Вам также может понравиться
- Prova Termomecanica 2019Документ20 страницProva Termomecanica 2019Ligia Enomoto Araki100% (1)
- Emprego Das Classes de Palavras 1Документ10 страницEmprego Das Classes de Palavras 1Rodolfo SilvaОценок пока нет
- Miasmas Luiz PDFДокумент37 страницMiasmas Luiz PDFLuiz Arias100% (1)
- 6 - Estudos de Caso - Estúdios FotográficosДокумент5 страниц6 - Estudos de Caso - Estúdios FotográficosRogério VargasОценок пока нет
- Evolução Da PornografiaДокумент13 страницEvolução Da PornografiaHugo LeonardoОценок пока нет
- Curso de Unhas BoticárioДокумент101 страницаCurso de Unhas BoticárioLarissaCarvalhoОценок пока нет
- Tabela+Parametros+de+Corte+ +V2+2021Документ5 страницTabela+Parametros+de+Corte+ +V2+2021Stanlei FernandaОценок пока нет
- A Metodologia Design Thinking Como Estratégia Gerencial para Empreendimentos (Revisar)Документ19 страницA Metodologia Design Thinking Como Estratégia Gerencial para Empreendimentos (Revisar)Wanderson SantosОценок пока нет
- DCR Aimorés 2017Документ33 страницыDCR Aimorés 2017Lusineide SilvaОценок пока нет
- Chega de DesculpasДокумент15 страницChega de DesculpasCíntiaRamosОценок пока нет
- Teste Circuito Económico 1Документ7 страницTeste Circuito Económico 1Sara Ferrão100% (1)
- Ebook 16 BatidasДокумент13 страницEbook 16 BatidasAndré OliveiraОценок пока нет
- Comunicação Pública e Comunicação de Governo - Exercício Avaliativo - Módulo 5 - Revisão Da TentativaДокумент2 страницыComunicação Pública e Comunicação de Governo - Exercício Avaliativo - Módulo 5 - Revisão Da TentativaFlávia Passos SalesОценок пока нет
- Migração OLT 7360FX v1Документ29 страницMigração OLT 7360FX v1Bruno PereiraОценок пока нет
- Química - Caderno de Resoluções - Apostila Volume 1 - Pré-Universitário - Quim1 Aula01Документ2 страницыQuímica - Caderno de Resoluções - Apostila Volume 1 - Pré-Universitário - Quim1 Aula01Química Caderno de ResoluçõesОценок пока нет
- Razão Vontade e DesejoДокумент12 страницRazão Vontade e DesejoEduardo DumkeОценок пока нет
- Resumo Das Aulas de ImunologiaДокумент56 страницResumo Das Aulas de ImunologiaClaudio Vieira da SilvaОценок пока нет
- 1882 - Almanak Do Ministerio Da GuerraДокумент389 страниц1882 - Almanak Do Ministerio Da GuerraSamuel Robes LoureiroОценок пока нет
- Manual de Segurança e Boas Práticas INEMДокумент224 страницыManual de Segurança e Boas Práticas INEMRúben VianaОценок пока нет
- Curso 1Документ6 страницCurso 1JR JRОценок пока нет
- A Noção de Obstáculo Epistemológico e A Educação MatemáticaДокумент13 страницA Noção de Obstáculo Epistemológico e A Educação MatemáticaMaryanne MirandaОценок пока нет
- Iniciaçao Reiki 3BДокумент8 страницIniciaçao Reiki 3BMarioMoraisОценок пока нет
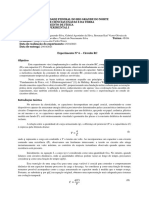
- A6 - Circuito RCДокумент7 страницA6 - Circuito RCVinicius MoraesОценок пока нет
- O Desenho Do Par EducativoДокумент7 страницO Desenho Do Par EducativoPris SousaОценок пока нет
- Sociologia Do TurismoДокумент10 страницSociologia Do TurismoDaniel JoiaОценок пока нет
- O Verbo Encantado. Imagens Do Padre Cícero Na Literatura de Cordel. Francisco Regis Lopes RamosДокумент13 страницO Verbo Encantado. Imagens Do Padre Cícero Na Literatura de Cordel. Francisco Regis Lopes Ramosamanda_teixeira_1Оценок пока нет
- Livro Texto - Unidade IIДокумент61 страницаLivro Texto - Unidade IIGustavo NascimentoОценок пока нет
- Destino Manifesto 2 PDFДокумент17 страницDestino Manifesto 2 PDFalgoz36Оценок пока нет
- Mapa Mental CriminologiaДокумент11 страницMapa Mental CriminologiaJuliana Cordeiro0% (1)
- Sistema de Modelagem Costeira Do BrasilДокумент416 страницSistema de Modelagem Costeira Do BrasilRafaela SousaОценок пока нет
- Introdução Às Redes De Computadores: Modelos Osi E Tcp/ipОт EverandIntrodução Às Redes De Computadores: Modelos Osi E Tcp/ipОценок пока нет
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalОт EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalОценок пока нет
- Faça o tempo trabalhar para você: e alcance resultados extraordináriosОт EverandFaça o tempo trabalhar para você: e alcance resultados extraordináriosРейтинг: 5 из 5 звезд5/5 (2)