr[H:lalgebciic:d~ G0fDP9nente..s }'re.!;poudientas de.Ias f.i:erzas (seed6!'12.14). Si\::Jie"e .
Cu<mao dos C1mlisfil(!~f!~ actJlftll sobmJ.'Lna purtfeula ~n.el
1\" =
ss,
R~= LE!)
1L =
!F~
(2.31
, til' de- l'e)1cjotle-£-S;ipH1lll$S' a. ,l,l'I.s. euneiones (2.]:'8) e blema reslteQt~2.): .
Equillbrlo de una particula
.Ut "1ll-ilgPitUd Y direcci6.n de R'seplleaeh
detenninar entonees
y (2.2$) M~ase .
a_
- , Sf>dice que urW.'j)urtkula e!lt{~ll e-qftilWrlo cuando la resul TIt;!toom; las fue:i:zas 9 ue a(;:tuitn sobre ella e~ ¢.EUt? (~-ecci6u 2. g). La tiell!~ entonces ,J?er:nul'Jle~ en r-epo 0 fsi otigin3h~¢EI se .encuITa en rep~o~ ose movera GOD:veldcldad Cml$;tanle en" u::n;1, lipea re-
f5i
se etltp1\tl':aba:originwmente
en,.Tl)0Viriliento)
lseeci€))l
2..10).
Dlagrama de cuerpo libre
Pl"Oblemq que se renflra a una parttcnl~ en e _ rut dia.gr,atna de auiJrfpa li.bre d paitidila q se m uestte todas 1i'l$ Jhe;J;'ZIls que actt1mf.Ji6bre ella (sen; 2.11). Sf s610 Q.cHiaJl tre.s foe~« cttpl(/,na-r~ sobre la p,u"lfcu la. se _ de dlbujar lin fri{ing1tlo de fwdt'Z(tS panl- atM, ar'que 1£1 pru:tfuw
Uhrio" pnmero sCi debler~dihujar'
Para.r
$dlv€'l' lllt
encuentra
ell equilibrf
t ~0 portrigonometria
teslI¢lio 2.4-). Si ran utilizar y resolver 1~ eouaotones d.e eqriilihno ~~ = 0
pM'll no IllflS dt"do~' il1(;ogni_l;a~' yeas probl, ( se incluyen mas do tr_fj,.~[((.erzfi8 co.p/rJfliJ[(Jq., se d r-
. Este trl.1.n$llJ0 se _p.ttt;:d:eres6!ver gru1i.car:
' :£Fy = 0 EstdS ecua.ci()-n6$.'pll den ser usadas pa.r.I no tlUIS de tl0S Jnc6
(prolJlemu resnelt() 2.G)t ' .
Equillbrlo en el espacio
Cuaudo unapartfcula es_m ell J.JqYilib:ril;) en (}l fi.~p:at;~()tiidime, naT" ($.eccj.\'io2.15), debetan usaf e y,resolvets J_P:S tte~ eeuarion
qllilt1,;lrio;
}1P.r = Estl\$ ecuactoll S
~}rir = 0
LPz_
pant no
:=
0
.
(2. de fies inc6 ... ·
pl1e(lll~SolVEtr
(veas" probt~tfla res l_eJcp '$JH.
mas
sionhl
EO!'
lea d e. ~lCc~
den obte~ q1Je.une
d; (tlgun1
(2,2.6)
aea
-de ilcEJ elemento BD ejerc sobre el elemento ABC una fuerza P diride la linea ED. Si P tiene UDacomponente horizontal de 300 lb,
.""'""....,... ........3J
Ia magnitud de Ia fuerza P y b) su componente vertical.
r1as
COl -
--_
Un recipiente de peso W esta suspendido del 301'0 A, al cual estan .:abies AC y AE. Una fuerza Pes apllcada al extreme F de lin tercer p1Sa por una polea en B y a traves del am A para finalmente conectarenD. Si se sabe que W = 1 000 N, determine la magnih"ld de P. ......... tension es la rnisrna en todos los trarnos del cable BRAD.) ; La
Q
(Z.29).
Figura P2.129
resultante; 9). La pare
eneuen-
linea recta .10), la en e9.~· Ub,-e. la (:!iecci6u a..sepJleartfenla s
ae
Figura P2 ..13(J Y P2.131
mifie:a'fiieD~
prQ151ema
('2.15)
• se debe-
Un recipienre de peso W 'e5M suspendido del am A, al cual estan cables AC y AE. Dna fuerza Pes aplicada al extreme F de un tercer par una pole a en R y a lraves del aro A para finalmente conectaren D. Si se sahe que la tension en el.cable AC es de 150 N, calcumagnitud de 1<1 fuerza F y b) el peso W del reetpiente. (Vease la del problema 2.130.) Dos cables se am arran juntos en C y S8 cargan como se muestra en Q = 60 Ib, determine la tension en a.) el cable AC, y b)
~c'QgttitQ.S
'di1tj#m-Sip-
i.se sahe que
aclaaes
(2.34)
de
33 Dos cables se amarran juntos en C y se cargan C01110 se muestra en ~ermine el rango de valores de Q para los cuales la tension en cuaicables no exceder! a 60 lb.
Q
Figura P2.132 y P2.133
jncqgnih
67
68
Es'..abca de parncutas
2.134 Una eonexsin.soldada esta en equilibria bajo In acci6n de las cuatrr fuerzas que se muestran en.la figura. Si F fI = B kN y F 8 = 16 kN. determme magnitudes de las restantes dos fuerzas. 2.135 Una conexi6n soldada esta en equilibria bajo la acci6n de las cuatrr fuerzas que se muestran en la figura. Se sabeque FA = 5 kN Y FD = 6 kN. cktermine las magnitudes de las restantes dos fuerzas. 2.136 E1 eollar A puede desllzarse
sin friccidn
sabre una barra hortzouta,
y esta oonectado a una carga de 50 lb, como se muestra en la flgura, Determue1<1 agnitud de Ja Iuerza P requerida para nranterrer a1 collar en equllibdo cum.m do a) x = 45 in, Y b) % = 15 in.
Figura P2.134 Y P2.135
p
A
20 in
Figura P2.136 Y P2.137
!I 280
UIUl
2.137 El collar A puede deslizarse sin fricci6n sabre una barn! horizons, y esta conectado a una carga de 50 lb. como se muestra en la figura. Determint la distancia x para la eual e1 collar se conserva en equilibrio cuando P = 48lh. 2.138 EI marco ABC esta parcialmente sostenido por el cable DBE, cual pasa sin: frieeion a traves de un aro en B. Si se ssbe que 1a tension en el c;;. ble es de 385 N, calcule las componentes de 13 fuerza ejerctda por el cable sehre el soporte en D. 2.139 E1 marco ABC esta parctalmente sostenldo por el cable DB_E. cual pasa SRT'fri<;!ci611 3 traves de uTI aro en B. Si se sabe que la tension en el ble as de 385 N, determine la magnnud y la direccton de la resultante de fuerzas ejercldas poi el cable en B. 2_140 Un tanque de acero es coloeado dentro de una excavaci6n. Date mine por trigonometria a) la magn:itud y la direcci6n de Ia fuersa mfnima P ~ ra la cualla resultante R, de las dos fuerzas aplicadas en A, es vertical y b) magnitud eorrespondiente de R.
FIgura P2. 138 Y P2.139
Figura P2.140
e las cuatro termine las
e las cuatro :6kN,de-
a horizontal Determine llihrio cuan-
2.C1 Can e1 empleo de software, deterrnme la IDagnitud y la direccion resnltante de n fuerzas coplanares aplleadas en el _punta A. Utilioo cite para resolver los problemas 2.32, 2.33, 2.34 Y 2.36.
Figura P2.C1
era horizontal a. Detemlinf> oP=481b.
:able DEE, el lSi on eo e1 caIf el cable S~
C2 Un trabajador planea subir una cubeta de pintura de 5 galones y 60 ~ peso atando una cuerda al andamio en A, y despues pasando la cuerda a del asa de la cubeta en B y par Ia polea en C; a), grafique la tensi6n en la " como una funci6n de la altura !I para 2 ft :s; y :s; 18 ft; b) evalue el plan ~ador. 2.C3 El collar A puede deslizarse libremente y sin friccidn sobre la barra tal que se muestra en la figura. El resorte conectado al collar tiene una te k y no sufre deformacion cuando el collar esta. dlrectarnente abajo del B. Exprese, en terminos de k y la distancia c, la magnitud de la fnerza P rida para mantener el equilibrio del sistema. Grafique P como una £uncl6n ]ID1llos valores dec entre 0 y 600 mm ouando, a) k := 2 Nlmm, b) k := 3 ~ Y c) k = 4 N/mm.
20ft
Figura P2.C2
::able DBE.
nsi6n en e1 ca-
rultante de la!;
vaci6n. Deter. minima F pivertical }' b) L
300 rum Figura P2.C4
r
Figura P2.C3
2.C4 Una carga P estasostenida por dos cables, como se muestra en la Determine, emplesndo software, la tensi6n en cada cable como una funP y e, Para los siguientes tres eonjunros de valores numerieos grafique
69
70
Est:!tic;; oe oarncu as
las tensiones para los valores de 8que se eneuentran desde '8) = f382 = 90 Ya partir de las gro1lcas determine a) el valor de (J para eI eual sian en los dos cables es mfnima y b) el valor correspondiente de la
0
1) a = 35°, f3 = 75", P = 1.6 kN 2) a = 50°, f3 = 30°, P = 2.4 kN 3) a = 40°, (3 60P, P = 1.0 kN
2.C5 Los cables AC y BC se amarran juntos en C y s cargan muestra en la Hgura. S8 sabe que P = 100 lb, a) exprese la tension en ble como una funci6n de 8; b) graflque la tensi6n en cada cable para 0 S 90°, Y c) a partir de la graBca obtentda en el Incise determine el valor mo de () para el cual ambos cables se mantienen en tension,
at
1150 II.
FIgura P2.C5
2.C6 Un recipiente de peso W esta sosrenido del aro A al emu estan nectados el cable 4.B, de 5.II1 de longitud y el resorte AC. La constants del
sorre es 01:' 1DO NJm, Y
2.C7 gitud
J'U
)011gitud
=
ferrsi6ll en el cable cuendo a) W
sin estimauenta es de 120 Ny b) W= 160 N.
3 m. Deterr'
= 80.3 ft que esta
Un aorobata se encuentra caminanrlo sabre una cuerda tensa de unida a los soportes A y B., los euales se encue
Figura
P2.C6
separados par una distancia, de 80 ft El pes.o combmado del acrobata y su garr aha de balance es de 200 Ib Y III, fnccion entre suszapatos y III,cuerda son eientes para prevenir el deslizamiento. Despreciando el peso y cualquier tipo deformacion elastica de la cuerda, mesa software para caleular la deflexi6n la tensi6n en las porciones AC y BC de la cuerda para los valores de x prendidos entre 0,5 ft y 40 ft usando incremento.') de'O.5 ft. De los resnltad obtenidos, determine a) 111, deflexi6n marima de la cuerda, b) III,tenston en la cuerda, yc) los valores minimos ds Ia tension en las_porciones AC y BC
mam
Ia cuerda.
80 ft
---------i
Figura P2.C7
1- 90° hasta II cual la tenle Ia tension.
2.JC8 La torre de tr:msmisi6n que se muestra en Ia 6g\ll'a e&ta sostenida .!ahles. los euales estao conectados a una articulacion en A y anclados en B, C yD. EI cable AD tiene 21 m de loagitud y la tension en el rnis. 2{)leN; 0) exprese las componentes x, y y z de Ia fuerza ejeroida par el AD sabre el ancla en D y los :rogulos (J.n 8y y B; correspondientes en ter~ f1; y b) graBque las componentes de la fuerza y los angulos 9£, By Y 8: Sa 5 600. Una torre eshl sostenida par los cables AB y LtC. Un trabajador amada de 12 ill d Jongitud a la torre en A y ejerce una fuerza cons tansobre la cuerda; a) exprese Ja tension en eada cable como una de 8, si In resultante de las tensiones en los cables yen la enema estA dl~_~-__,' ... abajo; y b) gt"a6que la tensien en oada cable como una funclon de (} S 8 5 180 Y a partir de la gnifica determine elrango de valOTI)S de () pa~ los cables permanecen en tension,
0 ,
Problemas de C41mputadora
71
rgan oomo se ;n en cada capara 0:5; 5 el valor mfni-
Figura P2.C8
::!lim
cuai estan censtante del reDetermine
x
Ia tensa de lanse sncuentran bata y sugarronerda son sunialquier tipo de la deflexi6n y ores de it com~los resultadn
Figura P2.eg
C10 Los oollares ~ y B estan eonectados por un alambre de 10 in de . ypueden deslizarse hbremente y-sin med6n sabre las barras, Si se apliruerza Q COIl una magJJitud de 251b sobre el collar B, como se muestra ~ determine la tension en el alambre y la magnitud correspondiente rza P requerida para mantener ill equillbno. Grafique la tension en el y la magnitud de la fuerza 'P para 0 :S x :5 5 in.
Figura P2.C10
......__, ea irulo se "demost (IrS;que las fue~s que e]ercen loa cuatr9 rept61cadores satire el USS Pasadena C"I!empl~J'Se POf una t~erza equiv.alel)fe elen;:ft:la por un Qqfb r~'l'olc8QOr.
3.1. INTRODUCCJON CUERPOS RiGIDOS:
SISTEMAS
3., 3..2 3.3 3.4 3.5
EQUIVALENTlS'S
DEFUERZAS Introduccl6n Fueaas intemas y externas Princlplo de transrrilSibilidad. Fuerzas equivaJentes Prot;luctovectorial dp dss' veotoree Productos vectoriales expresados en lennlnos de ccmponsntes rectangulares Momento de una fuerza con respeCto a un punto Teorerfla de. Varigllon Componentes rectangulares . del momento de una fuerza Producto escalar de dos Vablores Rroducto triple mixto de tres vectores Momento de una fOerza con respect~ a un eje dade) Momen1b de un par Pares equivalentes Adlei6n 0 suma de pares Los pares pueden representarsa por medlo de vectoras Descomposicion de una fuarza dada an una fue.rza en 0 y un par AeCluGci611de un sistema de fuerzas a una f4,1erzay un par Sistemas eq ivalentes de fuerzas Sistemas equipolentes de vec!Qres Otras reducciones de un sistema de fusrzas Reducci6n de un sistema de fuerzas a una lIave, de torsiOn Q torsor
En el capitulo anterior S6 supmo que carla uno de los cuerpos considerados podfa ser tratado como si fuera una sola particula. Sin embarga esto no siempre es posib1e y, en general, un cuerpo debe tratarse come Ia combination de varias parnculas. Tendra que tomarse en consideracion el tamafio del Cllerpo y tambien el heche de que las fuerzas acniar, sabre distintas partfculas y, par tanto, tienen distintos puntos de apneaAI definir que un cuerpo rigj,do as aquel que no se deforma, S8 supone que la mayorfa de los cuerpos eonsiderados en La rneeanica elemental son rigidos. Sin embargo, las estrueturas y maquinas reales nun son absolutamente ngidas y se deforman bajo 1a acci6n de las cargas que' acnian sobre ellas, A pesa:r de ello, par 10 general esas deformaciones son pequefias y no afectan las condiciones de equilibrio 0 de movimrento de la estruotnra en consideraci6n. No obstante, tales deformaeienes son Importanres en ]0 concemieute a la resistencia R la falia de las estructuras y estan consideradas en el estudio de la rnecaniea de materia-
cion.
3.6 3.7
3.8
3.9 3.10 3.11 3.12
le:s.
En este capitulo se estndiara el efecto de las fuerzas ejercidas sohre un cuerpo rfgido y se aprendera como reemplazar un sistema de fuerzas dado por un sistema equivalente mas simple. Este analisis estara basadsen la suposici6n fundamental de que el efecto de una fuerza dad. sobre un cue'Po rfgido permanece inalterado si dioha fuerza se mueve a 10 largo de su linea de Redan (prinu-ipio cis traflSmisibikdoil). Por tanto, las fuerzas que actiian sobre un cuerpo rigido pueden .representarse por ueotores desliz(lntes. como sa mencion6 en Ia seccion 2.3. Dos conceptos fundamentales asociados con el efeeto de una fnerza sabre un cuerpo dgido son el momenta de una foerw. con respecto II un punto (seecion 3.6) y el momentQ de una juerza con respecto a un t9. (seeci6n 3.11). Como Ia determinacion de estas cantidades involucra calcQlo de productos escalares y vectoriales de dos vectores, en este ca_pitulo se presentaran los aspectos fundamenta1es del algebra veeteria, aplicados a la soluei6n de problemas que involucran fuerzas que aonlan sabre cuerpos rfgidos. Otro conceptnque se presentara ell este capitulo es eI de un paT esto es, la combinaeion de dos fuerzas que tienen Ia misma rnagnitud lfueas de acoien, paralelas y sentidos opuestos (seccion 3.12). Como s vera, cualquier sistema de fuerzas que aetna sabre un CUBTpO rigido pue· de ser reemplazado por un sistema equivalente que consta de una fuerza que acnia en cierto punta, y un par; Este sistema basico reclbe e1 nombre de sistema jUer7..a",par. En 61 easo de fuerzas ooncurreutes, coplanares o paralelas, 131 sistema equivalente fuerza-par se puede reducir a una soIa fuerza, denominada la resultante del sistema, 0 a un solo par, Uamadr e1 par result.ante del sistema. 3.2. FUERZAS EXTER AS E INTERNAS Las fuerzas que aotiian sobre los ClieIpOS rfgidos se pueden dividir er dos grupos: 1. [uerzas enemas y 2. [uerza» interruls. 1. Las fo,erzas extemas representan la action que ejercen otros cuero pos sabre el cuerpo rigido en consideraclrin. Ellas son las responsables del comportamiento extemo del Cllerpo rlgido. Las fuerza, externas causan que el cuerpo se mueva 0 aseguran que Cstt permanezca en reposo. En e1 presente capitulo y en los capftulos 4 y 5 se conslderaran sdlo las fuerzas externas,
3.13
3,14 3.1S 3.16 3.17 3,1B 3.19 3.20 3.21
74
sideargo, :omo deraoMan
!.. Las [uerzas intemas son aquellas que mantienen nnidas las partfcnlas queconforman al cuerpo rfgido. S1 este esta constituido en su estructura par varias -partes, las fuerzas que mantienen unidas a diehas partes tambten se deflnen como Iuerzas. internas, Este grupo de fuerzas se estudiara en los capftulos 6 y 7. Comoejemplo de fuerzas externas, eonsiderense las fuerzas que aebre un camion desoompuesto que es arrastrado hacia delante par hombres mediante cuerdas unidas ala defensa delantera (figura _ Las fuerzas externas que aetiian sabre el cami6n se muestran en rama de cuerpo libre (figura 3.2). En primer lugar, se debe conet peso del cami6n. A pesar de que el peso representa el efeeto arraecion de la Tierra sobre cada una de las partfculas que constial carnion, este se puede representar por media de una sola fuerE} punta ck aplicaci6n de esta fuerza, esto es, el punto en el que fuerza, se define como el centro de gravedad del carnian. En el 5 se vera como se pueden, determinar los centros de gravedad. W hace que el camion se mueva hacia abajo. De heche, si no T Ia presencia del pisa, el peso podrfa ocasionar que el carnian iera hacia abajo, esto es, que cayera_ EI piso se opone ala caida -'n por medic de las reaociones Rj y B2- Estas fuerzas se ejere! piso sobre el carnian y, por tanto, dehen ser incluidas entre t::i~:lS externas que actrian sabre el cami6n. !DS hombres ejercen la :fuerza F al mar de la cuerda, EI punto de "'"-'-- ·'.u de F esta en la defensa delantera, La fuerza F tlende a haeer ............ - cami6n se mueva bacia delante en linea recta y, en realidad, 10lo puesto que no existe una fuerza externa que se oponga a movimiento. (Para simplificar, en este caso se ha despreeiado la ~:sf1ooo-ia a la rodadura.) Este movimiento del carnian hacia delante, eada lfnea recta mantiene su nrientacion Original (el plso del ca~ece horizontal y sus Iados S8 mantienen verticales), se cotraslaoion. Otras fuerzas podrian ooasionar que el camion se ~- __ en forma diferente. Por ejemplo, la fuerza ejereida par un gato ____..__.__, debajo del eje delantero podrta ocasionar que el camion rota......... ....... e su eje trasero, Este movimiento es una ratacf6n. Par tan--"'''''''''' d concluir que cada una de las Juer-o-s enemas que aetiian cuerpo rigido pueden ocasionar un movimiento de traslacion, o ambos; siempre y cuando dichas fuerzas no encuentren algu____ """"-'IU
3.3. Principlo de transmlsibilidad. Fuer.zas aqu tvaJemes
75
plicasua elenunea 'IS que eiones lmieneiones las es:ateria56
Figura 3.1
s sabre e fuerara ba~dada
mueve
Figura 3_2
,:Par 10 presen-
~.3. oa fUeTr;pectiJ a a un eje :uucra el este eavectorial e actuan
I
un
par
~agnitud Como se gjdo puesa fuerza, s.el.nom-
- -~n.
oplan.art5
a
una so-
'PIO DETRANSMIS'BIUDAD.
~ ......... ,·il1
FUERZAS EQUJVALENTES
r,l1runad
btroSCUeJ-
las re~onLas fuel"ZA! n que est los capftu-
d€ transmisibilidad establece que las condiciones de equimovimiento de un cuerpo ligido permaneceran inalteradas si F que acnia en WI punta dado deese cuerpo se reemplaza nerza _F' que tiene Ia misrna magnitud y direcci6n, pera que .zn punto distinto, siempre y cuando las dos Juerzas tengan la ~ de acGi6n (figma 3.3). Las dos fuerzas, F y F', tienen e1 missobre el cl,lerpo rigido y se dice que son equivalentes. Este 6fablece que Ia Bocian de una fnerza puede ser transJ1ll.tida a 511 linea de accion, 10 eual esta basado en Ia evidencia eKpepuede ser derivado a partir de las propiedades establecidas - en este libro y, par tanto, debe ser aceptadocomo una ley ~:e:::::E=.::tal. in embargo, como se vera en la secci6n 16.5, el principia ::::!C==-~-ibilidad puede ser derivado a partir del estudio de Ia dinaenerpos rigidos, pero dieho estudio requiere la intraducci6n "??mwta y tereera leyes de N wton y tam bien algunos otros con-
/
I
! I I
I
I
I I !
!
I
(
Figura 3_3
emas equJvaJleotes
ceptos. POI' consiguiente, el estudio de III estatica de los cuerpos rfgi: estani basado en los tres principios que se han presentado hasta aha que son: Ia ley del paralelogramo para la adicion de vectores, Ia prirr ra ley de Newton y el principia de transmisibilidad. En el capitulo 2 se menciono gue las fuerzas que actUan en una tfeula pueden ser representadas pOJ' vectores, los cuales tienen un p to de aphcaci6n bien deflnido, la particula misma y; POI' consiguHm' seran vectores fljos 0 adheridos. Sin embargo, en e1 caso de fuerzas actiian sabre un cuerpo ngido el punta de aplicacion de una fuerza es impertante, siempre y cuando su linea de acci6n permanezoa inalzrada. Por tanto, las fuerzas que acnian sabre nn cuerpa rigido deben representadas pOI una clase de vector diferente, el vector deslsza»: puesto que permite gue las fuerzas se deslicen a 10 largo de su linea aecion, Es importante sefialar qUB todas las propiedades que seran rivadas en las siguientes secciones para las fuerzas que acnian sabre cuerpo rigido seran, en general, validas pata cualquier sistema de tores deslizantes. Sin embargo para mantener la presentaci6n roM tuitiva, esta se Ilevara a cabo en terminus de fuerzas fisicas en Iugar las entidades rnatematicas conoeidas como vee tares desllzantes.
p'
Figura 3.4
En el ejernplo del camion, en primer lugar se observa que la lIn" de accion de la fuerza F es una lfnea horizontal que pasa a traves de defensas delantera y trasera del cami6n (figura 3.4). Por tanto, emplean el principio de transmisibilidad se puede reemplazar F pOI' una foer:. equipalente F' que <lema sobre Ia defsnsa trasera, En otras palabras, condiciones de movimiento y todas las deirras fuerzas externas que nian sobre el cami6n (W, Rl YR2) peTIDanecen inalteradas silos bomb empujan Ia defensa trasera en lugar de de la defensa delantera, El principia de transmisibilidad y el concepto de fuerzas equivaltm tes tienen limitaciones, Par ejemplo, oonsidere una barra cotta AB bre Ia cual aenian dos fuerzas asiales iguales y opuestas PI y P2 como muestra en la figura 3.5(1.. D acuerdo con el prindpio de transrmsibil, dad, 1a fuerza P2 se puede reemplazar por una fuerza p.z que tiene misma magmtud, misma direccion y misma linea de aceion pero que ar en A en lugar de en B (figura 3.5b). Las fuerzas PI y P~ que actil.at sobre la rnisma partfcula pueden sumarse de acuerda a las reglas del
mar
rna
B
a) A
b) B
A
c)
B
PI
Jl
ell
Figura 3..5
e)
rerpos rigidO!" ) hastaaho res, la prim€'III
en una parnen un punconsiguiente e fuerzas qur una fuerza III
anezca
inalte-
do deben ser
or deslizank
de su linea d que seran de'sobre u; lstema de vet.-
oan
tacion
mas
in-
as en Ingar antes.
como dichas fnerzas scm iguales y opnestas, su suma es lgual tanto, en terminos del eomp0rtamiento,e~'terno de la barra, de fuerzas original mostrado en la figura 3,5~esequivalente ~era fnerza algtllla que acme sobre 1:'1. barra (figura 3.Se). """"""'-.>IG.Le ahora las dos fuerzas igl1ales yopnestas P1 Y P2 que acIa harm AB, como se muestra en la figura 3.5d. La fuerza P2 reemplazada par una fuerza p~ que tiene la misma magnitud, ~n y misma linea de accien peru qne acnia en B en Ingar fign:ra 3.5e). Entonces, las fuerzas PI Y P pueden stnnarse y, ~, su suma es igual a cero (figu.ra 3.5f). De esta manera, desde vista de la mecanica de: los cuerpos dgidos.lossistemas ~~CL en 1a figura 3.5a y d SOil equivalentes, Sin embargo; results Juerzas internas y las dejormadione.s produeidas por Ios dos diferentes, La barra de Ia figura 3.50 est~: en tensiOn y, si :w totalidad ngida, se inerementara ligeraruente su longitud; la ngura 3.,5d esta en compresi6n y, si no es rigida, disminuira ..............kmgitud. De esta forma, aunque '81 principia de transmisihixde usar en forma libra. para determlnar las condiciones de ,.".,-_"'""""... de equilibrio de los cuerpos rigidos y para calcular las fuer.... 0 =-::::.....1<.." que actuan sobre los mismos, debe evitarse, 0 por 10 me::::::-.:.earse can cuidado, al momenta de determinar fuerzas Internas
3.4. Producto
vectorial
de dos vecIDn!s
Tl
eTO VECTORIAL DE DOS VECTORES
.::::;:=>~~
r mejor el efecto de una fuerza sobre un cuerpa dgido, a se introdacira un nuevo coneepto: el momento de una foer.
va que Ia a traves de
IIto, emplean
por una fuir: as palabras,
'XJ a. un punta. Este concepto se podra entender mas facilni aplicarse en una Canna mas efectiva si primero se agrega ~ .,mientas matematicas que se tienen disponibles, el producto de dos vectores. orlncto vectorial de dos vectores P y Q se define como el veesatisface las siguientes cOJidiciones:
ernas que
si 10,5 homb delantera. rzas equivaler racorta AD 1 Y P-2 como e transmisibiu Pi. que tiene bn pero que
s
1- linea de acci6n de V es perpendicular
Pya Q (figura 3.00).
magnitud
'J:
al plano que contiene
de V es el producto de las magnitudes de P y Q elseno del angulo () formado por P y Q (enya medida siem"'e debera ser menor a igual a 180"); por tanto, 58 tiene
(3.l)
~ direcci6n de V se ohtiene a partir de Ia regla de la mano de ... -h«: Cierre su mano derecha y mantengala de manera que sus esten doblados en el mismo sentido que la rotaeion a uaveS' angulo (J que haria al vector P colineal can el vector Q.; en• su dedo pulgar indicara ladireccion del vector V (figu3,6b). Observese que si P y Q no tienen un punta "deaplicaCi6n. ;;.Wn, estosprimero se dehen volver a dibujar a partir del mis ... punta. Se dice que los tres veetores P, Q yV ---tomadosen
a)
as reglas del
I
' P que ..""U"~.
b) Figura 3.6
orden-e- forman una triada a 'mano derecha.
B ~,
I'
mm~=J;l
que los ejesr, 11' Y 1; ntilizados en el capft:u.lo 2 forman un sistema de- ejes derecha y que los vectores unitarios i,j Y kdefinidos en III. eedlSn 2.12 fbrs
II lllilllO
mmgnnal
derecha,
7B
!1B fuelZaS
Cuerpos
ri!}idos'
sistamas
equivalentes
Como se menctono anterionnente.el vector V que satisface est tres condiciones (las cuales 10 definen en forma onica) S8 conoce co el produeto vectorial de P y Q y se representa por Ia expresicn raaremstica
(3.2 En virtud de la nctacion utilizada, el produoto vectorial de dos veeto P y Q tambien se conoee como el produeto cruz de P y Q. A partir de fa ecuaci6n (3.1) sa concluye que cuando dos veotores P y Q tienen la misma direccion, 0 direcciones opuestas, su producto vectorial es igual a cera. En el caso general, cuandoel angulo () formad, por los dos vectores no es 0" ill 1'80°, a 1a ecuacion (3.1) se Ie puede da: una interpretacion geometricasirnple: la magnitud V del produeto vettonal de P y Q es igualal area del paralelegramo que tiene como ladoa P yQ (6:gura 3.7). Por tanto, 131 producto vectorial P X Q peemanecc lnalterado si Q sa reemplaza par un vector Q' que sea coplanar a P y Y tal que la linea que une a las partes terminales de Q y Q' sea paralelaa P. As£, se escribe
V =.P
X
v
Q
Flgun 3.7
Q=P
Q~
(3.3
A partir de la tercera oondicion empleada para definir al product: vectorial V de P y Q, esto es, la oondicion que establece que P, Q Y deben formar una triacla a mana dsrecha, se concluye que los produetos veeroriales no son coemutauoo«, es deci.r, QX P no es igual a P x Q. De heche, se puede veriflcar faeilmente que QX Pesta cepresentado por el vector - V, quees igual y opuesto a V, entonoes se escribe y
QxP
--(P
Q)
(3.4.,
Ejeroplo. Calotilese el producto vectorial V' = P x Q cuando el vector tiene una magJJitud de 6 Yse sncuentra en el plano xx que forma un angulo d.. 30 con el.eje x )' el vector Q tiene una m.agmtud deA y se encuentra a 10 Iargo del eje x (Bgura 3.8). . A partir de III definicion del producto vectorial seeoneluye que el vector' debe sstar a 10 largo deleje y, tener la magnitnd
0
p
Figura 3.8
V "" PQ sen ()
(6)(4) sen 30° = 12
Y que debeestar
dirigido haeia arriba.
Se via que Ia propiedadeonmntativa 00 es aplicable en el caso de productos vectoriales. Ahora se puede preguntar si Ia propiedad distri· butiva se cumple, esto es, si La relaci6n
(3.5'
es valida. La respuesta es sf. Probablemente mnchos leetores estan dispuestos fit aceptar sin demostraci6n formal una respuesta que de manen intuitiva puede' parec£r oorrecta, Sin embargo, dado que toda la estrustura del algebra vectorial y de laestatica depende de la relacicn (3.5 se debe tamar el tiempo necesario para su deduccion. Sin perder la generalidad se puede suponer que Pesta dirigida am largo deleje y (figura 3.9a). Represeotando can Q Ia suma de Ql YQ~ se trazan perpendiculares a partir de los extremes terminales de Q, Q y Q2 hacia el plano zr, quedando definidos de esta forma los veotores Q', Qi. Q2' Se hara referencia a estos vectores, respeetivamente, come las proyeoeiones deeeuacion (3.3), se observe que el termmo del lade izquierdo de Laecuaoion (3.5) puede ser reemplazado por P x Q' y que
Вам также может понравиться
- The Psychology of Money: Timeless lessons on wealth, greed, and happinessОт EverandThe Psychology of Money: Timeless lessons on wealth, greed, and happinessРейтинг: 4.5 из 5 звезд4.5/5 (804)
- Orgullo y prejuicio: Clásicos de la literaturaОт EverandOrgullo y prejuicio: Clásicos de la literaturaРейтинг: 4.5 из 5 звезд4.5/5 (20517)
- Matar a un ruisenor (To Kill a Mockingbird - Spanish Edition)От EverandMatar a un ruisenor (To Kill a Mockingbird - Spanish Edition)Рейтинг: 4.5 из 5 звезд4.5/5 (23003)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4.5 из 5 звезд4.5/5 (20011)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (3271)
- The 7 Habits of Highly Effective People: 30th Anniversary EditionОт EverandThe 7 Habits of Highly Effective People: 30th Anniversary EditionРейтинг: 4.5 из 5 звезд4.5/5 (41)
- To Kill a Mockingbird \ Matar a un ruiseñor (Spanish edition)От EverandTo Kill a Mockingbird \ Matar a un ruiseñor (Spanish edition)Рейтинг: 4.5 из 5 звезд4.5/5 (22901)
- It Starts with Self-Compassion: A Practical Road MapОт EverandIt Starts with Self-Compassion: A Practical Road MapРейтинг: 4.5 из 5 звезд4.5/5 (188)
- Pride and Prejudice: Bestsellers and famous BooksОт EverandPride and Prejudice: Bestsellers and famous BooksРейтинг: 4.5 из 5 звезд4.5/5 (19653)
- The Courage to Be Disliked: The Japanese Phenomenon That Shows You How to Change Your Life and Achieve Real HappinessОт EverandThe Courage to Be Disliked: The Japanese Phenomenon That Shows You How to Change Your Life and Achieve Real HappinessРейтинг: 4 из 5 звезд4/5 (392)
- Los secretos de la mente millonaria: Cómo dominar el juego interior de la riquezaОт EverandLos secretos de la mente millonaria: Cómo dominar el juego interior de la riquezaРейтинг: 4.5 из 5 звезд4.5/5 (813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The 7 Habits of Highly Effective People: Infographics Edition: Powerful Lessons in Personal ChangeОт EverandThe 7 Habits of Highly Effective People: Infographics Edition: Powerful Lessons in Personal ChangeРейтинг: 4.5 из 5 звезд4.5/5 (142)
- The Picture of Dorian Gray: Classic Tales EditionОт EverandThe Picture of Dorian Gray: Classic Tales EditionРейтинг: 4 из 5 звезд4/5 (9756)
- El retrato de Dorian Gray: Clásicos de la literaturaОт EverandEl retrato de Dorian Gray: Clásicos de la literaturaРейтинг: 4 из 5 звезд4/5 (9416)