Вам также может понравиться
- Chap. 2 - Stabilité PDFДокумент28 страницChap. 2 - Stabilité PDFHamza AinasОценок пока нет
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueОт EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériqueОценок пока нет
- Analyse 1 - KIENTEGA Gérard 1Документ24 страницыAnalyse 1 - KIENTEGA Gérard 1Jocelyn zienlet SOMDAОценок пока нет
- La méthode R.A.P.I.D.E. de la confiance en soi: Exercices et astuces pratiquesОт EverandLa méthode R.A.P.I.D.E. de la confiance en soi: Exercices et astuces pratiquesОценок пока нет
- COMPOSITION HARMO SCPH TL2 2019 - WahabdiopДокумент2 страницыCOMPOSITION HARMO SCPH TL2 2019 - WahabdiopAlioune Badara NdiayeОценок пока нет
- 4061Документ4 страницы4061Usthb EtudiantОценок пока нет
- Cours Math D'analyse Et Algèbre 2021 - 2022Документ9 страницCours Math D'analyse Et Algèbre 2021 - 2022Rose Marie Liliana AmoaОценок пока нет
- Etude D'Un Montage de Roulement: Sujet 1: EnoncéДокумент12 страницEtude D'Un Montage de Roulement: Sujet 1: EnoncéSoufiane BounezraОценок пока нет
- Exercices PouliesДокумент4 страницыExercices Pouliessaidi chaoukiОценок пока нет
- Corrigé td1 - Lecon1Документ6 страницCorrigé td1 - Lecon1mrst 2000Оценок пока нет
- Canevas LicenceДокумент8 страницCanevas LicenceKassi ZidaneОценок пока нет
- Les Amplificateurs de PuissanceДокумент13 страницLes Amplificateurs de PuissanceWalid Foudad100% (2)
- 03 Résumé FreinsДокумент1 страница03 Résumé Freinsdayzen jiffОценок пока нет
- CM - Automatisme Et Info Ind - 2020 - Chap 1Документ24 страницыCM - Automatisme Et Info Ind - 2020 - Chap 1Tchapdie Bris100% (1)
- Fiche 25 Le Grafcet Exercice 4Документ4 страницыFiche 25 Le Grafcet Exercice 4Isaac Sidibe100% (1)
- Automatique L2Документ59 страницAutomatique L2danОценок пока нет
- Revit Mep Bim 5jДокумент4 страницыRevit Mep Bim 5jAnonymous adud1Cp2Оценок пока нет
- CH 2 Dénombrement Et Espace de ProbabilitéДокумент14 страницCH 2 Dénombrement Et Espace de ProbabilitéOutmane SOUID AHMEDОценок пока нет
- Remplissage de CuvesДокумент3 страницыRemplissage de Cuvesmaria pianaОценок пока нет
- L3B-RATT-C++-HALICHE - 2020 2021xДокумент4 страницыL3B-RATT-C++-HALICHE - 2020 2021xRosa BabeОценок пока нет
- Valeurs Centrales 08 02 07Документ21 страницаValeurs Centrales 08 02 07[AE]Оценок пока нет
- Bary CentreДокумент17 страницBary Centremetalleux593100% (1)
- StationdepompageДокумент4 страницыStationdepompageHadi Ben SaïdОценок пока нет
- CH01Документ7 страницCH01Hatem LaajiliОценок пока нет
- Memoire Abdalah 1 PDFДокумент92 страницыMemoire Abdalah 1 PDFJoslin MutomboОценок пока нет
- Grafcet S - ChoixДокумент27 страницGrafcet S - ChoixAyb Cha Kri100% (1)
- 675-Estimation Du Débit en Fonction de La Position de La VanneДокумент3 страницы675-Estimation Du Débit en Fonction de La Position de La Vannerequin2101Оценок пока нет
- LIVRE MATH ALGEBRE Prof. FOADEДокумент172 страницыLIVRE MATH ALGEBRE Prof. FOADEvivikit956Оценок пока нет
- Mini Projet GestionДокумент1 страницаMini Projet GestionDjouweinannodji Yves0% (1)
- Chapitre IДокумент16 страницChapitre Ibk omОценок пока нет
- Courn3disjoncteuretf PDFДокумент4 страницыCourn3disjoncteuretf PDFMohamed BenrahalОценок пока нет
- BTS Construction NavaleДокумент2 страницыBTS Construction NavaleriadhОценок пока нет
- Rapport de TP MicrocontrôleurДокумент13 страницRapport de TP MicrocontrôleurKhalloukiElMahdiОценок пока нет
- Alimentation D'une LEDДокумент17 страницAlimentation D'une LEDChakib KaОценок пока нет
- TD Analyse 2 Intégrale de Riemann 07-08 Semestre 2 SMPC FSSM by RayДокумент11 страницTD Analyse 2 Intégrale de Riemann 07-08 Semestre 2 SMPC FSSM by RaySouley. Traore100% (1)
- Vocabulaire Des Formes Des Pieces PDFДокумент6 страницVocabulaire Des Formes Des Pieces PDFtagne simo rodrigueОценок пока нет
- Exercices À Faire An Num SMI SMA S4Документ4 страницыExercices À Faire An Num SMI SMA S4Ayoub JaaouaniОценок пока нет
- Cours EtancheiteДокумент4 страницыCours EtancheiteAbdou Lahat NdiayeОценок пока нет
- Asservissement Matlab SimulinkДокумент17 страницAsservissement Matlab SimulinkSerge Hermann Ménéas100% (1)
- Prinicpe Fondamental StatiqueДокумент9 страницPrinicpe Fondamental StatiqueJp Tauvel100% (1)
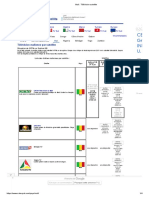
- Mali - Télévision SatelliteДокумент4 страницыMali - Télévision SatellitesowОценок пока нет
- Mt14 Poly Complet P2016Документ131 страницаMt14 Poly Complet P2016Mari MareqsdfОценок пока нет
- Fonction Logique CombinatoireДокумент10 страницFonction Logique CombinatoiremamОценок пока нет
- Cours No.6 PDFДокумент60 страницCours No.6 PDFWolfpackxx86Оценок пока нет
- Compte Rendu ElectrothecniqueДокумент13 страницCompte Rendu ElectrothecniqueBadreddineОценок пока нет
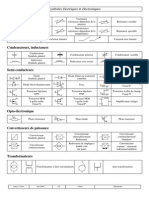
- Symboles Electroniques ElecДокумент2 страницыSymboles Electroniques ElecjmforshoppingОценок пока нет
- Comment Poser Une Question en Anglais PDFДокумент2 страницыComment Poser Une Question en Anglais PDFEmilyОценок пока нет
- Corrigé TD 4 Marrakech PDFДокумент8 страницCorrigé TD 4 Marrakech PDFIbtissam ElhammoumyОценок пока нет
- CI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Документ7 страницCI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiОценок пока нет
- Notion D Arithmetique Cours 1 PDFДокумент2 страницыNotion D Arithmetique Cours 1 PDFZahra Elkasmy100% (1)
- Mathématiques Générales 2 Examen FinalДокумент1 страницаMathématiques Générales 2 Examen FinalJoël Mètogbé ZinsaloОценок пока нет
- Cours C MpseДокумент33 страницыCours C Mpseأسامة يعقوبيОценок пока нет
- Loi n°05-93-ADP Portant Statut Particulier de La Province Du Kadiogo1Документ6 страницLoi n°05-93-ADP Portant Statut Particulier de La Province Du Kadiogo1Lamy EnochОценок пока нет
- Cours Norme Iso 9001 2015Документ95 страницCours Norme Iso 9001 2015Elsa KenneОценок пока нет
- pogrammeAPhysique Chimie Texhnologique - commentairesAPC PDFДокумент112 страницpogrammeAPhysique Chimie Texhnologique - commentairesAPC PDFSamba Koukouare ProsperОценок пока нет
- Coursd'Electroniques (YAP)Документ168 страницCoursd'Electroniques (YAP)anoh guyОценок пока нет
- Cours L1-Introduction À L'environnementДокумент27 страницCours L1-Introduction À L'environnementgabimarucirussОценок пока нет
- Etude Theorique Du TraficДокумент31 страницаEtude Theorique Du TraficTulipe Pivoine100% (1)
- Calcul TensorielДокумент5 страницCalcul TensorielCristiano da silvaОценок пока нет
- Analyse. 4, Series de Fourier, - Servien, ClaudeДокумент132 страницыAnalyse. 4, Series de Fourier, - Servien, ClaudeFehmi Ftirich100% (3)
- Corchp4 Corriger Serie de FourierДокумент5 страницCorchp4 Corriger Serie de FourierRegis MakossoОценок пока нет
- 2021 MP Sujet de Mathématiques B (X)Документ6 страниц2021 MP Sujet de Mathématiques B (X)ahmed aboulkacemОценок пока нет
- Poly Vibration NDDL 1Документ4 страницыPoly Vibration NDDL 1Ahmed HamezaОценок пока нет
- Exercice Corrigé: Probabilités Conditionnelles Et Matrices: Fichier Extrait Du DocumentДокумент2 страницыExercice Corrigé: Probabilités Conditionnelles Et Matrices: Fichier Extrait Du DocumentABRAHAM NENEОценок пока нет
- DS1 4 Tech 2020&2021Документ4 страницыDS1 4 Tech 2020&2021Ghassen AyariiОценок пока нет
- SuitesДокумент37 страницSuitesbeebac2009100% (1)
- Nouvelles Histoires Hédonistes de Groupes Et de GéométriesДокумент607 страницNouvelles Histoires Hédonistes de Groupes Et de GéométriesYasserОценок пока нет
- Analyse 1Документ3 страницыAnalyse 1dggfgfhggfhghОценок пока нет
- Ahmed Lesfari - Variables Complexes Cours Et Exercices Corrigés-Ellipses Marketing (2014)Документ435 страницAhmed Lesfari - Variables Complexes Cours Et Exercices Corrigés-Ellipses Marketing (2014)Eddahbi Ettahiri100% (1)
- Solution Au Probleme de 03 CorpsДокумент24 страницыSolution Au Probleme de 03 CorpsongoloОценок пока нет
- Serie1 Analyse4Документ1 страницаSerie1 Analyse4Oulghazi hamidОценок пока нет
- Cours Monde3D 2017 09-GeometryДокумент142 страницыCours Monde3D 2017 09-GeometrySanaa HassaineОценок пока нет
- S2-Cours3 (Matrice)Документ10 страницS2-Cours3 (Matrice)ANAAS benooОценок пока нет
- Code Aster - PrecontrainteДокумент25 страницCode Aster - PrecontrainteAlexandros GiОценок пока нет
- 4ds1-2009 2010Документ2 страницы4ds1-2009 2010Kais Ben AichaОценок пока нет
- Master SMA FSSM 2015Документ4 страницыMaster SMA FSSM 2015Med Achraf MhamdiОценок пока нет
- Devoir DL Tan CorrectionДокумент5 страницDevoir DL Tan CorrectionDJIL BENОценок пока нет
- Mathematiques 1ere DДокумент94 страницыMathematiques 1ere DHien Corneille100% (7)
- 4.M.S.1 16.17Документ3 страницы4.M.S.1 16.17chaker albouchiОценок пока нет
- Chapitre 4Документ8 страницChapitre 4Chemkhi Mohamed Ali100% (1)
- TD4 MQ1 2019-20Документ25 страницTD4 MQ1 2019-20Hasan Elmoumni100% (1)
- COURS4 Complexes PDFДокумент18 страницCOURS4 Complexes PDFMayindu KyriaОценок пока нет
- Série N°1 Équations Et Inéquations Irrationnelles 1S1Документ5 страницSérie N°1 Équations Et Inéquations Irrationnelles 1S1Moussa diallo100% (1)
- Relations D'équivalence, IIДокумент0 страницRelations D'équivalence, IIPaul JeannotОценок пока нет
- Chapitre 3 Applications Affines: 3.1 Définition Et PropriétésДокумент5 страницChapitre 3 Applications Affines: 3.1 Définition Et Propriétéspanam NakpaneОценок пока нет
- Algèbre 4Документ53 страницыAlgèbre 4Valentin ZongoОценок пока нет
- Exercice N°1: Devoir de Contrôle N°3 MR Ben Sidhom MongiДокумент2 страницыExercice N°1: Devoir de Contrôle N°3 MR Ben Sidhom MongiMongi B SidhomОценок пока нет
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsОт EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsРейтинг: 5 из 5 звезд5/5 (1)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?От EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Рейтинг: 4 из 5 звезд4/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfОт EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfОценок пока нет
- La pensée dirigée: Traité sur le raisonnement et les logiquesОт EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesРейтинг: 5 из 5 звезд5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresОт EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresРейтинг: 5 из 5 звезд5/5 (2)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.От EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Оценок пока нет
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!От EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Рейтинг: 2 из 5 звезд2/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesОт EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesРейтинг: 4 из 5 звезд4/5 (11)
- Enjeux contemporains de l'éducation scientifique et technologiqueОт EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniОценок пока нет
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceОт EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceОценок пока нет
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesОт EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesОценок пока нет
- Enchevêtrement quantique et inconscient collectif. Physique et métaphysique de l'univers. Nouvelles interprétations.От EverandEnchevêtrement quantique et inconscient collectif. Physique et métaphysique de l'univers. Nouvelles interprétations.Оценок пока нет
- Enchevêtrement quantique et synchronicité. Champs de force. Non-localité. Perceptions extrasensorielles. Les propriétés surprenantes de la physique quantique.От EverandEnchevêtrement quantique et synchronicité. Champs de force. Non-localité. Perceptions extrasensorielles. Les propriétés surprenantes de la physique quantique.Рейтинг: 5 из 5 звезд5/5 (1)