Вам также может понравиться
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionОт EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionРейтинг: 2.5 из 5 звезд2.5/5 (4)
- Matrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesОт EverandMatrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesРейтинг: 4.5 из 5 звезд4.5/5 (3)
- IITB MechanicsДокумент49 страницIITB Mechanicskeshavkrishna20007Оценок пока нет
- CIVIL III YEAR 2 Marks 16 Marks PDFДокумент116 страницCIVIL III YEAR 2 Marks 16 Marks PDFELEVATED KnowledgeОценок пока нет
- CE 102 Engineering Mechanics 2019 PDFДокумент34 страницыCE 102 Engineering Mechanics 2019 PDFManish MeenaОценок пока нет
- Lab 5 Forces in Crane JibДокумент20 страницLab 5 Forces in Crane JibFgj JhgОценок пока нет
- CE6501 Structural Analysis IДокумент17 страницCE6501 Structural Analysis IshubhamОценок пока нет
- Lec 14, Analysis of FramesДокумент8 страницLec 14, Analysis of FramesJAWAD AHMAD BURTОценок пока нет
- Project StrucДокумент19 страницProject StrucSelesteОценок пока нет
- Ce2351 Structural Analysis IIДокумент27 страницCe2351 Structural Analysis IIvijay kumar kushwahaОценок пока нет
- CH 07Документ39 страницCH 07Anonymous 55cH67eIxОценок пока нет
- Lab 3 Sheet Shearing Force-21Sep11Документ4 страницыLab 3 Sheet Shearing Force-21Sep11Mohd FazliОценок пока нет
- Chapter 3 2D Part CompleteДокумент31 страницаChapter 3 2D Part CompleteTest PierceОценок пока нет
- Unit 1.1 - System of Coplanar ForcesДокумент35 страницUnit 1.1 - System of Coplanar ForcesRohan100% (2)
- Lecture 5 Shear and Moment in BeamsДокумент12 страницLecture 5 Shear and Moment in BeamsNile DizonОценок пока нет
- Design and Fabrication of Static and Dynamic Balancing ApparatusДокумент19 страницDesign and Fabrication of Static and Dynamic Balancing ApparatusOmkarОценок пока нет
- MachineFrames SplitДокумент70 страницMachineFrames SplitRavi TilaganjiОценок пока нет
- CE6501-Structural Analysis-IДокумент17 страницCE6501-Structural Analysis-IROOPAОценок пока нет
- Civil Iii Year 2017-2018Документ109 страницCivil Iii Year 2017-2018Frank JohnОценок пока нет
- Engineering Mechanics Tutorial Question BankДокумент13 страницEngineering Mechanics Tutorial Question Bankrajeev_kumar365Оценок пока нет
- Statics Week-1 2014Документ25 страницStatics Week-1 2014OzanCanSubaşıОценок пока нет
- Lecture 15Документ19 страницLecture 15Adam SurtiОценок пока нет
- CEng 141 - LECTURE (Part 4)Документ38 страницCEng 141 - LECTURE (Part 4)Cotangent TwoPiОценок пока нет
- Chapter6 2B PDFДокумент29 страницChapter6 2B PDFTomas VillanuevaОценок пока нет
- A1 Static - and - Dynamic - BalancingДокумент7 страницA1 Static - and - Dynamic - BalancingAkash BargeОценок пока нет
- SA-II Question BankДокумент16 страницSA-II Question BankJeevan ReddyОценок пока нет
- Homework Assignments and Due Dates Assignment Problems Due DateДокумент3 страницыHomework Assignments and Due Dates Assignment Problems Due Dateksik10Оценок пока нет
- Engineering Mechanics Question Bank - 2021-22Документ35 страницEngineering Mechanics Question Bank - 2021-22Naman JainОценок пока нет
- ch6 11 PDFДокумент72 страницыch6 11 PDFNatallia NatalliaОценок пока нет
- Eas Unit IiДокумент260 страницEas Unit IiRekha ManideepОценок пока нет
- ME101 Tutorial 01Документ4 страницыME101 Tutorial 01alex albОценок пока нет
- Experiment Shearing ForcesДокумент17 страницExperiment Shearing ForcesAnushaBheenuck73% (11)
- Gujarat Technological UniversityДокумент3 страницыGujarat Technological UniversityParesh NimodiyaОценок пока нет
- IAT 1 Engineering Mechanics Question and KeyДокумент7 страницIAT 1 Engineering Mechanics Question and KeyAnonymous RJfsy8PtОценок пока нет
- Ch3 FrameДокумент51 страницаCh3 Framengkt722Оценок пока нет
- Me6603 QB RejinpaulДокумент18 страницMe6603 QB RejinpaulAravindhanОценок пока нет
- Rolled Steel JoistsДокумент20 страницRolled Steel Joistsmanish dhariwalОценок пока нет
- Lec 03, Rectangular Components of ForceДокумент21 страницаLec 03, Rectangular Components of ForceAli Raza100% (1)
- Maae 3004 Ab - Mock FinalДокумент14 страницMaae 3004 Ab - Mock FinalRyan HiraniОценок пока нет
- Engineering Mechanics Lab PDFДокумент19 страницEngineering Mechanics Lab PDFDeepal Nandy100% (1)
- Week 3 - Equilibrium+FBDДокумент68 страницWeek 3 - Equilibrium+FBDiwhy_Оценок пока нет
- Ce 6402 Strength of Materials Two MarksДокумент39 страницCe 6402 Strength of Materials Two MarksSreenivas YerraganiОценок пока нет
- Kings: Engineering MechanicsДокумент16 страницKings: Engineering Mechanicsgovind4ever5Оценок пока нет
- Beam Analysis Using The Stiffness Method in MATLAB ProgramДокумент14 страницBeam Analysis Using The Stiffness Method in MATLAB ProgramUpadesh Shrestha100% (3)
- CE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force MethodДокумент15 страницCE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force Methodbsnow5325Оценок пока нет
- Unit 4s PDFДокумент25 страницUnit 4s PDFsmrutirekhaОценок пока нет
- Engineering Mechanics Statics: Yousif J. BasДокумент22 страницыEngineering Mechanics Statics: Yousif J. Basalnd azadОценок пока нет
- MECH 1301 Statics: Equilibrium of A ParticleДокумент20 страницMECH 1301 Statics: Equilibrium of A ParticleLabibz HasanОценок пока нет
- Lecture 1428730889Документ53 страницыLecture 1428730889Govind Gaurav100% (2)
- Module 6: Influence Lines Lecture 2:construction of Influence Lines Using Equilibrium MethodsДокумент4 страницыModule 6: Influence Lines Lecture 2:construction of Influence Lines Using Equilibrium Methodschristi SОценок пока нет
- MCM610S - Shear Force Lab Sheet - 240307 - 165001Документ3 страницыMCM610S - Shear Force Lab Sheet - 240307 - 165001Amunyela FelistasОценок пока нет
- 1 - Equilibrium of A ParticleДокумент25 страниц1 - Equilibrium of A Particlealnd azadОценок пока нет
- HW 2Документ3 страницыHW 2fojice3990Оценок пока нет
- Analysis of Statically Determinate 2D Pin-Jointed Trusses: SyllabusДокумент2 страницыAnalysis of Statically Determinate 2D Pin-Jointed Trusses: SyllabusilhammkaОценок пока нет
- Esa Imp 2014Документ3 страницыEsa Imp 2014Aeronautical Engineering HODОценок пока нет
- Structure II Model QuestionДокумент51 страницаStructure II Model QuestionVictor Deb RoyОценок пока нет
- Mechanics SolutionДокумент312 страницMechanics SolutionManon VerhoevenОценок пока нет
- Beams and Framed Structures: Structures and Solid Body MechanicsОт EverandBeams and Framed Structures: Structures and Solid Body MechanicsРейтинг: 3 из 5 звезд3/5 (2)
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainОт EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainОценок пока нет
- Rule Bki V Rules For Materials 2009Документ249 страницRule Bki V Rules For Materials 2009Saadi AlimОценок пока нет
- Wear Resistance of Material Used in Slurry TransportДокумент7 страницWear Resistance of Material Used in Slurry TransportwoodoobooОценок пока нет
- 1973 - Das - Reed - Eubank - PVT Surface and Thermodynamic Properties of Isobutane PDFДокумент10 страниц1973 - Das - Reed - Eubank - PVT Surface and Thermodynamic Properties of Isobutane PDFAlexanderОценок пока нет
- Dynamic Oring SealingДокумент49 страницDynamic Oring SealingRobert ChristoОценок пока нет
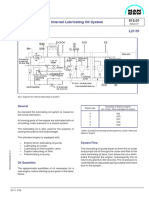
- Internal Lubricating Oil System: GeneralДокумент3 страницыInternal Lubricating Oil System: GeneralAtanasio PerezОценок пока нет
- MathsДокумент4 страницыMathsZul Abror Bin Ya'akopОценок пока нет
- TC5013A Manual 101208 PDFДокумент108 страницTC5013A Manual 101208 PDFThiyagarajan Murugesan100% (1)
- Physics Quiz BeeДокумент22 страницыPhysics Quiz BeeGeorge Isaac McQuiles100% (1)
- Flowserve PompeДокумент76 страницFlowserve Pompemariasofiarossi50% (2)
- Jacton Screw JacksДокумент5 страницJacton Screw JacksWarren LeeОценок пока нет
- Tendernotice 2Документ20 страницTendernotice 2VIVEK SAINIОценок пока нет
- Dimensions and Other Data: Gas Engines and GensetsДокумент12 страницDimensions and Other Data: Gas Engines and Gensetsjafarinha0% (1)
- PIPE STRESS ANALYSIS - FIV - AIV (Compatibility Mode)Документ48 страницPIPE STRESS ANALYSIS - FIV - AIV (Compatibility Mode)salma khalilaa putrii 6D100% (1)
- Ray Bowl MillДокумент9 страницRay Bowl MillAnup MinjОценок пока нет
- TICA модульный чиллер TCAДокумент16 страницTICA модульный чиллер TCAКирилл ЛевкевичОценок пока нет
- Mini Milling/Drilling Machine: Instruction ManualДокумент24 страницыMini Milling/Drilling Machine: Instruction Manualelchuju100% (4)
- Welder Qualification Test Certificate: Weld Test Details Range of ApprovalДокумент1 страницаWelder Qualification Test Certificate: Weld Test Details Range of ApprovalRamkunwar YadavОценок пока нет
- Development of CO2 Liquefaction Cycles For CO2 SequestratioДокумент13 страницDevelopment of CO2 Liquefaction Cycles For CO2 SequestratioFelipe Di Napoli GarciaОценок пока нет
- What Is Sewing M/C?: The M/C Which Is Used To Stitch Fabric or Other Material Together With ThreadДокумент48 страницWhat Is Sewing M/C?: The M/C Which Is Used To Stitch Fabric or Other Material Together With ThreadDewan Ajuad Hossain RifatОценок пока нет
- Mill Liner BrochureДокумент28 страницMill Liner BrochureJoseОценок пока нет
- Model Da8: (Formerly DA8/9) Direct-Acting, Positive Bias Differential Back Pressure RegulatorДокумент18 страницModel Da8: (Formerly DA8/9) Direct-Acting, Positive Bias Differential Back Pressure RegulatorBoubekeur HamegОценок пока нет
- Filtro Autolimpiante Af 113 MahleДокумент6 страницFiltro Autolimpiante Af 113 MahleHIDRAFLUIDОценок пока нет
- Toyota BT Traigo 9FBMK20T-35T Chapter 15 (Oil Control Valve) 25 - 03 - 2022 Service TrainingДокумент28 страницToyota BT Traigo 9FBMK20T-35T Chapter 15 (Oil Control Valve) 25 - 03 - 2022 Service TrainingDennis SteinbuschОценок пока нет
- Engineering Graphics and Design GR 12 PAT 2014 EngДокумент24 страницыEngineering Graphics and Design GR 12 PAT 2014 EngEdwardОценок пока нет
- New Double Coin TBR CatelogueДокумент55 страницNew Double Coin TBR CatelogueJose Andres Jimenez CasallasОценок пока нет
- Catb2001e A PDFДокумент83 страницыCatb2001e A PDFCarlos De OrnelasОценок пока нет
- Using Pulsation Damper With A Reciprocating PumpДокумент4 страницыUsing Pulsation Damper With A Reciprocating PumpIkechukwu EjimОценок пока нет
- Psychrometry of Air Conditioning ProcessДокумент56 страницPsychrometry of Air Conditioning ProcessNazia ZamanОценок пока нет
- 216-Article Text-404-1-10-20200827Документ3 страницы216-Article Text-404-1-10-20200827BADINEHALSANDEEPОценок пока нет
- Hydroflo SelectionДокумент1 страницаHydroflo SelectionJosh SorensenОценок пока нет