Вам также может понравиться
- Question Bank Me2401Документ13 страницQuestion Bank Me2401Anonymous p8bHAAxОценок пока нет
- EE2253 Control Systems Syllabus and QuestionsДокумент14 страницEE2253 Control Systems Syllabus and Questionsselvi0412100% (1)
- Control Systems (1-135) PDFДокумент128 страницControl Systems (1-135) PDFAnonymous huaIYe1Оценок пока нет
- ME2401 Mechatronics QBДокумент9 страницME2401 Mechatronics QBkarthiksubramanian94Оценок пока нет
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsОт EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsОценок пока нет
- ME2401 Mechatronics QBДокумент9 страницME2401 Mechatronics QBkarthiksubramanian94Оценок пока нет
- Advanced Techniques and Technology of Computer-Aided Feedback ControlОт EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlОценок пока нет
- Control System Engineering Questions and AnswersДокумент7 страницControl System Engineering Questions and AnswersYassir OwangeОценок пока нет
- EC6405 Syllabus Control Systems Engineering Class III EEEДокумент16 страницEC6405 Syllabus Control Systems Engineering Class III EEEAruna ChandranОценок пока нет
- Problems On Mechanical SystemsДокумент52 страницыProblems On Mechanical SystemsSheikameer Batcha83% (6)
- CSE University Questions Part AДокумент4 страницыCSE University Questions Part Abalaji1986Оценок пока нет
- Control Systems IMP QUESTIONSДокумент8 страницControl Systems IMP QUESTIONSHarika HarikaОценок пока нет
- 208 - EC8391, EC6405 Control System Engineering - Important QuestionsДокумент7 страниц208 - EC8391, EC6405 Control System Engineering - Important QuestionsSagar Babu NandigamaОценок пока нет
- Me2401 Mechatronics - 2 Marks With Answer PDFДокумент15 страницMe2401 Mechatronics - 2 Marks With Answer PDFSiva RamanОценок пока нет
- Control Engineering: 2 Marks Questions & AnswersДокумент16 страницControl Engineering: 2 Marks Questions & AnswersLakshumaiah MajjariОценок пока нет
- Me2401 Mechatronics - 2 Marks With AnswerДокумент15 страницMe2401 Mechatronics - 2 Marks With Answermagesh.mxОценок пока нет
- Semester - Iv Control System Question Bank: Unit - 1 Part-I (2 Marks)Документ2 страницыSemester - Iv Control System Question Bank: Unit - 1 Part-I (2 Marks)Dina GaranОценок пока нет
- Control - Systems. TWO MARKSДокумент32 страницыControl - Systems. TWO MARKSdivya vaidhyanathanОценок пока нет
- Ec6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksДокумент53 страницыEc6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksSaravanan Pazapughal100% (1)
- Adaptive Control Question Bank Without Answer KeyДокумент5 страницAdaptive Control Question Bank Without Answer KeyMATHANKUMAR.S100% (1)
- Ee2365 QBДокумент14 страницEe2365 QBKevin KarthickОценок пока нет
- Control Systems PDFДокумент12 страницControl Systems PDFLakshmi Prabha100% (1)
- ME 1402 - Mechatronics PDFДокумент6 страницME 1402 - Mechatronics PDFnagarajanceОценок пока нет
- PSN College Aeronautical Engineering Questions BankДокумент8 страницPSN College Aeronautical Engineering Questions BankNambi RajanОценок пока нет
- Unit IДокумент18 страницUnit ILAKSHMI SОценок пока нет
- Control System Question BankДокумент23 страницыControl System Question Bankdr mbaluОценок пока нет
- Rajalakshmi Engineering College: Thandalam, Chennai - 602 105Документ2 страницыRajalakshmi Engineering College: Thandalam, Chennai - 602 105Vijay RagavanОценок пока нет
- Velammal Engineering College Department of Production Engineering ME 2401 Mechat RonicsДокумент10 страницVelammal Engineering College Department of Production Engineering ME 2401 Mechat RonicsAnonymous p8bHAAxОценок пока нет
- Control System Question BankДокумент17 страницControl System Question BankerrakeshagrawalОценок пока нет
- Control Systems NotesДокумент74 страницыControl Systems NotesNirjal RanipaОценок пока нет
- Understanding Control SystemsДокумент12 страницUnderstanding Control SystemsJenifer StalinОценок пока нет
- GRT Institute of Engineering and Technology,: P.I.D.T.Bala Durai Kannan, Ap / Eee, GRT IetДокумент12 страницGRT Institute of Engineering and Technology,: P.I.D.T.Bala Durai Kannan, Ap / Eee, GRT IetDharani KumarОценок пока нет
- 6.control System EngineeringДокумент11 страниц6.control System EngineeringAnonymous 1Xx4mQcqeTОценок пока нет
- Questions and Answers Part-A Unit - I Systems Components and Their RepresentationДокумент29 страницQuestions and Answers Part-A Unit - I Systems Components and Their RepresentationPacha Kolandha NanuОценок пока нет
- Mechtronics Question Papers 25082010Документ9 страницMechtronics Question Papers 25082010Dhurai RajОценок пока нет
- Department of Mechanical-Iv Year Me-2401 Mechatronics Question BankДокумент20 страницDepartment of Mechanical-Iv Year Me-2401 Mechatronics Question BankrkОценок пока нет
- ME 1402 - Mechatronics PDFДокумент6 страницME 1402 - Mechatronics PDFHiru Purushothaman HirudayanathanОценок пока нет
- Question Bank Unit-I Mechatronics, Sensor and Transducers (2 Mark Questions)Документ11 страницQuestion Bank Unit-I Mechatronics, Sensor and Transducers (2 Mark Questions)ChippyVijayanОценок пока нет
- QB BcsДокумент10 страницQB BcsKrishna Reddy Y.VОценок пока нет
- PSS Viva QuestionsДокумент4 страницыPSS Viva QuestionsMAHESH KOPPISETTIОценок пока нет
- Ee1253-Control System Two MarksДокумент9 страницEe1253-Control System Two MarksarivurpОценок пока нет
- Kings: Department of Electronics and Communication EngineeringДокумент12 страницKings: Department of Electronics and Communication EngineeringLatosha FarrellОценок пока нет
- Control System Engineering EC6405 Unit I-Cont Rol Syste M Mod Elin G Part AДокумент12 страницControl System Engineering EC6405 Unit I-Cont Rol Syste M Mod Elin G Part ASivaprakasam KarthikeyanОценок пока нет
- Control System (PT)Документ7 страницControl System (PT)MATHANKUMAR.SОценок пока нет
- BIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSДокумент15 страницBIOMEDICAL ENGINEERING – BCS – SHORT QUESTIONS AND ANSWERS ON BIOLOGICAL CONTROL SYSTEMSNoor AhmedОценок пока нет
- Control Systems (1-135)Документ128 страницControl Systems (1-135)K.Sushita VISTASОценок пока нет
- Control System Modelling and Time Response Analysis NotesДокумент12 страницControl System Modelling and Time Response Analysis NotesSaravanan PazapughalОценок пока нет
- Mechatronics questions bankДокумент11 страницMechatronics questions banksaravananОценок пока нет
- Comprehensive QuestionДокумент1 страницаComprehensive QuestionIgttddr NagОценок пока нет
- ECE - Control System 1 AprДокумент9 страницECE - Control System 1 Aprmukesh soniОценок пока нет
- Control QuestionsДокумент6 страницControl Questionshksaifee0% (1)
- A - Two Mark QuestionsДокумент2 страницыA - Two Mark QuestionsAnonymous p8bHAAxОценок пока нет
- Control Systems - PART - AДокумент12 страницControl Systems - PART - Aaarthir88100% (1)
- 2012 - 6 - Invsetment Declaration - Version 1.3Документ4 страницы2012 - 6 - Invsetment Declaration - Version 1.3bramesh_31Оценок пока нет
- Electrical Projects: Electrical Project Titles, IEEE 2012Документ1 страницаElectrical Projects: Electrical Project Titles, IEEE 2012bramesh_31100% (1)
- Fault AnalysisДокумент1 страницаFault Analysisbramesh_31Оценок пока нет
- Subject: Object Oriented ProgrammingДокумент62 страницыSubject: Object Oriented Programmingbramesh_31Оценок пока нет
- Professional Ethics and Human Values PDFДокумент80 страницProfessional Ethics and Human Values PDFprabu06051984Оценок пока нет
- Ee2251 QBДокумент6 страницEe2251 QBJagadish Babu KondraguntaОценок пока нет
- Question Bank Subject: Digital Logic Circuits Subject Code: EE 2255 Part - B Unit - IДокумент12 страницQuestion Bank Subject: Digital Logic Circuits Subject Code: EE 2255 Part - B Unit - IsunvenkatОценок пока нет
- Step 1Документ1 страницаStep 1bramesh_31Оценок пока нет
- PMC150, PMS150 Datasheet V007 - EN - 20170613Документ52 страницыPMC150, PMS150 Datasheet V007 - EN - 20170613spotОценок пока нет
- Zelio Time Modular Timing Relays CharacteristicsДокумент4 страницыZelio Time Modular Timing Relays CharacteristicsFERBRAM gОценок пока нет
- Power Amplifiers for Proportional Electro-Hydraulic ControlsДокумент23 страницыPower Amplifiers for Proportional Electro-Hydraulic ControlsNguyen Van ChungОценок пока нет
- Wenglor Ultrasonic Data Sheet UMD123U035Документ2 страницыWenglor Ultrasonic Data Sheet UMD123U035Paun Al100% (1)
- A History of The Personal Computer: The People and The TechnologyДокумент526 страницA History of The Personal Computer: The People and The TechnologyRoy A. Allan100% (1)
- 3RK12071BQ400AA3 Datasheet enДокумент5 страниц3RK12071BQ400AA3 Datasheet enNhân LêОценок пока нет
- Wireless Stick Lite Pinout Diagram: NotesДокумент1 страницаWireless Stick Lite Pinout Diagram: NotesSKOLLОценок пока нет
- How To Start Programming For ARM7 Based LPC2148 MicrocontrollerДокумент5 страницHow To Start Programming For ARM7 Based LPC2148 Microcontrollerrudra_1Оценок пока нет
- Saes L 110Документ1 страницаSaes L 110Mohamed RizkОценок пока нет
- MEEN 364 Lecture 4 Examples on Sampling and Aliasing PhenomenaДокумент5 страницMEEN 364 Lecture 4 Examples on Sampling and Aliasing PhenomenaHiren MewadaОценок пока нет
- 05 - List of SymbolsДокумент6 страниц05 - List of Symbolsrajath RaviОценок пока нет
- 18cs442 MC-2Документ2 страницы18cs442 MC-2M.A rajaОценок пока нет
- Chimei Innolux v420hj2-p01Документ30 страницChimei Innolux v420hj2-p01Alexander OrueОценок пока нет
- Vdocuments - MX Edn Design Ideas 2002Документ198 страницVdocuments - MX Edn Design Ideas 2002ciccioОценок пока нет
- Addendum Manual FTДокумент77 страницAddendum Manual FTJUANITOPYTОценок пока нет
- An Introduction to Quantization and Signal ProcessingДокумент16 страницAn Introduction to Quantization and Signal ProcessingMarwaОценок пока нет
- Regulador de Voltage KVGC 202Документ168 страницRegulador de Voltage KVGC 202enriqueunoОценок пока нет
- Ups Liebert PDFДокумент48 страницUps Liebert PDFsebaswvrОценок пока нет
- Lab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The CircuitДокумент10 страницLab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The Circuitlearner guyОценок пока нет
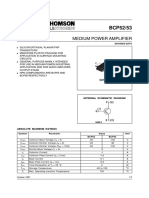
- Medium Power Amplifier: Advance DataДокумент4 страницыMedium Power Amplifier: Advance DataJose M PeresОценок пока нет
- Circuits 2 Quiz 3Документ2 страницыCircuits 2 Quiz 3John Lenard SanchezОценок пока нет
- Powers of 2 Table - Vaughn's SummariesДокумент2 страницыPowers of 2 Table - Vaughn's SummariesAnonymous NEqv0Uy7KОценок пока нет
- Mobile Controlled Home Appliances Without MicrocontrollerДокумент3 страницыMobile Controlled Home Appliances Without MicrocontrollerSaurabh MangeshkarОценок пока нет
- Anna University EE 8451 Exam Questions on Linear Integrated CircuitsДокумент2 страницыAnna University EE 8451 Exam Questions on Linear Integrated CircuitsVVCET - PlacementsОценок пока нет
- U3761mb TelefonoДокумент23 страницыU3761mb Telefonogabriel6276Оценок пока нет
- LINEAR INTEGRATED CIRCUITS Unit3 Raghudathesh VTUДокумент30 страницLINEAR INTEGRATED CIRCUITS Unit3 Raghudathesh VTUraghudatheshОценок пока нет
- Federal Communications Commission 15.245Документ4 страницыFederal Communications Commission 15.245longfei yuanОценок пока нет
- Duty909-1-Phase - SI1S - CompleteДокумент26 страницDuty909-1-Phase - SI1S - Completevignesh kОценок пока нет
- Digital Temperature Switch: Easy Multi-Unit Programming, 16A SPDT Relay OutputДокумент1 страницаDigital Temperature Switch: Easy Multi-Unit Programming, 16A SPDT Relay OutputIvan Hernandez VelazquezОценок пока нет
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsОт EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsОценок пока нет
- Certified Solidworks Professional Advanced Weldments Exam PreparationОт EverandCertified Solidworks Professional Advanced Weldments Exam PreparationРейтинг: 5 из 5 звезд5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)От EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Рейтинг: 5 из 5 звезд5/5 (2)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.От EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Оценок пока нет
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)От EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Рейтинг: 4.5 из 5 звезд4.5/5 (5)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressОт EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressРейтинг: 5 из 5 звезд5/5 (1)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersОт EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersОценок пока нет