Вам также может понравиться
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- DS1 1Документ11 страницDS1 1Wissal GuilloulОценок пока нет
- SYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFДокумент40 страницSYS N°1 Tronçonneuse Automatique Grafcet Organigramme Systeme Minimum PDFJawher Salem50% (2)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОт EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОценок пока нет
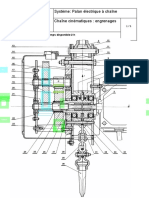
- TD Palan Électrique À Chaine1Документ4 страницыTD Palan Électrique À Chaine1xz4 zertoxОценок пока нет
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabОт EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabОценок пока нет
- Systeme de Preformage Du CartonДокумент11 страницSysteme de Preformage Du Cartonassiahakmi67% (3)
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsОт EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsОценок пока нет
- Train ÉpicycloïdalДокумент7 страницTrain ÉpicycloïdalTEBAO PRINCEОценок пока нет
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.От EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Оценок пока нет
- Ex 3 2steДокумент4 страницыEx 3 2steHicham MarzouqОценок пока нет
- Relevage Avant D Un Tracteur Agricole - Mécanique Appliquée - Probatoire MA-MFCMДокумент7 страницRelevage Avant D Un Tracteur Agricole - Mécanique Appliquée - Probatoire MA-MFCMalain gérard ETAMEОценок пока нет
- Exercice Etau Pour MVДокумент2 страницыExercice Etau Pour MVYoussef YouriОценок пока нет
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleДокумент6 страницContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriОценок пока нет
- Exemple FastДокумент1 страницаExemple Fastmejri merinОценок пока нет
- Théorie Mecanismes Etude de Cas-Maxpid - PPSXДокумент25 страницThéorie Mecanismes Etude de Cas-Maxpid - PPSXMerv BoudaОценок пока нет
- Correction Chapes Applications Dessin+de+definition Coupesimple 2012 2AS NetДокумент3 страницыCorrection Chapes Applications Dessin+de+definition Coupesimple 2012 2AS Netchaouch.najehОценок пока нет
- TD 17 Corrigé - Liaisons ÉquivalentesДокумент6 страницTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Correction TD 3 Schéma CinématiqueДокумент7 страницCorrection TD 3 Schéma CinématiqueShooting StarОценок пока нет
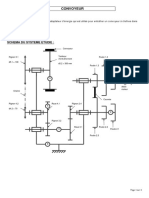
- Exercice ConvoyeurДокумент6 страницExercice ConvoyeurHajar AmalouОценок пока нет
- 02 Engrenage ConiqueДокумент2 страницы02 Engrenage Coniquechebbi wisseme100% (2)
- Chaines de Cotes - Exercices - 2Документ3 страницыChaines de Cotes - Exercices - 2Anas MohtadiОценок пока нет
- Presentation Picos18Документ22 страницыPresentation Picos18Saf Bes100% (1)
- Tableau Des Shemas MecaniquesДокумент1 страницаTableau Des Shemas MecaniquesntabОценок пока нет
- Bac GM 2006 Sept Metropole Lève Personne ORIOR PDFДокумент33 страницыBac GM 2006 Sept Metropole Lève Personne ORIOR PDFGeorges EllaОценок пока нет
- Perceuse Sidre AmdecДокумент22 страницыPerceuse Sidre Amdecpacom zanguéОценок пока нет
- Représentation D'un Produit FiniДокумент21 страницаReprésentation D'un Produit FiniMIMFS100% (2)
- TD Synthèse-TOUR SEMI-AUTOMATIQUEДокумент26 страницTD Synthèse-TOUR SEMI-AUTOMATIQUEAb HanaeОценок пока нет
- TP - TambMot Concep Complet A4Документ2 страницыTP - TambMot Concep Complet A4Tagne yvanОценок пока нет
- Calcul Des RoulementДокумент12 страницCalcul Des Roulementyousseftrimech4871Оценок пока нет
- t2 Con Elec2015 CadreuseДокумент6 страницt2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Документ6 страниц3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- Seie 4 Grafcet 3emeДокумент3 страницыSeie 4 Grafcet 3emeSoumeya MachtaОценок пока нет
- Mecanismes PDFДокумент34 страницыMecanismes PDFesloch50% (2)
- Controle Acc Emb FreinДокумент7 страницControle Acc Emb FreinkhayachiОценок пока нет
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleДокумент14 страницChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsОценок пока нет
- TDДокумент5 страницTDYassir Ez-znafry100% (1)
- Mini ProjetДокумент13 страницMini ProjetSaif GuesmiОценок пока нет
- DS1 Scie Sauteuse 2010Документ4 страницыDS1 Scie Sauteuse 2010mecaniquesti100% (1)
- U41 CorrigéДокумент11 страницU41 Corrigéanon_24380275% (4)
- Mecanisme de Transformation de Mouvement Systeme Vis EcrouДокумент5 страницMecanisme de Transformation de Mouvement Systeme Vis EcrouMhB SaAdОценок пока нет
- Les Douille À Billes PDFДокумент50 страницLes Douille À Billes PDFNadia DridiОценок пока нет
- TD Rev Mini Compresseur PDFДокумент5 страницTD Rev Mini Compresseur PDFHajar NhailaОценок пока нет
- Examen de Conception Mecanique 2009 CorrigeДокумент16 страницExamen de Conception Mecanique 2009 Corrigebhsbhs19Оценок пока нет
- Activité Semelles ConnectéesДокумент7 страницActivité Semelles Connectéesdahech hichemОценок пока нет
- Thème 1 - Poulie Redex-1Документ1 страницаThème 1 - Poulie Redex-1Anime forever 20160% (1)
- 17 TransformationДокумент10 страниц17 TransformationMohamed NaciriОценок пока нет
- TD 1Документ2 страницыTD 1hello 128Оценок пока нет
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFДокумент5 страницDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Technique CДокумент8 страницTechnique CAdnen BOUAZIZIОценок пока нет
- Sujet - Lève Personne - ÉlèveДокумент10 страницSujet - Lève Personne - ÉlèveremivsnОценок пока нет
- 6-Roues Et ChaînesДокумент5 страниц6-Roues Et ChaînesKamel BousninaОценок пока нет
- Exercice 1Документ4 страницыExercice 1EL-AARBAOUI ABDELJALIL0% (1)
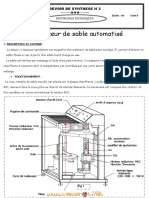
- Malaxeur de Sable AutomatiseДокумент9 страницMalaxeur de Sable AutomatiseHamada HamadaОценок пока нет
- TD Boite de CommandeДокумент2 страницыTD Boite de CommandeYoussef Trimech100% (1)
- Révision Engrenage 2020Документ15 страницRévision Engrenage 2020Yosr Ben SaidОценок пока нет
- Système Robo YoupiДокумент5 страницSystème Robo YoupiWalid Fattoum100% (2)
- Eléments de Transmission de MouvementДокумент3 страницыEléments de Transmission de MouvementgremdiОценок пока нет
- Corrig Examen Technologie de Construction 1GM Iset Nabeul 2009 PDFДокумент6 страницCorrig Examen Technologie de Construction 1GM Iset Nabeul 2009 PDFHanane Tounsi100% (1)
- Filetage Et Taraudage ExercicesДокумент4 страницыFiletage Et Taraudage ExercicesPierre-Eric AllierОценок пока нет
- AidememoirecourbesДокумент5 страницAidememoirecourbesPierre-Eric AllierОценок пока нет
- 981 Programme S2i Cpge AtsДокумент27 страниц981 Programme S2i Cpge AtsPierre-Eric AllierОценок пока нет
- Schrader PDFДокумент8 страницSchrader PDFPierre-Eric AllierОценок пока нет
- 2e Desse DusseДокумент5 страниц2e Desse DussePierre-Eric AllierОценок пока нет
- Mgen MSP Tableau-Des-Garanties-Sante ReferenceДокумент5 страницMgen MSP Tableau-Des-Garanties-Sante ReferencePierre-Eric AllierОценок пока нет
- Depp Rers 2019 - 1162516Документ411 страницDepp Rers 2019 - 1162516Pierre-Eric AllierОценок пока нет
- Chapitre 3 Ressources Réserves PlanificationДокумент10 страницChapitre 3 Ressources Réserves PlanificationAdlaneОценок пока нет
- Cevap AnahtarıДокумент1 страницаCevap AnahtarıVeliОценок пока нет
- Método de Violino - CajatiДокумент41 страницаMétodo de Violino - CajatiWalmir PaiãoОценок пока нет
- Programme Maths cm2Документ1 страницаProgramme Maths cm2gorguy100% (1)
- Secours en Cours de RouteДокумент32 страницыSecours en Cours de Routeantonio59100Оценок пока нет
- Formation - PDF - Robotique - Mécatronique PDFДокумент9 страницFormation - PDF - Robotique - Mécatronique PDFHachicha SaberОценок пока нет
- Brochure Nissan Urvan N350 15 PlacesДокумент14 страницBrochure Nissan Urvan N350 15 PlaceskoneОценок пока нет
- Examen Blanc Physique Chimie Bac DДокумент4 страницыExamen Blanc Physique Chimie Bac Dkouassi hermann ulrich koffi100% (1)
- CH1 (Introduction Au SI) PDFДокумент17 страницCH1 (Introduction Au SI) PDFEL OUAZZANI PRINTОценок пока нет
- World of Warcraft - Wrath of The Lich King - Arthas, My SonДокумент4 страницыWorld of Warcraft - Wrath of The Lich King - Arthas, My SonAdrian Angel LagrecaОценок пока нет
- DRAFT - Cours OCO - Part1Документ32 страницыDRAFT - Cours OCO - Part1Khennoune WissamОценок пока нет
- 5-Focales-Episode-2-Planification Et RégulationДокумент42 страницы5-Focales-Episode-2-Planification Et RégulationTaffyd MaertinsОценок пока нет
- Biochimie 08 - Réplication Et Réparation Des Erreurs AssociéesДокумент14 страницBiochimie 08 - Réplication Et Réparation Des Erreurs AssociéesNathan CohenОценок пока нет
- Examen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Документ7 страницExamen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Mar IemОценок пока нет
- MicrobiologieДокумент5 страницMicrobiologieInes FirasОценок пока нет
- EKIP360 PrestationsTarifications LFRДокумент30 страницEKIP360 PrestationsTarifications LFRtouzanimahdiОценок пока нет
- TP Controle Optimal PDFДокумент29 страницTP Controle Optimal PDFHamza El-houariОценок пока нет
- Serveur D'impression Sous Windows 2003Документ6 страницServeur D'impression Sous Windows 2003Issam BammouОценок пока нет
- Exercice 3Документ1 страницаExercice 3test lili100% (1)
- RapportДокумент125 страницRapportKawtar L AzaarОценок пока нет
- 1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Документ16 страниц1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Mohamed Hechmi JERIDIОценок пока нет
- Laboratoire Biolab Bamako - Recherche GoogleДокумент1 страницаLaboratoire Biolab Bamako - Recherche GoogleAlou CoulibalyОценок пока нет
- Manuel C2Документ140 страницManuel C2Daniel AndriamananaОценок пока нет
- Transformateurs MonophasésДокумент51 страницаTransformateurs MonophasésDo OuОценок пока нет
- Catalogue OKOFEN 2018 2019Документ68 страницCatalogue OKOFEN 2018 2019joseph38Оценок пока нет
- RIB CopieДокумент1 страницаRIB CopieAbdoulaye CisséОценок пока нет
- ProjetДокумент4 страницыProjetEya AwadiОценок пока нет
- ContexteДокумент2 страницыContextehibaouafi502Оценок пока нет
- Les Corriges Essai District Kanel Jan 2024 - 061004Документ8 страницLes Corriges Essai District Kanel Jan 2024 - 061004souleymanehousnaОценок пока нет
- Corrige Serie5Документ4 страницыCorrige Serie5Chef FatimaОценок пока нет
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.От EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Оценок пока нет
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfОт EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfОценок пока нет
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesОт EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesОценок пока нет
- La Conscience Et L'Univers Existent Sans Commencement Ni FinОт EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinОценок пока нет
- Du Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfОт EverandDu Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfОценок пока нет
- Les singularités comme limites ontologiques de la relativité généraleОт EverandLes singularités comme limites ontologiques de la relativité généraleОценок пока нет
- Les Êtres Vivants Dépendent De La Mécanique QuantiqueОт EverandLes Êtres Vivants Dépendent De La Mécanique QuantiqueОценок пока нет