Bens R2-D2 Electronic Diagram with
Shadow MD and Shady RC
v5.4 - 01/2020
www.printed-droid.com Update:
Added Gripper and Utility Arm Servos
Warning: I tried to do my best with verifiying that my connections are correct. But please don’t Added 6V Regulator info for all Servos
rely on this diagram to 100% and make sure that your connections are ok. Added Shady RC connections
Added links to Firm- & Software
When it comes to troubleshooting remove everything and add one item at a time. Verify Added small location diagram
everything. Add items until you run into trouble and then investigate the last added item! Added Switch Diagram for Marcduino Xbee/Mega
New PCB Section at the bottom
The latest diagrams and files can always be found here:
http://www.printed-droid.com/files/
Holoprojector 2 Holoprojector 2
Holoprojector 2
10 AWG Wires: Servo 1 Servo 2
RGB LED
HP2
50A Fuse to 50A Relais HS2V HS2H
Rear
50A Relais to 12-16V Fuse Block Rear PSI
5 Pin Cable
12-16V Fuse Block to 12V Regulator Arduino
Pro Mini
HP
Teeces
15
12V Regulator to 12V regulated Fuse Block RLD 2
5 Teeces – Rear Logic Display
12-16V Fuse Block to Syren 10 15 Rear
Dome
Bottom Panel
12-16V Fuse Block to Sabertooth 2x32A PSI
Servo 5
S5
12 AWG Wires: Rear
Syren 10 to Dome Motor Logic
Holoprojector 3
Holoprojector 3 Holoprojector 3
RGB LED
Sabertooth 2x32A to Feet Motors HP3
Servo 1 Servo 2
HS3V HS3H
Top
HP
14 AWG Wires 3
12V Regulated Fuse Block to Slipring/Dome
12V Regulated Fuse Block to Amplifier
Dome Dome
16 AWG Top Panel S7 S10 Top Panel Dome
HS1H HS3V HS3H HS2H HS2V
Wires to 5V Regulators Servo 7 Servo 10 S4 Bottom Panel
Servo 4
9
16 Channel PWM I2C Servo Board
HS1V
Only needed if Marcduino is not used
24
All Other Cables are Standard Servo or
Signal Wires ~AWG22 Arduino
Pro Mini
S8 S9
S3 9
Dome
There are wire connections like RLD to 5 Pin Cable S6 Bottom Panel
HP3
FLTHY Holoprojector Board
Rear PSI which are drawn with 1 Wire but Dome
Bottom Panel
Servo 3 HP2
Dome Dome
it’s a 5 wire connection Servo 6
Top Panel Top Panel S2
Servo 9 HP1 4 18
Servo 8 Dome
Bottom Panel
The Servos are: HP S1 Servo 2
Front
PSI
1
Dome
6x MG90 Holoprojector Servos Front
Logic Bottom Panel
Front
4x MG90 Dome Top Panel Servos 1
Logic
2
Servo 1
6x MG90 Dome Bottom Panel R2-D2s Dome components
2x MG90 CBI & DLP Door Servos 5V Regulator
2x MG966 Utility Arm Servos FLD FLD
Front PSI
Teeces – Front Logic Teeces – Front Logic
3x MG90 Interface Arm Servos Display Display
Teeces Holoprojector 1
Holoprojector 1 Holoprojector 1
15 15 RGB LED
3x MG90 Gripper Arm Servos 15
HP1
Servo 1 Servo 2
HS1V HS1H
Front
Instead of MG90 (metal gear) you can use
SG90 (standard gear)
S6 S7 S8 S9 S10 S1 S2 S3 S4 S5
HS1V HS1H HS3V HS3H HS2H HS2V 5
XBEE S6B
Marcduino Master 1 (XB2B-WFST-001)
4 on regulated XBEE Shield
Marcduino Slave Controlling Dome Servos connected to Smartphone App
Controlling Teeces Holoprojector System via WiFi
1 1 10 10 11
Please use only the Servo Signal wires (orange) And Holoprojector Servos Sound
Body Master Marcduino You have to choose between XBEE Control or PS
for connection to the Marcduino! Move Navigator control. Currently it’s not
possible to run both at the same time!
Atmega328P 9
Atmega328P 9 11 3 10
The GND and Positive wires should go to a
voltage regulator with stable 6V!!!
Common Ground
SAME WITH THE BODY SERVOS!!! 12V to 5V Regulator 12 Power Distribution Board
20
12V to 6V Regulator
25
Slipring Interface PCB
3
Links to Firm- & Softwares:
Slipring 24 Wires
Shadow MD: 4
https://astromech.net/droidwiki/SHADOW_MD
https://astromech.net/forums/showthread.php?21984-SHADOW-Marcduino-Update-Thread
Padawan Shadow:
https://astromech.net/droidwiki/PADAWAN_SHADOW Slipring Interface PCB
http://astromech.net/forums/showthread.php?19298-S-H-A-D-O-W-Padawan-based-mini-PS3-Controller 3
Boombox with integrated
https://gitlab.com/darren-blum/SHADOW Amplifier & Batteries
alternative
Shady RC dEvolution:
https://astromech.net/droidwiki/Shady_RC_dEvolution#Shady_RC_dEvolution_SHADOW_MD_Sketch
https://github.com/joymonkey/dEvolution 9 12 3 13 14
Atmega328P
MP3 Trigger Sound Amplifier Speaker
Marcduino:
Board
https://www.curiousmarc.com/r2-d2/marcduino-system 2
Sparkfun WIG-13720
https://astromech.net/forums/showthread.php?38382-Shady-RC-dEvolution-control Marcduino Master 2
https://astromech.net/forums/showthread.php?38288-JoyMonkey-s-R2-Build-Log-Episode-2/page2 Controlling Body Servos
CBIS DPLS
Teeces:
https://www.curiousmarc.com/r2-d2/teeces-dome-lights AWG 14
IA IA IA IA UA UA GA GA GA GA
SD S2 S1 S1 S2 S1 S2 SD
XBEE: SD SD
https://www.curiousmarc.com/r2-d2/marcduino-system/marcduino-boards/installing-the-wifi-radio
GS1 DPLS
IA IA GA GA
Utility Arm 1 Data Port Logics – DPL Panel Servo
S1 S2 S1 S2
16 AWG
CBIS
Charging Bay Indicator – CBI Panel Servo
GS2 16 AWG
Arduino Pro
Mini
Arduino
CBI Utility Arm 2
Charging Bay Indicator DPL
Breakout Board
Data Port Logics
16 16 AWG
AWG 12
GND
2 11 USB Host Shield with 17
Bluetooth Dongle
5 for connection with PS
Move Navigator
Syren 10
7 7 2 6
(Address 129) Arduino Mega 2560
Dome Motor 8 S1 0V Running the Shadow MD Software
6 Signal & PWR
7
10K Res istor
Needed only when dome
behaves erratically after 1
starting up)
6 8
16 AWG
Sabertooth 2x32A 16 AWG
12V to 5V Regulator
(Address 128) 20
The Relais are used to cut the power supply
completely. AWG 12 10A 10A
10 AWG
The Master Switch should close the Master Relay.
This will automatically Close the Feet Motor relais ON/OFF
10A 10A
and the Motors will have power abvailable. Switch
Common Ground
Charging
Charging P lug
12V regulated Circuit / PCB
If you turn your Droid off with the Master Switch, all Fuse Block
Relais should open and this allows to move the Droid 50A Relay 50A Relay
without generating electricity that goes back to the DPDT Switch
10 AWG
Sabertooth and could destroy it. GND GND 50A
50A
10 AWG
Fuse
21
If you want du move the Droid while still powered
RELAY 50A
on, you have to use the Feet Motor Switch to cut off
the power to the relais to avoid killing your
23 12V Regulator
Sabertooth!!!
E150 E150
Foot Motor Foot Motor
150W 24V 150W 24V Master
12V Battery 12V Battery
Switch
10A 30A
10 AWG
~18AH ~18AH
8 8 Lead Gel Lead Gel
15A
19 19
Battery Fuse Block
(only needed if you run a
setup over 12V otherwise run
everything with the fuse block
abvove)
22
HP1 – HP3 are the Holoprojector LEDs. The are connected to the FlthyHoloprojector Board
1 3 Wire Connection from Marcduino Master to Slave (Ground - 5V - Signal) HP1 to Pin Digital 2 Upper Panel
HP HP2 to Pin Digital3
HP3 to Pin Digital 4
1 Wire Connection from Arduino Mega Serial 3 (Tx Pin 14) to Marcduino This is a 3 wire connection, 5V, Signal, Ground
2
Body Master (Rx)
HS are the Holoprojector Servos. The Number is for which Holoprojector and V means
HS PSI Holoprojector 1
3 Wire Connection (Signal - Ground - 5V) from Marcduino Output MP3/ Vertical movement and H is Horizontal Movement.
3
Teeces to MP3 Trigger Input 5V FTDI (RX - 5V/VCC - Ground)
Best way to connect them is via the Marcduino Slave:
3 Wire I2C Connection Marcduino SDA to FlthyHP D, Marcduino SCL to FlthyHP C
HS1H to Pin 2
4 & Marcduino Ground to FlthyHP G HS1V to Pin 1 FLD Lower Panel
HS2H to Pin 4
HS2V to Pin 3
3 Wire Connection (Signal - 5V - Ground) from Marcduino Slave MP3/Teeces to the HS3H to Pin 6
5 Teeces Arduino (RX - 5V - Ground) HS3V to Pin 5
Upper Utility
Alternative connect them to the I2C PWM Board: Arm
Just a USB Host Shield sitting on the Mega 2560 with a Class 1 CSR 4.0 USB Bluetooth Lower Utility
6 HS1H to PWM 0
Dongle inserted Arm
HS1V to PWM 1
HS2H to PWM 2
DPL Panel
2 Wire Signal Connection Arduino Serial2 (Tx2 Pin 16) to Syren10 S1 & Arduino GND to HS2V to PWM 3
7
Syren 0v HS3H to PWM 4
DPL (behind panel)
HS3V to PWM 5 CBI Panel
2 Wire Signal Connection from:
8 Syren10 S1 (Mega Pin 16) to Sabertooth S1 This is a standard 3 wire Servo connection, 5V, Signal, Ground
Syren10 0v (Arduino GND) to Sabertooth 0v Interface Arm Door CBI (behind panel)
Serial Lines are chained from Syren! behind is the Interface
S1-S10 are the Dome Panel Servos
S They are connected to the Dome Master Marcduino. Corresponding to the Pins on the Arm which needs 2 servos Gripper Arm Door
6 Wire I2C Connection from
Marcduino. behind is the Gripper Arm
9 I2C Servo Breakout Pins (G OE C D Vcc V+) to PWM Board (GND OE SCL SDA Vcc V+)
only necessary if the Holoprojector servos are not connected to the Slave Marcduino For example S1 goes to Pin 1, S2 to Pin 2 and so on needs 2 servos
This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect servo power
4 Wire Connection from Marcduino Interconnect to XBEE Shield (Ground 5V DOUT DIN) to a stable 6V source
10 You have to choose between XBEE Control or PS Move Navigator control. Currently it’s not
possible to run both at the same time!
UA are the Utility Arm Servos. UA1 is the upper Utility Arm, UA2 is the lower
11 1 Wire Connection from Arduino Mega Serial 1 (Tx Pin 18) to Marcduino Dome Master (Rx)
UtilityArm. They are connected to the Body Master Marcduino.
UAS
But be aware you have to modify the Marcduino Firmware for Body Servos!
CBIS is the CBI Door Servo. The Servo is connected to the Body Marcduino Pin 3 This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect
CBIS This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect servo power to a stable 6V source
servo power to a stable 6V source
DPLS is the DPL Door Servo. The Servo is connected to the Body Marcduino Pin 4
DPLS This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect IAS are the Gripper Arm Servos. IASD is the Gripper Arm Door Servo, IAS1 is the 1st
servo power to a stable 6V source Servo for the Gripper Arm and IAS2 is the second Gripper Arm Servo.
IAS They are connected to the Body Master Marcduino. Holoprojector 3
But be aware you have to modify the Marcduino Firmware for Body Servos!
Number refering to Electronics BOM and the PCB This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect
xxx Pictures below
servo power to a stable 6V source Holoprojector 2
GAS are the Gripper Arm Servos. GASD is the Gripper Arm Door Servo, GAS1 is the
PSI
1st Servo for the Gripper Arm and GAS2 is the second Gripper Arm Servo.
GAS They are connected to the Body Master Marcduino. RLD
Electronics BOM:
But be aware you have to modify the Marcduino Firmware for Body Servos!
This is a standard 3 wire Servo connection, 5V, Signal, Ground but please connect
https://docs.google.com/spreadsheets/d/ servo power to a stable 6V source
1EhwsvKlSnYgEmawRqciR4KCTsDLp68p6iLbMrdwMvOA/edit?usp=sharing
Those are almost all PCBs listet in the Diagram above
9 1
Marcduino 1.5
http://printed-droid.com/knowledge-base/marcduino/
12
Sparkfun MP3 Trigger Board
http://printed-droid.com/knowledge-base/sparkfun-mp3-trigger- 11
board/
Arduino Mega 2560, USB Host Shield, Class 1 CSR 4.0 USB Bluetooth Dongle
http://printed-droid.com/knowledge-base/shadow-md-droid-control-system/
3
R-Series 24 Wire Slipring Adapter Board
http://printed-droid.com/knowledge-base/r-series-24-wire-slip-ring-
interface/ 24
16 Channel PWM Servo Board
http://printed-droid.com/knowledge-base/flthyhps-flthy-holo-
projectors/
XBEE S6B (XB2B-WFST-001)
Board (WRL-11373)
with 6dB Antenna
http://printed-droid.com/knowledge-base/xbee-system/
5
6
Syren 10 (to prevent self spinning dome insert a 10k Resistor
Holoprojector (7bit RGB Led, at the back with 3-
between S1 and 0V)
Sabertooth 2x32A (Daisychained from Syren 10) 6 wires slipring - 12.5mm diameter)
Syren10 needs to be used in Packetized Serial Mode (Address 129)
Sabertooth needs to be used in Serial Mode (Address 128) http://printed-droid.com/knowledge-base/flthyhps-flthy-
Dip Switch 1, 2 & 4 are off, Dip Switch 3. 5 & 6 are on holo-projectors/
Dip Switch 1 & 2 are off, Dip Switch 3-6 are on
http://printed-droid.com/knowledge-base/syren-10/ http://printed-droid.com/knowledge-base/sabertooth-2x32a/
4
3 Wire Slip Ring 24 Wire Slip Ring
18 18 http://printed-droid.com/knowledge-base/slip-rings/ http://printed-droid.com/knowledge-base/slip-rings/
Flthy Holoprojector Board with Arduino Arduino Pro Mini Breakoutboard with Arduino
Pro Mini 328P 5V 16Hz Pro Mini 328P 5V 16Hz
(also usable for CBI-DPL) (for CBI-DPL or Teeces PSI only)
http://printed-droid.com/knowledge-base/arduino-
http://printed-droid.com/knowledge-base/flthyhps-flthy-holo-projectors/
pro-mini-breakoutboard/
Fuse Block
http://printed-droid.com/knowledge-base/fuse-block/
20
LM2596 Voltage Regulator
http://printed-droid.com/knowledge-base/voltage-regulator/
15
17
16
Teeces (RLD – FLD – PSI) CBI – Charging Bay Indicators
http://printed-droid.com/knowledge-base/teeces-v3-dome-lighting-system/
http://printed-droid.com/knowledge-base/charging-bay-indicators/ DPL – Dataport Logics
http://printed-droid.com/knowledge-base/data-port-logics/
The connections with PCB pictures:
If the Pad is soldered the Master will
provide power to the Slave
But please power the Slave seperately
to avoid servo jitter!
3 Wire Connection between
Master/Slave Marcduino
Signal from Master goes to RX
If you want to use the
Slave, 5V to 5V, GND to GND
Smartphoneapp you’ll need the
XBEE. If you want to trigger
Sounds, Sequences etc. via
controller you have to connect to
the Arduino Mega (See below 5V <-> VCC
left). GND <-> GND
DOUT <-> RX
DIN <-> TX
Detailed Info on
Power Bottom
Power
Pad soldered powers Pad soldered sends
the Teeces without power to MP3
problems Trigger Board
3 Wire connection from Master
to MP3 Trigger (via Slipring and
Marcduino Dome Master (you’ll need the „reversed firmware“ Slipring Adapter)
Marcduino Dome Slave (Slave Firmware) Signal from Marcduino goes to RX
for the printed droid) on MP3 Trigger, 5V to 5V and
1-6 are for the Holoprojector 3 Wire Connection (Signal - 5V - Ground) GND to GND
Servos from Marcduino Slave MP3/Teeces to the (solder the solder pad to power
Teeces Arduino (RX - 5V - Ground) 1-10 are the Dome Panel Servos via Marcduino. If you power the
5V and Ground only needed if you power Dome Panel 1 to Pin 1 etc. MP3 trigger from the body you
This is a standard 3 wire Servo only need the Signal to RX wire)
connection, 5V, Signal, Ground
the Teeces via the Marcduino! XBEE S6B (XB2B-WFST-001) on Board (WRL-11373)
This is a standard 3 wire Servo with 6dB Antenna
connection, 5V, Signal, Ground
Use the capacitors only on C3 & C4!
Speakerconnector
(direct to Speaker with
integrated AMP or to AMP
SD Card with Sounds and then to Speaker)
X X X X
Alternate Powerinput if you only
run 1 wire from the Marcduino
X X X X
Marcduino SDA pin to FlthyHP D pin
Marcduino SCL pin to FlthyHP C pin 6 Wire I2C Connection from I2C Servo Breakout Pins (G OE C D Vcc
Power Marcduino Ground (-) pin to FlthyHP G pin
Don’t use RAW input! Stable 5V only! V+) to PWM Board (GND OE SCL SDA Vcc V+) only necessary if the
Only needed if not
powered via Holoprojector servos are not connected to the Slave Marcduino
Marcduino!
0 = Front Servo 1
Power 1 = Front Servo 2
2 = Rear Servo 1
3 = Rear Servo 2
4 = Top Servo 1
5 = Top Servo 2
16 Ch PWM Board for Holo Servos IC2 Address 64
Digital 2 is Front HP Only needed if you’re not using Marcduino!
Digital 3 is Rear HP Flthy Holo Board
Digital 4 is Top HP
X X Upper Front Logic Display (FLD)
Rear PSI
Connector for Holos not needed when you use
the Flthy Holosystem!
Holoprojector RGB LED
(at the back is a slipring)
Lower Front Logic Display (FLD)
The CBI & DPL aren’t controlled by
CBI & DPL Wiring
the Arduino or a Marcduino. They’re
standalone. Power
I recommend to use the Pro Mini
Breakout Board, it’s smaller and has
an dedicated Input on PCB bottom for
Voltage meassurement (displayed via
3 LEDs on CBI)
Alternative the Flthy Holo Board
This 3 Leds show
the Voltage status
+ -
Battery In
X X for Voltage
Measurement
Front PSI
Connector for Holos not needed when you use
the Flthy Holosystem! Pro Mini Breakout Board (recommended)
If you want to use the Smartphoneapp you’ll CBI
need the XBEE (see above right). If you want to
trigger Sounds, Sequences etc. via controller Alternative to the Mini Breakout
you have to connect to the The Marcduino Board
Dome Master Rx to Pin 18 (Tx sometimes Signal Pin 11 to L
labeled different) from the Arduino Mega. Signal Pin 12 to C
Signal Pin 13 to D
And 5v to 5v, Gnd to Gnd
Power DPL
Flthy Holo Board
Power
Arduino Mega 2560 with USB Host Shield and Bluetooth Dongle Marcduino Body Master
Pads need to be soldered for Running the Shadow MD Software
providing the needed 5v for
the USB Dingle 1 is Upper Gripper Arm Servo
2 is Lower Gripper Arm Servo
3 is CBI Door Servo
4 is DPL Door Servo
12-24V in
S1-S6 Signal Lines
Dome-Body Slipring Wiring
for Dome Motor
S1: Marcduino Dome Master to
MP3 Trigger
S2: Arduino Mega to Marcduino
Dome Master
DC Dome Motor
S3-S6: for future use
Syren 10 (to prevent self spinning dome insert a 10k Resistor -
between S1 and 0V)
Syren10 needs to be used in Packetized Serial Mode (Address 129) +
Dip Switch 1&2 are off, Dip Switch 3-6 are on
12V OUT
12-24V in
Foot Motor 2 Foot Motor 1
Dip Switch 1, 2 & 4 are off
for Foot Motors
You need 4 circuits:
Dip Switch 3, 5 & 6 are on
12+
Ground
Marcduino Dome Master to MP3 Trigger
Arduino Mega (Body) to Marcduino Dome
Master
The Slip Ring wires are soldered to
a female DB25 connector (which is
plugged into the male connectors With 24 wires available i use:
from the PCB) 9 wires for 12V+
9 wires for Ground
IMPORTANT! The slip ring wires
6 wires on S1-S6 (signal line)
are very thin, so be careful with
Stable 5V for them during soldering.
Marcduinos, Those 6 S-wires are used for:
Teeces etc.
S1 Marcduino to MP3
S2 Arduino Mega to Marcduino
S3 – S6 for future use
Dip Switch 1&2 are off
Dip Switch 3-6 are on
Sabertooth 2x32A (Daisychained from Syren 10)
Sabertooth needs to be used in Serial Mode (Address 128)
Dip Switch 1&2 are off, Dip Switch 3-6 are on S1-S6 Signal Lines
S1: Marcduino Dome Master to
MP3 Trigger +
S2: Arduino Mega to Marcduino -
Dome Master
S3-S6: for future use 12V IN
R-Series 24 Wire Slipring Adapter Board
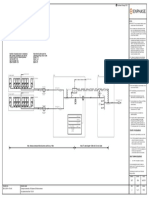
Switching between MarcduinoApp and Shadow MD A DPDT toggle switch has 6 terminals. Terminals 3 and 4 represent the toggle switch.
These terminals receive the power necessary to drive the loads on terminals 1 and 5
and 2 and 6. Terminal 3 can flip between terminals 1 and 5. Terminal 4 can flip
between terminals 2 and 6.
A DPDT switch has 2 input switches which can each connect to one of 2 terminals.
Therefore, it can control 4 different circuits, or devices, with 2 switches.
To use Marcduino you can use the Controller to trigger sequences etc. or you can use the Smartphone App.
Currently it’s not possible to use both simultaniously!
DPDT Switch diagram
So you have to connect either the Arduino Mega to the Marcduino Dome Master
or the XBEE.
If you want to use the Smartphoneapp you’ll need the XBEE. If you want to trigger Sounds, Sequences etc. via controller you have to
connect to the The Marcduino Dome Master Rx to Pin 18 (Tx sometimes labeled different) from the Arduino Mega.
But with a little trick you don’t need to unplug one and plug in the other.
Just install a simple DPDT (Double Pole Double Throw) Switch.
A DPDT switch is a awitch that has 2 inputs and 4 outputs. So each input has 2 corresponding outputs that it can connect to.
So all you have to do is to install the DPDT that it switches between the Mega Signal and the Xbee Signal (and disconnects th e 5V from
the Xbee)
Those 4 Pins are
the 4 pins from
the detailed
picture above
XBEE S6B (XB2B-WFST-001) on Board (WRL-
11373) with 6dB Antenna
Marcduino Dome Master
Arduino Mega 2560 with USB Host Shield and Bluetooth Dongle
Running the Shadow MD Software
Using Shady RC & Marcduino
Joymonkey developed a new Firmware for the Master Arduino that could handle RC Input with Shadow MD.
The Shady RC Sketch will allow to control foot and dome motors with the Turnigy Evolution and the Marcduinos are triggered via the
SmartphoneApp (so the Xbee Setup is needed)
You’ll need the Turnigy Evolution RC Controller with the iA6C Receiver (mostly included).
TGY-iA6C Receiver
Fly SKY FS-iA10B Receiver
Turnigy Evolution
The AIO Sketch:
The Standard Sketch should run fine with some modifications:
Disconnect the Line between the Arduino Mega 2569 (Body) and the Dome Master Marcduino (and Body Master)
Which means the Body Marcduino is obsolete from now on, but there’s another solution to trigger him (i’m working on it!)
The USB Shield and Bluetooth Dongle is also not needed!
You can also trigger the MP3s from the Turnigy Evolution. Please read the Astromech Wiki entry:
https://astromech.net/droidwiki/Shady_RC_dEvolution
Normal Sabertooth/Syren Chain
iBus (S.BUS) goes to Pin 15 of the Arduino Mega
GND goes to any Arduino Mega Ground Pin
VCC goes to the Ardiuono Mega 5V Pin
The Sketch says:
On the TGY-iA6C receiver there is a little 2-pin JST port labeled B-DET (i guess battery detection).
TGY-iA6C Receiver
You can connect your main battery here and it‘s voltage will be sent to the transmitter and displayed there.
However, the B-DET is limited to 4S battery (16.8V) input.
If you're using a 6S battery (25.2V), it would damage the receiver, so I connect my main battery
using a simple voltage divider using two 10K resistors.
Then I tell the Evolution Transmitter to pretend that we've got a 3S battery instead.
Right Stick Ch.1 = Steering
Arduino Mega 2560 Running the Shady RC with AIO Sketch (remove the USB Host Shield and Bluetooth Dongle)
Right Stick Ch.2 = Throttle
Left Stick Ch.3 = Autodome frequency, or Volume (when knob VrA is fully clockwise)
Left Stick Ch.4 = Dome Rotation
SwB (left) Ch.5 = Set Max Drive Speed *** Factory default for Ch.5 is both SwB & SwC)
SwA (mid) Ch.6 = Foot Drive Enable (up=off, down=on)
VrA (knob) Ch.7 = sound/function selector
SwC (right) Ch.8 = Trigger Sounds *** Factory default for Ch.8 is disabled!
The MD Sketch:
The Marcduino Sketch is different.
Currently iBus triggers only Ch. 5-8
The Syren 10 and Sabertooth are directly connected to the classic servo outputs
Via CH1, Ch2 & Ch4 (Ch3 is currently unused)
So the classic daisy chain for them must be disconnected and rewired to the receiver.
The USB Shield and Bluetooth Dongle is also not needed!
More information on the Astromech Wiki:
https://astromech.net/droidwiki/Shady_RC_dEvolution
Rewire the traditional Syren10/
Marcduino connection like
Sabertooth Chain to the
in the „big“ wiring above
Tranbsmitter!!!
X
CH1 CH2 CH3 CH4 CH5 CH6 CH7 CH8 CH9 CH10 VCC
S V+ G
S V+ G
S V+ G
G V+ S
iBus
S V+ G
S V+ G
S V+ G
S V+ G
G V+ S
Sens
S V+ G
S V+ G
S V+ G
S V+ G
Fly SKY FS-iA10B Receiver
The FS-iA10B can‘t readout voltage directly. You need to use the
Sample Picture of 6CH (CH7-10 have same pinout but FS-CVT01 Voltage Sensor for FlySky Telemetry sensor
(C Series is important – labeled blue)
aren’t needed)
Arduino Mega 2560 Running the Shady RC with MD Sketch (remove the USB Host Shield and Bluetooth Dongle)
Right Stick Ch.1 = Steering wired directly to Sabertooth or other motor controller -not used by the sketch
Right Stick Ch.2 = Throttle wired directly to Sabertooth or other motor controller -not used by the sketch
Left Stick Ch.3 = Not currently used 12-24V in
Foot Motor 2 Foot Motor 1
for Foot Motors
Left Stick Ch.4 = Dome Rotation wired directly to Syren -not used by sketch
SwB (left) Ch.5 = MarcDuino Command execute (down) and Reset/stop sequence (UP)
Middle switch position is stand by Factory default for Ch.5 is both SwB & SwC)
SwA (mid) Ch.6 = Channel 8 sound toggle. When SwA is in the UP position SwC toggles volume up and down
VrA (knob) Ch.7 = MarcDuino Command selector Turning the dial allows selection of up to 13 Marcduino commands/sequences and S wC (right)
Ch.8 = Custom Function Trigger. Used to trigger additional functions Factory default for Ch.8 is disabled!
12-24V in
for Dome Motor
The 5V wire is an alternative
powersource for the DC Dome Motor
Receiver (if not powered
extern or via the Arduino)
Syren 10 (to prevent self spinning dome insert a 10k Resistor
between S1 and 0V)
S1 goes to CH4 Signal
0V / GND to CH4 GND
Sabertooth 2x32A
S1 goes to CH2 Signal 1-OFF 2-ON 3-ON
S2 goes to CH1 Signal 4-ON 5-ON 6-ON
0V / GND goes to CH1 GND Please check Dip Settings
(5V could power the receiver) for your own setup!
Вам также может понравиться
- Aptra: Advance XFS Product OverviewДокумент48 страницAptra: Advance XFS Product OverviewJalal Zahidur RahmanОценок пока нет
- Legrand Distribution SystemДокумент52 страницыLegrand Distribution SystemdekosokolОценок пока нет
- Product & Solutions Portfolio: Fortifying Your Network InfrastructureДокумент45 страницProduct & Solutions Portfolio: Fortifying Your Network Infrastructurerence_kioskОценок пока нет
- Data ScienceДокумент1 страницаData Sciencerupesh karanamОценок пока нет
- Provision CatalogoДокумент1 страницаProvision CatalogoRodrigo AcОценок пока нет
- CTIPC Series IP Camera User Manual Ctronics Pro Simplified Version CompressedДокумент1 страницаCTIPC Series IP Camera User Manual Ctronics Pro Simplified Version CompressedJai Sri HariОценок пока нет
- PDLD Y10038 02 7600 Sinamics Family Fold Up Poster en 144 InternДокумент7 страницPDLD Y10038 02 7600 Sinamics Family Fold Up Poster en 144 InternVictor BonifazОценок пока нет
- Installation Overview D9/D16 MG MCC: MCC Electrical Connection Box AUX, Emergency and CombinedДокумент2 страницыInstallation Overview D9/D16 MG MCC: MCC Electrical Connection Box AUX, Emergency and CombinedKareem TosonОценок пока нет
- OptimДокумент2 страницыOptimjese 08Оценок пока нет
- CC-Link & CC-Link - LT CatalogДокумент119 страницCC-Link & CC-Link - LT Catalogkhonghohenk6Оценок пока нет
- ReCycle 2.1 InfoДокумент1 страницаReCycle 2.1 Infojavier navarroОценок пока нет
- The SD WAN Buyers MindmapДокумент1 страницаThe SD WAN Buyers Mindmaptomix2Оценок пока нет
- Symmetra LX Physical Installation Guide Rack-Mount UPSДокумент2 страницыSymmetra LX Physical Installation Guide Rack-Mount UPSgreg_williams7012Оценок пока нет
- Volvo MCC InstallationДокумент1 страницаVolvo MCC InstallationTran Hoai AnОценок пока нет
- QRD3654 A Quick Start Guide 4Документ2 страницыQRD3654 A Quick Start Guide 4Flaviovictorbonato BonatoОценок пока нет
- CR-10, 12, 15 Quick Installation GuideДокумент2 страницыCR-10, 12, 15 Quick Installation GuideRandyОценок пока нет
- UD19517B-E Baseline New Plastice Case Hybrid Security Control-Panel QSG V1.3 20201210Документ4 страницыUD19517B-E Baseline New Plastice Case Hybrid Security Control-Panel QSG V1.3 20201210Ed SeguelОценок пока нет
- R03 C07B01 IKP 01 GF SDW AR 10005 - Comments1Документ1 страницаR03 C07B01 IKP 01 GF SDW AR 10005 - Comments1Eleazar SacloloОценок пока нет
- Progress ChartДокумент1 страницаProgress Chartjohn SagzОценок пока нет
- Name of Trainess: Institution: Training ScheduleДокумент1 страницаName of Trainess: Institution: Training Schedulejohn SagzОценок пока нет
- Newcontroller Userguide 12-1-12Документ1 страницаNewcontroller Userguide 12-1-12carlinhosacОценок пока нет
- AGN 035 - Overload and Fault ProtectionДокумент10 страницAGN 035 - Overload and Fault ProtectionariwibowoОценок пока нет
- 8948 Rev1 Milton Wsg001 Eng Sh5 1Документ1 страница8948 Rev1 Milton Wsg001 Eng Sh5 1tshepo hlakudiОценок пока нет
- AT&S Standard Scheme - Unigear ZS1 D1440Документ8 страницAT&S Standard Scheme - Unigear ZS1 D1440zhang1988Оценок пока нет
- Schematic Diagram: 7-1 Circuit DescriptionДокумент8 страницSchematic Diagram: 7-1 Circuit Descriptionoppa BaruОценок пока нет
- AMC Moreau Town Center Alarm DetectionДокумент1 страницаAMC Moreau Town Center Alarm DetectionAnonymous MDkp0hnb3lОценок пока нет
- AWS Periodic TableДокумент1 страницаAWS Periodic Tabledouglas.dvferreiraОценок пока нет
- PRS Overview Poster PDFДокумент1 страницаPRS Overview Poster PDFOlivier KNОценок пока нет
- Poster Incose Is 2016 1Документ1 страницаPoster Incose Is 2016 1bobblejotОценок пока нет
- UWL - Spec - Sheets - DMX - 2021 - v1.6Документ2 страницыUWL - Spec - Sheets - DMX - 2021 - v1.6rico sinagaОценок пока нет
- 918 - AR - (44) Level 1 & 2 Floorr MarkingsДокумент1 страница918 - AR - (44) Level 1 & 2 Floorr MarkingsJelson RumuarОценок пока нет
- Sae As 81820-4B 2007 (En)Документ4 страницыSae As 81820-4B 2007 (En)Oh No PotatoОценок пока нет
- VVD SDDC 5 0 X PosterДокумент1 страницаVVD SDDC 5 0 X Postersener3eОценок пока нет
- VVD SDDC 5 1 X PosterДокумент1 страницаVVD SDDC 5 1 X PostertodeneyeОценок пока нет
- 918 - AR - (01) LoweR Ground General ArrangementДокумент1 страница918 - AR - (01) LoweR Ground General ArrangementJelson RumuarОценок пока нет
- Typical Enphase SLD 3ph ResiДокумент1 страницаTypical Enphase SLD 3ph Resielectromec technologyОценок пока нет
- EN Installation Poster MCC Đ - D19 MHДокумент2 страницыEN Installation Poster MCC Đ - D19 MHGiangDoОценок пока нет
- Captura de Pantalla 2023-10-05 A La(s) 8.32.40 P.M.Документ1 страницаCaptura de Pantalla 2023-10-05 A La(s) 8.32.40 P.M.hannasophiacuteОценок пока нет
- Eachine Q90C User ManualДокумент2 страницыEachine Q90C User ManualRicoh EscanerОценок пока нет
- 315C CFTДокумент4 страницы315C CFTelectricista85Оценок пока нет
- Layout Final Rehabilitation - Coordinates: Detailed Engineering Design - Sidoarjo Old LandfillДокумент1 страницаLayout Final Rehabilitation - Coordinates: Detailed Engineering Design - Sidoarjo Old Landfillyonie prasetyoОценок пока нет
- PLUMBINGДокумент5 страницPLUMBINGvillanuevarey14Оценок пока нет
- MRF100401 De2Документ126 страницMRF100401 De2Petros TsenesОценок пока нет
- 60421-WWL-XX-02-DR-E-62001: Small Power & Data Notes LegendДокумент1 страница60421-WWL-XX-02-DR-E-62001: Small Power & Data Notes LegendSohail SurveОценок пока нет
- ZTE MF61 Quick GuideДокумент2 страницыZTE MF61 Quick GuideBurt QuisidoОценок пока нет
- Central Finance 1709Документ38 страницCentral Finance 1709Romain DepОценок пока нет
- AWS Cloud PracticionerДокумент1 страницаAWS Cloud PracticionerwejsiОценок пока нет
- Enclosure - CR 10-X CR 12-X CR 15-X - Quick Installation GuideДокумент2 страницыEnclosure - CR 10-X CR 12-X CR 15-X - Quick Installation Guideleo clОценок пока нет
- Copy and Paste To RDP: May 2013 MLM Hosted SolutionsДокумент2 страницыCopy and Paste To RDP: May 2013 MLM Hosted SolutionsSoumya GuptaОценок пока нет
- Digium Failover Appliances Application BriefДокумент3 страницыDigium Failover Appliances Application Briefmaple4VOIPОценок пока нет
- Micro Data Center Layout, Cable Management, Grounding/Bonding, Power and IDДокумент2 страницыMicro Data Center Layout, Cable Management, Grounding/Bonding, Power and IDhgfdfg jhhОценок пока нет
- NetworkPortDiagram Vsphere 6x Refer0Документ9 страницNetworkPortDiagram Vsphere 6x Refer0yves bombaОценок пока нет
- Poster 5g Testing Done Right v1d enДокумент2 страницыPoster 5g Testing Done Right v1d ensellabiОценок пока нет
- More, Accessible Ways To Obtain Equipment Statuses: Monitor in Real-Time and Connect With DatabaseДокумент3 страницыMore, Accessible Ways To Obtain Equipment Statuses: Monitor in Real-Time and Connect With DatabaseHajnal GorgenyiОценок пока нет
- Smart Doorbell: User ManualДокумент1 страницаSmart Doorbell: User ManualCristhianОценок пока нет
- Quick Installation Guide For FI9826P (V2) V1.7 PDFДокумент2 страницыQuick Installation Guide For FI9826P (V2) V1.7 PDFvsalapОценок пока нет
- DLAPLUS2 Adapter Family Users Manual 090515Документ83 страницыDLAPLUS2 Adapter Family Users Manual 090515Nolberto CastilloОценок пока нет
- 8 631 CA 740302 Mfy NDT Rev00a - Elevation at Row 1Документ3 страницы8 631 CA 740302 Mfy NDT Rev00a - Elevation at Row 1Vinu MadhavanОценок пока нет
- TP Precision Wireless Mouse 0b40432Документ2 страницыTP Precision Wireless Mouse 0b40432Gunawan BondangОценок пока нет
- VapR XR Dissolvable Frac Plug Operations ManualДокумент12 страницVapR XR Dissolvable Frac Plug Operations ManualGermanPersicoОценок пока нет
- AP RACING CP9660 SpecsДокумент2 страницыAP RACING CP9660 SpecsKyriakos AnagnostouОценок пока нет
- Features: DIESEL Engine Fire Pump ControllersДокумент12 страницFeatures: DIESEL Engine Fire Pump ControllersvielmanwОценок пока нет
- Tips MIRC - Dialogs (PaiRC)Документ8 страницTips MIRC - Dialogs (PaiRC)svasilichОценок пока нет
- To Create Va-Ve Notification: Use T. Code Iqs1: Select ZV Type Notification From Dropdown List and EnterДокумент23 страницыTo Create Va-Ve Notification: Use T. Code Iqs1: Select ZV Type Notification From Dropdown List and EnterIndresh ChandraОценок пока нет
- CLAD Sample Exam-1Документ20 страницCLAD Sample Exam-1Jie Wei100% (1)
- Oferta Cartuse Compatibile Si Consumabile - Copiprint BrasovДокумент6 страницOferta Cartuse Compatibile Si Consumabile - Copiprint BrasovCopiprint Com SRL - BrasovОценок пока нет
- Riserbond App GuideДокумент44 страницыRiserbond App GuidefiskitОценок пока нет
- MPEG-2 Long GoP Vs AVC Comp-StrategiesДокумент22 страницыMPEG-2 Long GoP Vs AVC Comp-Strategiessathis_nskОценок пока нет
- TMS320C24x ('C24x)Документ474 страницыTMS320C24x ('C24x)mspd200350% (2)
- Track Link Assembly D475Документ1 страницаTrack Link Assembly D475Marco BacianОценок пока нет
- WD Drive Utilities For Windows Release Notes 2.0.0.44Документ3 страницыWD Drive Utilities For Windows Release Notes 2.0.0.44Binary CodeОценок пока нет
- STC 60020Документ9 страницSTC 60020darrylcarvalhoОценок пока нет
- International Debit Card Leaflet EnglishДокумент4 страницыInternational Debit Card Leaflet EnglishAkterRokyОценок пока нет
- Laser PrinterДокумент2 страницыLaser PrinterDaniela de La Hoz0% (1)
- AG150 250 Part 3Документ6 страницAG150 250 Part 3aritmeticsОценок пока нет
- ThinkPad E470 SpecsДокумент1 страницаThinkPad E470 Specsmuhammad tirta agustaОценок пока нет
- Wide Swath Bathymetry and Side Scan Sonar Geoswath 4Документ2 страницыWide Swath Bathymetry and Side Scan Sonar Geoswath 4Mihai DragomirОценок пока нет
- S N M P:: Notice # 0007Документ3 страницыS N M P:: Notice # 0007Lê Quốc KhánhОценок пока нет
- An Experimental Study of The Uses of Ternary Logic in Digital Computers Friichtenicht 1964)Документ194 страницыAn Experimental Study of The Uses of Ternary Logic in Digital Computers Friichtenicht 1964)pikymailОценок пока нет
- Chap 4 Floating Point IssuesДокумент5 страницChap 4 Floating Point IssuesMadhava Reddy YeruvaОценок пока нет
- CMMT AS 3A QUICKGUIDE - 2019 05 - 8100291g1Документ2 страницыCMMT AS 3A QUICKGUIDE - 2019 05 - 8100291g1NhanОценок пока нет
- ELEQ4606 Field Technician Networking and Storage v1!04!01 2019Документ36 страницELEQ4606 Field Technician Networking and Storage v1!04!01 2019Dhoopa DeviОценок пока нет
- LAYOUT L03/L04.: Selection Table Doses Astro Fb-BelgioДокумент12 страницLAYOUT L03/L04.: Selection Table Doses Astro Fb-BelgioforfazeОценок пока нет
- PICAXE - WikiwandДокумент7 страницPICAXE - WikiwandLuis VerenzuelaОценок пока нет
- D28491 B2 Dewalt T1 PBДокумент3 страницыD28491 B2 Dewalt T1 PBenriqueacm19Оценок пока нет
- Embedded System ApplicationsДокумент153 страницыEmbedded System ApplicationsJhoole100% (1)
- Drone Obstacle Avoidance CodeДокумент5 страницDrone Obstacle Avoidance CodeAjay YadavОценок пока нет
- Akira CT21NI9r CH 3S10 (Z ST92195, STV2248, STRG6653) - Adj 164Документ7 страницAkira CT21NI9r CH 3S10 (Z ST92195, STV2248, STRG6653) - Adj 164Amadou FallОценок пока нет
- York Start-Up Check List - Air Handling UnitsДокумент2 страницыYork Start-Up Check List - Air Handling UnitsBen MusimaneОценок пока нет