Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Highway Lighting Developers Guide and Equipment SpecificationДокумент50 страницHighway Lighting Developers Guide and Equipment SpecificationHakimHabibiОценок пока нет
- List HargaДокумент1 страницаList HargaHakimHabibiОценок пока нет
- Creative CV Hakim HabibiДокумент1 страницаCreative CV Hakim HabibiHakimHabibiОценок пока нет
- L F1 F2 F3 dF1/dP1 dF2/dP2 dF3/dP3Документ9 страницL F1 F2 F3 dF1/dP1 dF2/dP2 dF3/dP3HakimHabibiОценок пока нет
- Soon To A: Reliability of Optical Fibres Impact On Cable DesignДокумент6 страницSoon To A: Reliability of Optical Fibres Impact On Cable DesignHakimHabibiОценок пока нет
- STC-GO (KA5S (V) - GK200C) Technical Data Sheet: Material SpecificationДокумент2 страницыSTC-GO (KA5S (V) - GK200C) Technical Data Sheet: Material SpecificationHakimHabibiОценок пока нет
- STC-GO (KA5S (V) - GK200C) Technical Data Sheet: Material SpecificationДокумент2 страницыSTC-GO (KA5S (V) - GK200C) Technical Data Sheet: Material SpecificationHakimHabibiОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Al Jaber Et Al. - 2012 - Renewables 2012 Global Status Report PDFДокумент176 страницAl Jaber Et Al. - 2012 - Renewables 2012 Global Status Report PDFDaniel Ortíz EsquivelОценок пока нет
- DG Set SpecsДокумент57 страницDG Set SpecsGautam LohiaОценок пока нет
- Electric Energy Power & Household CircuitsДокумент15 страницElectric Energy Power & Household CircuitsAman LilaniОценок пока нет
- Embraco Emi55herДокумент5 страницEmbraco Emi55herJoel MelendezОценок пока нет
- LM2500 Course PDFДокумент86 страницLM2500 Course PDFKorichiKarim100% (9)
- Dimensions of Energy ManagementДокумент7 страницDimensions of Energy ManagementjayantabhbasuОценок пока нет
- High Volt Electric Defstan PDFДокумент26 страницHigh Volt Electric Defstan PDFMuhammad Jawwad Moeen AhmedОценок пока нет
- Rooftop Solar System Maintenance GuideДокумент8 страницRooftop Solar System Maintenance GuidesaketОценок пока нет
- General Physics Module 12Документ22 страницыGeneral Physics Module 12kristiankyut1590Оценок пока нет
- Performance and Mathematical Model of Three-Phase Three-Winding Transformer Used in 2 Electric RailwayДокумент11 страницPerformance and Mathematical Model of Three-Phase Three-Winding Transformer Used in 2 Electric RailwayGokul VenugopalОценок пока нет
- 2019-11-20 - UD Trucks - Biodiesel FAMEДокумент3 страницы2019-11-20 - UD Trucks - Biodiesel FAMEMaintenance PlannerОценок пока нет
- Introduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceДокумент20 страницIntroduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceGanmarie DuqueОценок пока нет
- Power Harvesting For Smart Sensor Networks in Monitoring Water Distribution SystemДокумент3 страницыPower Harvesting For Smart Sensor Networks in Monitoring Water Distribution SystemdikshaОценок пока нет
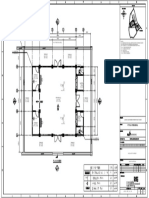
- LGE001-MEC-LAY-005 HVAC Layout - MosqueДокумент1 страницаLGE001-MEC-LAY-005 HVAC Layout - MosqueRemmo ArdianОценок пока нет
- Motor Parameters 03Документ2 страницыMotor Parameters 03Miguel eОценок пока нет
- 540w Axitec Germany Brand Solar PV Panels ModulesДокумент2 страницы540w Axitec Germany Brand Solar PV Panels Modulessalem jawherОценок пока нет
- Molecular Energy Levels NotesДокумент5 страницMolecular Energy Levels Notesskrim2Оценок пока нет
- 3x1Kw Geysers 3000 100% 3000: 1KW For Each Square or Part of A 100 SquareДокумент2 страницы3x1Kw Geysers 3000 100% 3000: 1KW For Each Square or Part of A 100 SquareShuaibSolomonОценок пока нет
- Engineering Thermodynamics: Unit - IvДокумент23 страницыEngineering Thermodynamics: Unit - IvSanthosh SaОценок пока нет
- Test Instructions For Potential TransformerДокумент4 страницыTest Instructions For Potential TransformerthegemishereОценок пока нет
- Ishy CktsДокумент3 страницыIshy Cktsrhedmish0% (1)
- Sia-B: Overcurrent and Earth Fault Protection Relay For Secondary DistributionДокумент5 страницSia-B: Overcurrent and Earth Fault Protection Relay For Secondary DistributionPaulo RebeloОценок пока нет
- Power Generation Through Speed Breakers - ppt2Документ17 страницPower Generation Through Speed Breakers - ppt2bishwakalpa dwibedyОценок пока нет
- 1 - An Adaptive Overcurrent Protection Scheme For Distribution NetworksДокумент8 страниц1 - An Adaptive Overcurrent Protection Scheme For Distribution Networkswillian teixeira olivioОценок пока нет
- Session of 5th December 1956: Jacques Lacan - Seminar IVДокумент15 страницSession of 5th December 1956: Jacques Lacan - Seminar IVvladaalisterОценок пока нет
- CASE STUDY - Waste To Energy 4MWДокумент2 страницыCASE STUDY - Waste To Energy 4MWAli BariОценок пока нет
- Course OutlineДокумент14 страницCourse OutlineTony SparkОценок пока нет
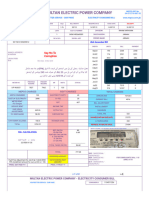
- Mepco Online BillДокумент2 страницыMepco Online BillMukhtar AhmedОценок пока нет
- AcДокумент5 страницAcDeepak GoyalОценок пока нет
- Paper Battery-Murugappa Polytechnic CollegeДокумент16 страницPaper Battery-Murugappa Polytechnic Collegekaviya DОценок пока нет