Вам также может понравиться
- Voltage Control:: Fig 1. Load Connected To The Source Through A LineДокумент8 страницVoltage Control:: Fig 1. Load Connected To The Source Through A LineMohd Afzal BiyabaniОценок пока нет
- Effect of Transmission Line Resistance On Direction of Real Power Flow and Inversion of Real Time Spot PricesДокумент4 страницыEffect of Transmission Line Resistance On Direction of Real Power Flow and Inversion of Real Time Spot PricesMohd Afzal Biyabani100% (1)
- Shunt Compensation Technique For EHV Transmission LinesДокумент2 страницыShunt Compensation Technique For EHV Transmission LinesMohd Afzal BiyabaniОценок пока нет
- Adaptive Compensator For A Vehicle Driven by Two Independent MotorsДокумент18 страницAdaptive Compensator For A Vehicle Driven by Two Independent MotorsMohd Afzal BiyabaniОценок пока нет
- Analysis of Pricing Using Selecitve MarketДокумент18 страницAnalysis of Pricing Using Selecitve MarketMohd Afzal BiyabaniОценок пока нет
- Compensation Techniques For A Vehicle System Driven by Independent DC MotorsДокумент24 страницыCompensation Techniques For A Vehicle System Driven by Independent DC MotorsMohd Afzal BiyabaniОценок пока нет
- Analysis of Pricing and Volumes in Selective CapacityДокумент15 страницAnalysis of Pricing and Volumes in Selective CapacityMohd Afzal BiyabaniОценок пока нет
- Heating of Cables: Mohd Afzal Biyabani g200904750Документ14 страницHeating of Cables: Mohd Afzal Biyabani g200904750Mohd Afzal BiyabaniОценок пока нет
- Surge Impedance LoadingДокумент3 страницыSurge Impedance LoadingMohd Afzal Biyabani100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Power SupplyДокумент11 страницPower SupplyDipak SalunkheОценок пока нет
- Substation Design 3 Part 1Документ32 страницыSubstation Design 3 Part 1Jet FranciscoОценок пока нет
- Power Quality Issues and Recommendations: Copper Development Association IncДокумент2 страницыPower Quality Issues and Recommendations: Copper Development Association IncJulio SamaméОценок пока нет
- THREE-CIRCUIT TRANSFORMER THEORYДокумент22 страницыTHREE-CIRCUIT TRANSFORMER THEORYSKS_2014Оценок пока нет
- 5V DC To 48V DC Converter For Phantom Power SuppliesДокумент3 страницы5V DC To 48V DC Converter For Phantom Power SuppliesHasan AlatasОценок пока нет
- Use 7% detuned reactor for power factor correctionДокумент1 страницаUse 7% detuned reactor for power factor correctionMartono Abu HanifОценок пока нет
- Verify The Gain Setting Through The SV Command Before Continuing!Документ1 страницаVerify The Gain Setting Through The SV Command Before Continuing!LUISОценок пока нет
- Concrete Manufacturers Association Membership ListДокумент37 страницConcrete Manufacturers Association Membership ListForbes KambaОценок пока нет
- MV Capacitor Banks BrochureДокумент14 страницMV Capacitor Banks BrochureBinti MasyrurohОценок пока нет
- Sewa KameraДокумент7 страницSewa KameraoyonwadaimanОценок пока нет
- A Smart Iot Based System For Monitoring and Controlling The TransformersДокумент5 страницA Smart Iot Based System For Monitoring and Controlling The TransformersAiman AyyubОценок пока нет
- PDF Sop Syringe Pump CompressДокумент4 страницыPDF Sop Syringe Pump CompressRobin Herlex PattolaОценок пока нет
- CARSAMMA RVSM Approval RecordsДокумент230 страницCARSAMMA RVSM Approval RecordsLilianОценок пока нет
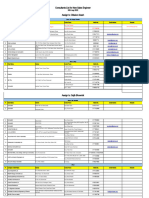
- Consultant List For New Engineer 30.05.2022Документ3 страницыConsultant List For New Engineer 30.05.2022Sajib BhowmikОценок пока нет
- 1431 FeДокумент15 страниц1431 Fetecnicogato27Оценок пока нет
- Battery Investment Cost Comparison: VRLA, Lithium, and ZBM OptionsДокумент2 страницыBattery Investment Cost Comparison: VRLA, Lithium, and ZBM OptionsChung MinhОценок пока нет
- User Manual R11015 TLДокумент80 страницUser Manual R11015 TLJean Pierre Carranza CavaniОценок пока нет
- Parallel Circuit (Discussion)Документ2 страницыParallel Circuit (Discussion)Divine Grace Burmal50% (4)
- Ölflex® Classic 115 Cy BK: Product InformationДокумент5 страницÖlflex® Classic 115 Cy BK: Product InformationPhaniОценок пока нет
- © Festo Didactic GMBH & Co. KG, 02/2009 Subject To ChangeДокумент2 страницы© Festo Didactic GMBH & Co. KG, 02/2009 Subject To ChangeBelli DavideОценок пока нет
- The Vedic Design-Carry Look Ahead (VD-CLA) - A Smart and Hardware-Friendly Implementation of The FIR Filter For ECG Signal Denoising - SpringerLinkДокумент11 страницThe Vedic Design-Carry Look Ahead (VD-CLA) - A Smart and Hardware-Friendly Implementation of The FIR Filter For ECG Signal Denoising - SpringerLinkVania V. EstrelaОценок пока нет
- Harmonic Analysis Hand Calculation For THDДокумент3 страницыHarmonic Analysis Hand Calculation For THDFabian Andres Calderon HernandezОценок пока нет
- The Wiring Rules: Motor ProtectionДокумент6 страницThe Wiring Rules: Motor ProtectionFuji Electric SMBEОценок пока нет
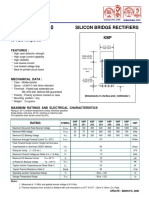
- KBP200-KBP210 Silicon Bridge Rectifiers Spec SheetДокумент2 страницыKBP200-KBP210 Silicon Bridge Rectifiers Spec SheetIsmael GuzmanОценок пока нет
- BandgapДокумент18 страницBandgapJagan FaithОценок пока нет
- Exhibit B DrawingsДокумент4 страницыExhibit B DrawingsIzzah LОценок пока нет
- Digital Signal - WikipediaДокумент4 страницыDigital Signal - WikipediaMubashir AliОценок пока нет
- L100 Classic: Iconic 3-Way Bookshelf LoudspeakerДокумент6 страницL100 Classic: Iconic 3-Way Bookshelf Loudspeakersen_iimОценок пока нет
- Ametek Technical - PublicationДокумент105 страницAmetek Technical - PublicationWallyОценок пока нет
- Be3251 Beee QBДокумент3 страницыBe3251 Beee QBMr MovieОценок пока нет