Вам также может понравиться
- 9-3 Group 3 Electric SystemДокумент2 страницы9-3 Group 3 Electric SystemJuan GarciaОценок пока нет
- Section 2 Structure and FunctionДокумент20 страницSection 2 Structure and Functiondeniden2013Оценок пока нет
- 9-6 Group 6 StructureДокумент4 страницы9-6 Group 6 StructureJuan GarciaОценок пока нет
- 9-4 Group 4 Hydraulic SystemДокумент3 страницы9-4 Group 4 Hydraulic SystemJuan GarciaОценок пока нет
- Group 2 Main Control ValveДокумент34 страницыGroup 2 Main Control Valvedeniden2013Оценок пока нет
- 9-7 Group 7 Work EquipmentДокумент1 страница9-7 Group 7 Work EquipmentJuan GarciaОценок пока нет
- 9-5 Group 5 UndercarriageДокумент2 страницы9-5 Group 5 UndercarriageJuan GarciaОценок пока нет
- 1-2 Group 2 Specifications PDFДокумент19 страниц1-2 Group 2 Specifications PDFJuan GarciaОценок пока нет
- Group 2 Specifications: 1. Major ComponentДокумент35 страницGroup 2 Specifications: 1. Major ComponentJuan GarciaОценок пока нет
- 2 1Документ21 страница2 1المهندسوليدالطويلОценок пока нет
- Group 4 Travel Device: 1. ConstructionДокумент11 страницGroup 4 Travel Device: 1. ConstructionJuan GarciaОценок пока нет
- Section 1 GeneralДокумент10 страницSection 1 GeneralSergey MovchanОценок пока нет
- 5-1 Section 5 Mechatronics SystemДокумент5 страниц5-1 Section 5 Mechatronics SystemJuan GarciaОценок пока нет
- Group 3 Automatic Deceleration System (Cluster Type 1) (Cluster Type 1)Документ2 страницыGroup 3 Automatic Deceleration System (Cluster Type 1) (Cluster Type 1)Taha RdmanОценок пока нет
- 3-4 Boom Down OperationДокумент9 страниц3-4 Boom Down OperationJuan GarciaОценок пока нет
- Circuito Hidráulico 260Документ3 страницыCircuito Hidráulico 260Camilo TorresОценок пока нет
- 324DL Diagrama ElectricoДокумент23 страницы324DL Diagrama ElectricoFrederick Carrera Jimenez100% (1)
- Caterpillar 3126 DiagramaДокумент2 страницыCaterpillar 3126 Diagramagalvez_85875% (12)
- 320l WiringДокумент2 страницы320l WiringAdal Vera86% (7)
- 3 2Документ3 страницы3 2deniden2013Оценок пока нет
- 774121101284Документ11 страниц774121101284Jorge CabreraОценок пока нет
- Group 6 RCV PedalДокумент6 страницGroup 6 RCV Pedaldeniden2013Оценок пока нет
- Group 5 RCV Lever Group 5 RCV Lever: 1. Structure 1. StructureДокумент7 страницGroup 5 RCV Lever Group 5 RCV Lever: 1. Structure 1. StructurekrisnantoОценок пока нет
- 324DL Diagrama ElectricoДокумент23 страницы324DL Diagrama ElectricoFrederick Carrera Jimenez100% (1)
- Group 2 Specifications: 1. Major ComponentДокумент35 страницGroup 2 Specifications: 1. Major ComponentJuan GarciaОценок пока нет
- Group 2 Main Control ValveДокумент34 страницыGroup 2 Main Control Valvedeniden2013Оценок пока нет
- 324DL Diagrama ElectricoДокумент23 страницы324DL Diagrama ElectricoFrederick Carrera Jimenez100% (1)
- Group 4 Travel Device: 1. ConstructionДокумент11 страницGroup 4 Travel Device: 1. ConstructionJuan GarciaОценок пока нет
- 2 1Документ21 страница2 1المهندسوليدالطويلОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- c96 AccesoriesДокумент27 страницc96 AccesoriesWAWANОценок пока нет
- JLG 30am JLG Vertical Lifts Parts ManДокумент188 страницJLG 30am JLG Vertical Lifts Parts ManSebastian GeraciОценок пока нет
- Brakes DepartmentДокумент20 страницBrakes DepartmentnishantОценок пока нет
- D-Series: Compact Track LoadersДокумент20 страницD-Series: Compact Track LoadersRamon Pujol PerramonОценок пока нет
- WB93R PDFДокумент280 страницWB93R PDFFly Ku100% (1)
- Aprilia Leonardo 250 2004 Manual de ReparatieДокумент22 страницыAprilia Leonardo 250 2004 Manual de Reparatiecalin_pirotehnistulОценок пока нет
- KilnДокумент17 страницKilnprashant mishraОценок пока нет
- Front Shock Absorber With Coil Spring: OverhaulДокумент28 страницFront Shock Absorber With Coil Spring: OverhaulMusat Catalin-MarianОценок пока нет
- Rei Vol ViiiДокумент2 страницыRei Vol ViiiDineshОценок пока нет
- Hatz Repair ManualДокумент174 страницыHatz Repair ManualGeert Vda92% (12)
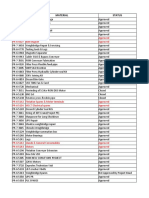
- PR Material Status: PR-6-5024 Instrument Spares Approved PR-6-5027 Belt Magnet ApprovedДокумент4 страницыPR Material Status: PR-6-5024 Instrument Spares Approved PR-6-5027 Belt Magnet ApprovedSaurabh Kumar SinghОценок пока нет
- References: Ampere Load 250% Safety Factor (Safety Design)Документ4 страницыReferences: Ampere Load 250% Safety Factor (Safety Design)Rick AlvientoОценок пока нет
- 2000 Jeep p0320Документ13 страниц2000 Jeep p0320dieselguruОценок пока нет
- Lubrication Solutions For Aerospace and Military ApplicationsДокумент6 страницLubrication Solutions For Aerospace and Military ApplicationskumarОценок пока нет
- Stator MotorДокумент8 страницStator MotorMPENDULO MABILAОценок пока нет
- Tad1340 VeДокумент6 страницTad1340 VereggbbugОценок пока нет
- ARB220CW Tech SheetДокумент2 страницыARB220CW Tech SheetJohn TrippОценок пока нет
- Steve's Handy Guide To Orbits: by Steven M. Schultheis, P.E. Houston, Texas U.S.AДокумент25 страницSteve's Handy Guide To Orbits: by Steven M. Schultheis, P.E. Houston, Texas U.S.AMuhammad HaroonОценок пока нет
- Diagrama CD PDFДокумент9 страницDiagrama CD PDFCarlos AranedaОценок пока нет
- UK Karting - Tech Talk: Preparation & Jetting of The Rotax Max CarburettorДокумент6 страницUK Karting - Tech Talk: Preparation & Jetting of The Rotax Max Carburettorjohnknight000Оценок пока нет
- E Yanmar 2v78caДокумент42 страницыE Yanmar 2v78caDannyОценок пока нет
- Brayton Cycle With RegenerationДокумент6 страницBrayton Cycle With RegenerationMeshal Al-mutairi100% (1)
- Letters IIДокумент8 страницLetters IIksriniwasОценок пока нет
- Engine SpecificationsДокумент4 страницыEngine SpecificationsMuhammad rizkiОценок пока нет
- WF3768 - 750 at 19 BAR HS - VTV - Update 20.04.2022Документ146 страницWF3768 - 750 at 19 BAR HS - VTV - Update 20.04.2022NGUYEN VAN THIОценок пока нет
- KV-S4065CL KV-S4065CW KV-S4065CWCN KV-S4085CL KV-S4085CW KV-S4085CWCNДокумент20 страницKV-S4065CL KV-S4065CW KV-S4065CWCN KV-S4085CL KV-S4085CW KV-S4085CWCNLouis ChenОценок пока нет
- Bomba Centrifuga B3ZRMSДокумент1 страницаBomba Centrifuga B3ZRMSricsnikОценок пока нет
- Linear Bearing Definitions: Motion Design GuideДокумент16 страницLinear Bearing Definitions: Motion Design GuideDracoRodriguezОценок пока нет
- 1000-Series Data SheetДокумент1 страница1000-Series Data SheetChaitannya MahatmeОценок пока нет
- Syllabus - B. E. (Mechanical)Документ73 страницыSyllabus - B. E. (Mechanical)Sukhman Singh PunianОценок пока нет