Вам также может понравиться
- Design Manual Mist Eliminator - NewДокумент16 страницDesign Manual Mist Eliminator - Newashif100% (2)
- AASHTO T 311 - Grain-Size Analysis of Granular MaterialsДокумент10 страницAASHTO T 311 - Grain-Size Analysis of Granular MaterialsYuri Valencia100% (1)
- 2 Dass 42Документ3 страницы2 Dass 42Maria Janna Dinglasan100% (1)
- 900 Production SeparatorsДокумент46 страниц900 Production SeparatorsUghojor ElohoОценок пока нет
- Astm A126Документ3 страницыAstm A126banglvhОценок пока нет
- Structural Design of Swimming PoolsДокумент12 страницStructural Design of Swimming Poolsale hopeju200975% (20)
- Final Project Report Transient Stability of Power System (Programming Massively Parallel Graphics Multiprocessors Using CUDA)Документ5 страницFinal Project Report Transient Stability of Power System (Programming Massively Parallel Graphics Multiprocessors Using CUDA)shotorbariОценок пока нет
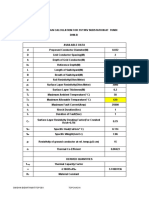
- Earthmat CalculationДокумент4 страницыEarthmat CalculationpradipОценок пока нет
- Design and Tuning of A Ratio ControllerДокумент13 страницDesign and Tuning of A Ratio ControllerEzgi CoşkunОценок пока нет
- Solutions To Miscellaneous Exercise 2: (Ho Soo Thong & Khor Nyak Hiong's Panpac Additional Mathematics)Документ18 страницSolutions To Miscellaneous Exercise 2: (Ho Soo Thong & Khor Nyak Hiong's Panpac Additional Mathematics)Lim Kew ChongОценок пока нет
- An Approach Towards The Design of A Petlyuk Column Using HYSYSДокумент11 страницAn Approach Towards The Design of A Petlyuk Column Using HYSYSsamandondonОценок пока нет
- GREEN SAND PREPARATION (Manufacturing Lab /foundry)Документ21 страницаGREEN SAND PREPARATION (Manufacturing Lab /foundry)Fakhrur Razi84% (19)
- Perform Manual Metal Arc WeldingДокумент107 страницPerform Manual Metal Arc WeldingroostercockburnОценок пока нет
- Factorial ExperimentsДокумент24 страницыFactorial Experiments7abib77Оценок пока нет
- Xiong 2006Документ12 страницXiong 2006Sidhant SharanОценок пока нет
- 1 s20 S0019057812000249 MainДокумент10 страниц1 s20 S0019057812000249 MainMINAR SОценок пока нет
- 2015-Adaptive Multi-Loop Fractional Order PID - USBДокумент8 страниц2015-Adaptive Multi-Loop Fractional Order PID - USBAravindan MohanОценок пока нет
- A Novel Method in Classifying and Analysing Faults in Renewable Energy Power TransformersДокумент7 страницA Novel Method in Classifying and Analysing Faults in Renewable Energy Power TransformersAlawy AbdoОценок пока нет
- Adaptive Generic Model Control: Dual Composition Control of DistillationДокумент11 страницAdaptive Generic Model Control: Dual Composition Control of DistillationYlm PtanaОценок пока нет
- Process Control DesignДокумент7 страницProcess Control DesignudayОценок пока нет
- N Adaptive PID Controller Based On Genetic Algorithm ProcessorДокумент6 страницN Adaptive PID Controller Based On Genetic Algorithm ProcessorEngr Nayyer Nayyab MalikОценок пока нет
- High-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsДокумент7 страницHigh-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsAbdesselem BoulkrouneОценок пока нет
- A Simple Method For On-Line Identification and Controller TuningДокумент3 страницыA Simple Method For On-Line Identification and Controller TuningNMDVN100% (2)
- The Relative Gain For Non-Square Multivariable Systems - Chang1990 PDFДокумент15 страницThe Relative Gain For Non-Square Multivariable Systems - Chang1990 PDFHesam AhmadianОценок пока нет
- Optimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsДокумент6 страницOptimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsabdieljosadacОценок пока нет
- Aa Automation MPC Sag Mills Flotation Circuits DataДокумент12 страницAa Automation MPC Sag Mills Flotation Circuits DataSamuel Antimilla NahuelpanОценок пока нет
- General Graph Optimization Framework for Robotics and Computer Vision ProblemsДокумент7 страницGeneral Graph Optimization Framework for Robotics and Computer Vision ProblemsSidharth SharmaОценок пока нет
- Fuzzy-Based Nonlinear PID Controller and Its Application To CSTRДокумент7 страницFuzzy-Based Nonlinear PID Controller and Its Application To CSTRZikra ElninoОценок пока нет
- Multi-Model Predictive Control MMPC For Non-Linear Systems With Time Delay An Experimental InvestigationДокумент5 страницMulti-Model Predictive Control MMPC For Non-Linear Systems With Time Delay An Experimental InvestigationVatsal KediaОценок пока нет
- Tuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsДокумент8 страницTuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsKapilSahuОценок пока нет
- Research On Active Disturbance Rejection Controller Integrated in TSVGДокумент6 страницResearch On Active Disturbance Rejection Controller Integrated in TSVGDileep VarmaОценок пока нет
- A practical multiple model adaptive strategy for MPCДокумент16 страницA practical multiple model adaptive strategy for MPCpusikurac1234567Оценок пока нет
- Design of Stable Fuzzy Controllers For An AGVДокумент8 страницDesign of Stable Fuzzy Controllers For An AGVMihai Alexandru OlaruОценок пока нет
- PID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangДокумент7 страницPID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangAnonymous WkbmWCa8MОценок пока нет
- (X) Prusty2015Документ6 страниц(X) Prusty2015Moh IneОценок пока нет
- Data Driven Fault Tolerant Control With Fuzzy Rules Equiv - 2022 - Journal of CoДокумент13 страницData Driven Fault Tolerant Control With Fuzzy Rules Equiv - 2022 - Journal of CodeivisОценок пока нет
- Exact Tuning of PID ControllersДокумент6 страницExact Tuning of PID Controllersmazaher karamiОценок пока нет
- 1 s20 S1474667016327744 MainДокумент8 страниц1 s20 S1474667016327744 MainMINAR SОценок пока нет
- Opcion 2Документ22 страницыOpcion 2María Lucía Pérez MoralesОценок пока нет
- Icad RgaДокумент7 страницIcad Rgaeuzkadi_guipuzkuaОценок пока нет
- Bendjeghaba 2013Документ4 страницыBendjeghaba 2013Rahmat FaisalОценок пока нет
- A Novel Computational Method For Loop Gain and Phase Margins of TITO SystemsДокумент18 страницA Novel Computational Method For Loop Gain and Phase Margins of TITO SystemsjishnusОценок пока нет
- ISA Transactions: Lei Kong, Jingqi YuanДокумент15 страницISA Transactions: Lei Kong, Jingqi YuanheryuanoОценок пока нет
- Robot Learning For Complex Manufacturing Process: Heping Chen, Binbin Li, Dave Gravel, George Zhang and Biao ZhangДокумент5 страницRobot Learning For Complex Manufacturing Process: Heping Chen, Binbin Li, Dave Gravel, George Zhang and Biao ZhangDavid TiguaОценок пока нет
- Estimation of Liquid-Liquid Equilibrium For A Quaternary System Using The GMDH AlgorithmДокумент6 страницEstimation of Liquid-Liquid Equilibrium For A Quaternary System Using The GMDH AlgorithmLaiadhi DjemouiОценок пока нет
- Sciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotДокумент8 страницSciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotĐức QuangОценок пока нет
- Enhanced Performance For Two-Degree-Of-Freedom Control Scheme For Second Order Unstable Processes With Time DelayДокумент6 страницEnhanced Performance For Two-Degree-Of-Freedom Control Scheme For Second Order Unstable Processes With Time DelayShamsMohdОценок пока нет
- Multi-Loop Decentralized PID Control Based On Covariance Control Criteria: An LMI ApproachДокумент15 страницMulti-Loop Decentralized PID Control Based On Covariance Control Criteria: An LMI ApproachmathivazhanОценок пока нет
- Model Free DFIGДокумент12 страницModel Free DFIG程崇律Оценок пока нет
- Crux NDCДокумент2 страницыCrux NDCLesya StasyshynaОценок пока нет
- Centralized PID Control by Decoupling of A Boiler-Turbine UnitДокумент6 страницCentralized PID Control by Decoupling of A Boiler-Turbine Unitrehan_sadiq1991Оценок пока нет
- A Review of Industrial MIMO Decoupling ControlДокумент9 страницA Review of Industrial MIMO Decoupling ControlpraveenmandeОценок пока нет
- Bendaas 2014Документ7 страницBendaas 2014Hieu LEОценок пока нет
- Control of A Multivariable System Using Optimal Control Pairs: A Quadruple-Tank ProcessДокумент100 страницControl of A Multivariable System Using Optimal Control Pairs: A Quadruple-Tank ProcessAlexander ValenciaОценок пока нет
- Direct Synthesis-Based Controller Design for Integrating Processes with Time DelayДокумент19 страницDirect Synthesis-Based Controller Design for Integrating Processes with Time DelayLloyds RajaОценок пока нет
- Evaluation of Effect of Parameters of Fractional Order Pid Controller For A Class of Linear SystemsДокумент17 страницEvaluation of Effect of Parameters of Fractional Order Pid Controller For A Class of Linear SystemsIAEME PublicationОценок пока нет
- ARW MIMO System PDFДокумент6 страницARW MIMO System PDFelenchezhiyanОценок пока нет
- Practical Use of Flexible BiCGStabДокумент21 страницаPractical Use of Flexible BiCGStabKeerthana Chandrasekar JeyanthiОценок пока нет
- Tuning of PID Controllers With Fuzzy Logic: AbstractДокумент8 страницTuning of PID Controllers With Fuzzy Logic: Abstractjames100% (1)
- Evaluation of Cost of Dynamic Controllability and Optimal Surge Capacity Without Dynamic ModelsДокумент7 страницEvaluation of Cost of Dynamic Controllability and Optimal Surge Capacity Without Dynamic ModelsMMHFОценок пока нет
- User Scheduling in Massive MIMOДокумент5 страницUser Scheduling in Massive MIMO王八蛋Оценок пока нет
- Application Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessДокумент10 страницApplication Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessAdam BuchananОценок пока нет
- RMuniraj RRST 3 2019 PP 259-265Документ7 страницRMuniraj RRST 3 2019 PP 259-265Tarak BenslimaneОценок пока нет
- Raja Pandiyan 2012Документ13 страницRaja Pandiyan 2012Sidhant SharanОценок пока нет
- Simple analytic rules for model reduction and PID controller tuningДокумент19 страницSimple analytic rules for model reduction and PID controller tuningRajendra100% (1)
- ACSE Volume12 Issue2 P1111434342Документ55 страницACSE Volume12 Issue2 P1111434342nobibi9956Оценок пока нет
- Power System StabilityДокумент8 страницPower System StabilityThiyagarjanОценок пока нет
- Helicopter Stabilization Using Integer and Fractional Order PID Controller Based On Genetic AlgorithmДокумент12 страницHelicopter Stabilization Using Integer and Fractional Order PID Controller Based On Genetic AlgorithmMohamed SakrОценок пока нет
- Software for Roundoff Analysis of Matrix AlgorithmsОт EverandSoftware for Roundoff Analysis of Matrix AlgorithmsРейтинг: 3 из 5 звезд3/5 (1)
- Dynamic Behavior of Alternative Separation Processes For Ethanol Dehydration by Extractive DistillationДокумент32 страницыDynamic Behavior of Alternative Separation Processes For Ethanol Dehydration by Extractive DistillationsamandondonОценок пока нет
- Implementation of Ethanol Dehydration Using Dividing-Wall Heterogeneous Azeotropic Distillation ColumnДокумент12 страницImplementation of Ethanol Dehydration Using Dividing-Wall Heterogeneous Azeotropic Distillation ColumnsamandondonОценок пока нет
- Optimization and Dynamics of Distillation Column Using Aspen PlusДокумент7 страницOptimization and Dynamics of Distillation Column Using Aspen PlusResmi SureshОценок пока нет
- Macro Scale Modeling and Simulation of Two Phase Flow in Fibrous Liquid Aerosol FiltersДокумент13 страницMacro Scale Modeling and Simulation of Two Phase Flow in Fibrous Liquid Aerosol FilterssamandondonОценок пока нет
- Operation and Dynamic Behavior of Wire Mesh PadsДокумент16 страницOperation and Dynamic Behavior of Wire Mesh PadssamandondonОценок пока нет
- Ox or Na.: Ell Horror-Les-4 - 4 - E. S NДокумент7 страницOx or Na.: Ell Horror-Les-4 - 4 - E. S NsamandondonОценок пока нет
- The Higher Order Unscented FilterДокумент6 страницThe Higher Order Unscented FiltersamandondonОценок пока нет
- 5560 English PDFДокумент11 страниц5560 English PDFdonyaОценок пока нет
- Application of Numerical Simulation in The Design of Wire-Mesh Mist EliminatorДокумент4 страницыApplication of Numerical Simulation in The Design of Wire-Mesh Mist EliminatorsamandondonОценок пока нет
- Separating Liquids and Gases Under High PressureДокумент8 страницSeparating Liquids and Gases Under High PressuresamandondonОценок пока нет
- Integrated Design and Control of Chemical Processes - Part I - Revision and ClassificationДокумент16 страницIntegrated Design and Control of Chemical Processes - Part I - Revision and ClassificationsamandondonОценок пока нет
- Multifunctional Microchip-Based Distillation Apparatus I - Steam Distillation For Formaldehyde DetectionДокумент8 страницMultifunctional Microchip-Based Distillation Apparatus I - Steam Distillation For Formaldehyde DetectionsamandondonОценок пока нет
- Investigating The Effect of Inherent Safety Principles On System Reliability in Process DesignДокумент11 страницInvestigating The Effect of Inherent Safety Principles On System Reliability in Process DesignsamandondonОценок пока нет
- Design and Control of A Separation Process For Bioethanol Purification by Reactive DistillationДокумент6 страницDesign and Control of A Separation Process For Bioethanol Purification by Reactive DistillationsamandondonОценок пока нет
- Successfully Specify Three-Phase Separators: Chemical Engineering Progress January 1994Документ13 страницSuccessfully Specify Three-Phase Separators: Chemical Engineering Progress January 1994samandondonОценок пока нет
- Optimal Selection of Operating Pressure For Distillation ColumnsДокумент17 страницOptimal Selection of Operating Pressure For Distillation ColumnssamandondonОценок пока нет
- Global Optimization of Multicomponent Distillation Configurations - Global Minimization of Total Cost For Multicomponent Mixture SeparationsДокумент14 страницGlobal Optimization of Multicomponent Distillation Configurations - Global Minimization of Total Cost For Multicomponent Mixture SeparationssamandondonОценок пока нет
- Inherently Safer Design of A Reactor Network System A Case StudyДокумент13 страницInherently Safer Design of A Reactor Network System A Case StudysamandondonОценок пока нет
- Development of Inherent Safety Benefits Index To Analyse The Impact of Inherent Safety ImplementationДокумент19 страницDevelopment of Inherent Safety Benefits Index To Analyse The Impact of Inherent Safety ImplementationsamandondonОценок пока нет
- A Review of Safety Indices For Process DesignДокумент7 страницA Review of Safety Indices For Process DesignsamandondonОценок пока нет
- Distillation Pressure Control Troubleshooting-The Hidden Pittfalls of OverdesignДокумент5 страницDistillation Pressure Control Troubleshooting-The Hidden Pittfalls of OverdesignsamandondonОценок пока нет
- Distillation Pressure Control Troubleshooting-The Hidden Pittfalls of OverdesignДокумент5 страницDistillation Pressure Control Troubleshooting-The Hidden Pittfalls of OverdesignsamandondonОценок пока нет
- Inherently Safer Design of A Reactor Network System A Case StudyДокумент13 страницInherently Safer Design of A Reactor Network System A Case StudysamandondonОценок пока нет
- Global Optimization of Multicomponent Distillation Configurations - Global Minimization of Total Cost For Multicomponent Mixture SeparationsДокумент14 страницGlobal Optimization of Multicomponent Distillation Configurations - Global Minimization of Total Cost For Multicomponent Mixture SeparationssamandondonОценок пока нет
- Globally Optimal Networks For Multipressure Distillation of Homogeneous Azeotropic Mixtures - Ghougassian2012Документ18 страницGlobally Optimal Networks For Multipressure Distillation of Homogeneous Azeotropic Mixtures - Ghougassian2012samandondonОценок пока нет
- Analysis of Dynamic Performance For Multiple Dividing Wall Distillation ColumnsДокумент8 страницAnalysis of Dynamic Performance For Multiple Dividing Wall Distillation ColumnssamandondonОценок пока нет
- Comparison of Pressure-Swing Distillation and Extractive Distillation Methods For Isopropyl AlcoholDiisopropyl Ether SeparationДокумент16 страницComparison of Pressure-Swing Distillation and Extractive Distillation Methods For Isopropyl AlcoholDiisopropyl Ether SeparationsamandondonОценок пока нет
- Parts Catalog: Indoor Unit Outdoor UnitДокумент14 страницParts Catalog: Indoor Unit Outdoor UnitJose Antonio Chacon JimenezОценок пока нет
- The Introduction of Self-Registering Meteorological Instruments by George Forrest BrowneДокумент20 страницThe Introduction of Self-Registering Meteorological Instruments by George Forrest BrownesigjoatrumbzОценок пока нет
- Health Assessment of Structures PaperДокумент4 страницыHealth Assessment of Structures PaperNirmal ModyОценок пока нет
- Applied Energy: Brecht Baeten, Frederik Rogiers, Lieve HelsenДокумент12 страницApplied Energy: Brecht Baeten, Frederik Rogiers, Lieve HelsenSindhu KanyaОценок пока нет
- GC1 Q1 Week-5c PDFДокумент12 страницGC1 Q1 Week-5c PDFLovely MavilОценок пока нет
- 45 Days Long Virtual Internship On Oil & Gas Industrial PracticesДокумент10 страниц45 Days Long Virtual Internship On Oil & Gas Industrial PracticesKaran LunaОценок пока нет
- S823 Airfoil: Flluid Mechanics D MechanicsДокумент13 страницS823 Airfoil: Flluid Mechanics D MechanicsSamar AlgheetanyОценок пока нет
- Science - 5 January 2024Документ122 страницыScience - 5 January 2024vidyaindicworldviewОценок пока нет
- Hardness Test Report 2021Документ6 страницHardness Test Report 2021Md. Nahin Al ZakiОценок пока нет
- Wil 12620 eДокумент40 страницWil 12620 eJayesh GawadОценок пока нет
- Aws A4.3 93Документ27 страницAws A4.3 93Martin Urriza VelazquezОценок пока нет
- School of Engineering Department of Mechanical EngineeringДокумент17 страницSchool of Engineering Department of Mechanical EngineeringMohammed KawashОценок пока нет
- Activity 2.1electron StructureДокумент3 страницыActivity 2.1electron StructureKelvin Mark KaabayОценок пока нет
- Difference BETWEEN OLD STRUCTURE AND NEW STRUCTURE ON SAME BUILDINGДокумент6 страницDifference BETWEEN OLD STRUCTURE AND NEW STRUCTURE ON SAME BUILDINGSudarshan PatilОценок пока нет
- Oil Filter Inspection - What To Look ForДокумент7 страницOil Filter Inspection - What To Look ForchrisОценок пока нет
- Stages of Fatigue Failure in MetalsДокумент15 страницStages of Fatigue Failure in MetalsBabangida Bello D. FuroОценок пока нет
- Week2-Mechanical PropertiesДокумент34 страницыWeek2-Mechanical PropertiesMuhammad AzeemОценок пока нет
- Patterns and mathematical concepts in natureДокумент6 страницPatterns and mathematical concepts in natureGeneОценок пока нет
- Macarthur National High School: A A A AДокумент2 страницыMacarthur National High School: A A A AAbegail RabanesОценок пока нет
- 1106 (2007) Peter J. Lu and Paul J. Steinhardt: ScienceДокумент6 страниц1106 (2007) Peter J. Lu and Paul J. Steinhardt: ScienceSalimÇallıОценок пока нет
- Analisa Unjuk Kerja Mesin Stempel Flash Made in Tiongkok Merek Flaz Terhadap Mesin Stempel Flash Made in Indonesia Merek MDДокумент6 страницAnalisa Unjuk Kerja Mesin Stempel Flash Made in Tiongkok Merek Flaz Terhadap Mesin Stempel Flash Made in Indonesia Merek MDbinangkit androidОценок пока нет
- APCalAB - PT01 - Section1 - Part BДокумент10 страницAPCalAB - PT01 - Section1 - Part BSurgaltiin Alba MBparkОценок пока нет
- Material Characterization of Filament-Wound Composite PipesДокумент10 страницMaterial Characterization of Filament-Wound Composite PipesMatheusОценок пока нет
- Grade 3 Worksheets-Roy - TiapeДокумент8 страницGrade 3 Worksheets-Roy - TiapeJerbs PacundoОценок пока нет